



该试验方法适用于金属材料熔焊和压焊接头的拉伸试验。
1.试样
(1)取样位置 试样应从焊接接头垂直于焊缝轴线方向截取,试样加工完成后,焊缝的轴线应位于试样平行长度部分的中间。对小直径管试样可采用整管,未做特殊规定时,小直径管是指外径不大于18mm的管子。
(2)标记 按以下规定进行:
1)每个试件应做标记以便识别其从产品或接头中取出的位置。
2)如果相关标准有要求,应标记相应加工方向(例如轧制方向或挤压方向)。
3)每个试样应做标记以便识别其在试件中的准确位置。
(3)热处理及/或时效 焊接接头或试样一般不进行热处理,但相关标准规定或允许被试验的焊接接头进行热处理除外,这时应在试验报告中详细记录热处理的参数。对于会产生自然时效的铝合金,应记录焊接至开始试验的间隔时间。钢铁类焊缝金属中有氢存在时,可能会对试验结果带来显著影响,需要采取适当的去氢处理。
(4)取样 取样所采用的机械加工方法或热加工方法不得对试样性能产生影响。
1)对于钢材,厚度超过8mm时,不能采用剪切方法。当采用热切割或可能影响切割面性能的其他切割方法从焊件或试件上截取试样时,应确保所有切割面距离试样的表面至少8mm以上。平行于焊件或试件的原始表面的切割,不应采用热切割方法。
2)对于其他金属材料,不得采用剪切方法和热切割方法,只能采用机械加工方法(如锯或铣、磨等)。
(5)机械加工 试样的厚度ts一般应与焊接接头处母材的厚度t相等,如图5-1a所示。当相关标准要求进行全厚度(厚度超过30mm)试验时,可从接头截取若干个试样覆盖整个厚度,如图5-1b所示。在这种情况下,试样相对接头厚度的位置应做记录。

图5-1 试样的位置示例
a)全厚度试验 b)多试样试验
t—焊接接头的厚度(mm) b—平行长度部分宽度(mm) ts—试样厚度(mm)
注:试样可以相互搭接。
1)对于板及管板状试样,试样厚度沿着平行长度Lc对于从管接头截取的试样应均衡一致,其形状和尺寸应符合表5-2及图5-2的规定。对于从管接头截取的试样,可能需要校平夹持端;然而,这种校平及可能产生的厚度的变化不应波及平行长度Lc。
表5-2 板及管板状试样的尺寸 (单位:mm)
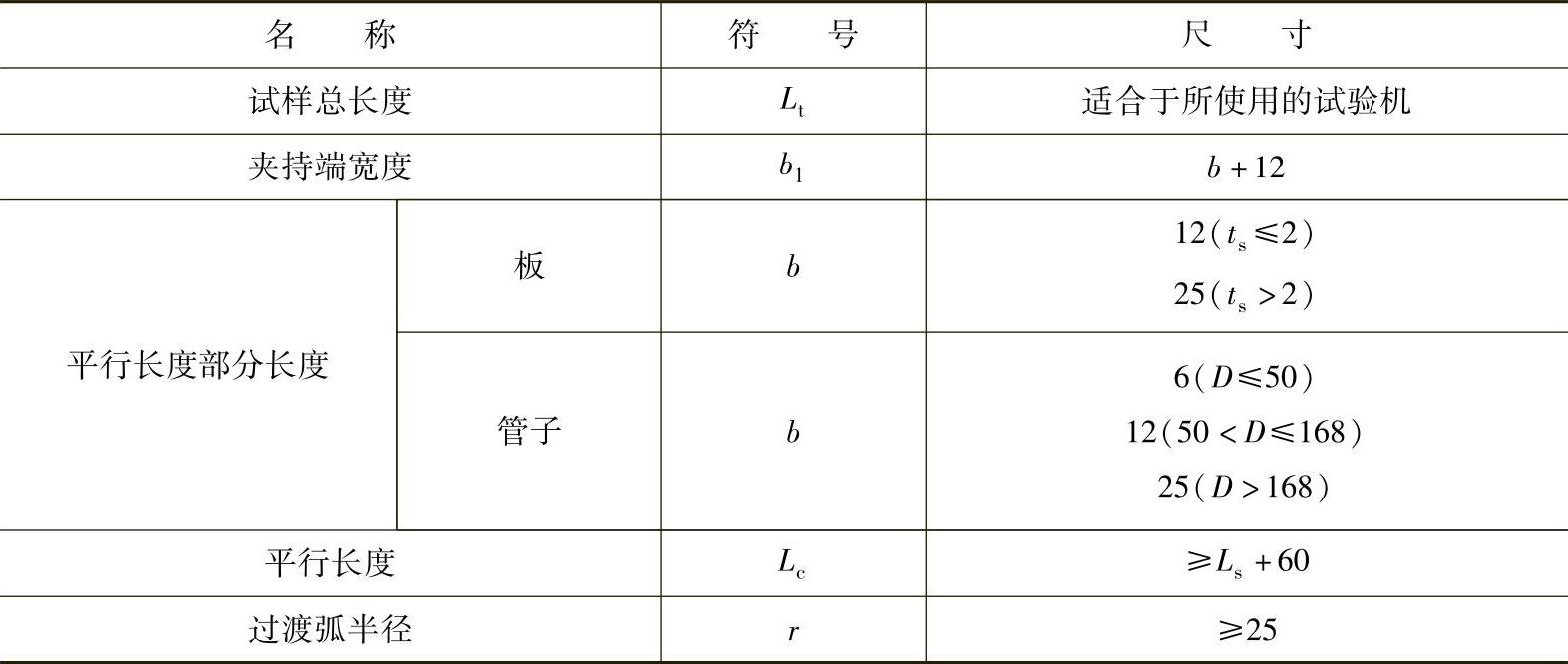
注:1.对于压焊及高能束焊接头而言,焊缝宽度为零(Ls=0)。
2.对于某些金属材料(如铝、铜及其合金)可以要求Lc≥Ls+100mm
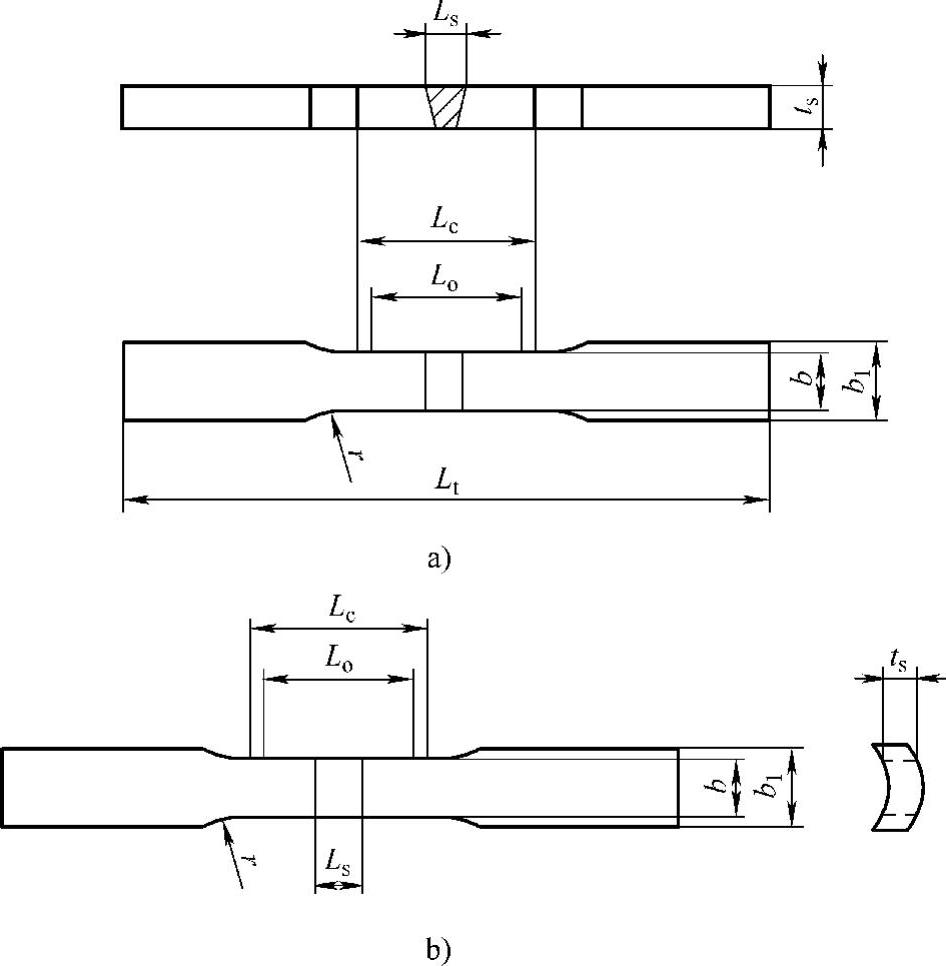
图5-2 板和管接头板状试样
a)板接头 b)管接头
Lo—原始标距(mm)
2)整管拉伸试样尺寸如图5-3所示。

图5-3 整管拉伸试样
d—管塞直径(mm) D—管外径(mm)
3)实心截面试样尺寸应根据协议要求。当需要机加工成圆柱形试样时,试样尺寸应依据GB/T228.1要求,只是平行长度Lc应不小于Lo+60mm,如图5-4所示。

图5-4 实心圆柱形试样
Ls—加工后焊缝的最大宽度(mm)
试样制备的最后阶段要进行机加工,应采取预防措施避免在表面产生变形硬化或过热。试样表面应没有垂直于试样平行长度Lo方向的划痕或切痕,不得除去咬边。超出试样表面的焊缝金属应通过机加工除去,对于有熔透焊道的整管试样应保留管内焊缝。
2.试验设备
(1)电子万能试验机 电子万能试验机结构原理图如图5-5所示,它由测量系统、中横梁驱动系统及载荷机架三个部分组成。
1)测量系统:主要是用以检测材料的承受载荷大小、试样的变形量及中横梁位移多少等。载荷测量是通过应变式载荷传感器及其放大器来实现的。电子万能试验机的特点之一是载荷测量范围宽,小自几克,大至上百吨,都可以满足精度指标要求。它一方面是通过更换不同量程的载荷传感器,另一方面是改变高性能载荷放大器的放大倍数来实现的。放大倍数一般分为1、2、5、10、20、50、100等,前六档与不同量程的传感器配合实现整机载荷量程的覆盖,以满足全载荷试验量程的覆盖。以100kN机为例,只选用4只载荷传感器就可以达到全载荷试验量程的要求,如表5-3所示。100kN载荷传感器载荷范围为2000~100000N;2000N载荷传感器载荷范围40~2000N;50N载荷传感器载荷范围为1~50N;1N载荷传感器载荷范围为0.05~1N,这样就实现了0.05~100000N的全部试验载荷的覆盖。
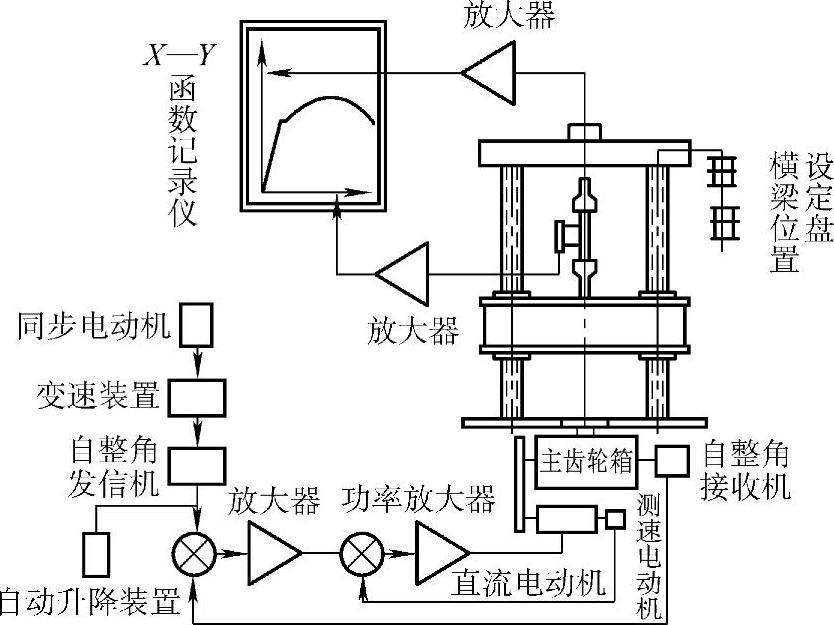
图5-5 电子万能试验机结构原理图
表5-3 力传感器容量与放大器档级的测量范围 (单位:N)

电子载荷测量系统的特点是测量范围宽、精度高、响应快和操作方便。每次使用时,只要进行一次电气标定即可工作,传感器每年由计量部门检定一次。
试样变形的测量是通过引伸计及放大器构成应变测量系统实现的。引伸计规格齐全,其夹具有适应圆试样的,有适应板材试样的,还有适应线材、丝材、片材试样的。标距种类也很多,一般分为100mm、50mm、25mm、12.5mm等。为了扩大使用范围,通常用改变放大器的放大倍数来实现。一般放大器的放大倍数可分为1、2、5、10及20等5个档级,从而减少了引伸计的规格种类。
2)中横梁驱动系统:这一系统是由速度设定单元、伺服放大器、功率放大器、速度与位置检测器、直流伺服电动机以及传动机构组成。由直流伺服电动机驱动主齿轮箱,带动丝杠使中横梁上下移动,结果实现了拉伸、压缩和各种循环试验。速度设定单元主要是给出了与速度相对应的准确模拟电压值或数字量,要求精度高稳定可靠,并且范围宽。通常为1∶10000(0.05~500mm/min),1100系列电子拉伸机速度范围最宽1∶20000(0.05~1000mm/min)。伺服放大器的作用实际上是一个将速度给定信号、速度检测信号、位置检测信号以及功率放大器的电流大小汇总在一起,按要求运算后发出指令去驱动功率放大器,进而使直流伺服电动机按预先给定速度转动。这一伺服控制系统有三个环路,即通常所说的速度、位置及电流反馈。采用光电编码器之类的解析器作为检测元件的位置反馈系统是速度控制精度高的基本保证。
3)载荷机架:从图5-5中看到,电子万能试验机的载荷机架包括上横梁、中横梁、台面和丝杠副。有的试验机(如1185型机),用两根圆柱与上横梁和台面构成框架,这两根圆柱作为中横梁上下运动的导向柱;也有的用槽钢与上横梁和台面构成框架,这样既保证了机架的刚度又使机架结构匀称合理。传动载荷的一对丝杠,有的试验机选用梯形丝杠,有的则为了提高传动效率选用了滚珠丝杠,而且丝杠与中横梁啮合处采用了消隙结构,这样使试验机在做全反复试验时,大大减少了载荷换向间隙,从而提高了传动精度。
(2)试验机的技术要求 试验机的测力系统应按照GB/T16825.1进行校准,并且其准确度应为1级或优于1级。为了保证试验结果准确可靠,拉力试验机应满足如下要求。
1)加力和卸力应平稳、无冲击和颤动。
2)测力示值误差不大于±1%,达到试验机检定的1级精度。
3)在更换不同摆锤时,指针的变动不大于0.1个分度。
4)试验保持时间不应少于30s,在30s内力的示值变动范围应小于0.4%。
5)试验机及其夹持装置应保证试样轴向受力。
试验机的技术要求应由政府计量管理部门或本单位的计量管理人员按有关规程检定。凡未经检定或检定不合格的试验机,严禁在生产及科研中使用。
(3)引伸计的结构及选用 引伸计用于测量拉伸试样的微量变形,或者研究构件在外力作用下的线性变形所采用的仪器。引伸计一般由三部分组成。
1)感受变形部分:用来直接与试样表面接触,以感受试样的变形。
2)传递和放大部分:把所感受的变形加以放大的机构。
3)指示部分:指示或记录变形大小的机构,有机械式和光学式的两种。
应变式位移传感器主要由粘贴有应变片的弹性元件组成,在小应变条件下,弹性元件上的应变与所受外力成正比,也与弹性元件的变形成正比。如果在弹性元件的合适部位粘贴上应变片,并接成电桥形式,则可将弹性元件所感受的变形转换成电参量输出,再通过放大、显示或记录仪器就可以把变形量显示或记录下来。这种传感器的特点是精度高、线性好、装卸方便,试样断裂时,弹性元件能自动脱落,可用来测拉伸全曲线。
引伸计的准确度级别应符合GB/T12160的要求。测定上屈服强度、下屈服强度、屈服点延伸率、规定塑性延伸强度、规定总延伸强度、规定残余延伸强度,以及规定残余延伸强度的验证试验,应使用不劣于1级准确度的引伸计;测定其他具有较大延伸率的性能,例如抗拉强度、最大力总延伸率和最大力塑性延伸率、断裂总延伸率,以及断后伸长率,应使用不劣于2级准确度的引伸计。
3.试验要求
1)试验开始前,应测量并记录试样尺寸。
2)依据GB/T228.1规定对试样逐渐连续加载。
3)除非另有规定,试验一般应在23℃±5℃的温度条件下进行。
4)其他试验要求与室温拉伸试验相同。
4.设定试验力零点
在试验加载链装配完成后,试样两端被夹持之前,应设定力测量系统的零点。一旦设定了力值零点,在试验期间力测量系统不能再发生变化。
上述方法一方面是为了确保夹持系统的重量在测力时得到补偿,另一方面是为了保证夹持过程中产生的力不影响力值的测量。
5.试样的夹持方法
应使用例如楔形夹头、螺纹夹头、平推夹头、套环夹具等合适的夹具夹持试样。
应尽最大努力确保夹持的试样受轴向拉力的作用,尽量减小弯曲。这对试验脆性材料或测定规定塑性延伸强度、规定总延伸强度、规定残余延伸强度或屈服强度时尤为重要。
为了得到直的试样和确保试样与夹头对中,可以施加不超过规定强度或预期屈服强度的5%相应的预拉力。宜对预拉力的延伸影响进行修正。
6.应变速率控制的试验速率
(1)一般要求 包含两种不同类型的应变速率控制模式。第一种应变速率 是基于引伸计的反馈而得到。第二种是根据平行长度估计的应变速率
是基于引伸计的反馈而得到。第二种是根据平行长度估计的应变速率 ,即通过控制平行长度与需要的应变速率相乘得到的横梁位移速率来实现。
,即通过控制平行长度与需要的应变速率相乘得到的横梁位移速率来实现。
如果材料显示出均匀变形能力,力值能保持名义的恒定,应变速率 和根据平行长度估计的应变速率
和根据平行长度估计的应变速率 大致相等。如果材料展示出不连续屈服或锯齿状屈服或发生缩颈时,两种速率之间会存在不同。随着力值的增加,试验机的柔度可能会导致实际的应变速率明显低于应变速率的设定值。
大致相等。如果材料展示出不连续屈服或锯齿状屈服或发生缩颈时,两种速率之间会存在不同。随着力值的增加,试验机的柔度可能会导致实际的应变速率明显低于应变速率的设定值。
试验速率应满足下列要求:
1)在直至测定ReH、RP或Rt的范围,应按照规定的应变速率 。这一范围需要在试样上装夹引伸计,消除拉伸试验机柔度的影响,以准确控制应变速率(对于不能进行应变速率控制的试验机,根据平行长度部分估计的应变速率
。这一范围需要在试样上装夹引伸计,消除拉伸试验机柔度的影响,以准确控制应变速率(对于不能进行应变速率控制的试验机,根据平行长度部分估计的应变速率 也可用)。
也可用)。
2)对于不连续屈服的材料,应选用根据平行长度部分估计的应变速率 。这种情况下是不可能用装夹在试样上的引伸计来控制应变速率的,因为局部的塑性变形可能发生在引伸计标距以外。在平行长度范围,利用恒定的横梁位移速率vc,根据下式计算得到的应变速率具有足够的准确度。
。这种情况下是不可能用装夹在试样上的引伸计来控制应变速率的,因为局部的塑性变形可能发生在引伸计标距以外。在平行长度范围,利用恒定的横梁位移速率vc,根据下式计算得到的应变速率具有足够的准确度。
式中  ——平行长度估计的应变速率,单位为s-1;
——平行长度估计的应变速率,单位为s-1;
Lc——平行长度,单位为mm。
3)在测定Rp、Rt或屈服结束之后,应该使用 或
或 。为了避免由于缩颈发生在引伸计标距以外控制出现问题,推荐使用
。为了避免由于缩颈发生在引伸计标距以外控制出现问题,推荐使用 。
。
在测定相关材料性能时,应保持规定的应变速率,如图5-6所示。
在进行应变速率或控制模式转换时,不应在应力-延伸率曲线上引入不连续性,而歪曲Rm、Ag或Agt值(见图5-6)。这种不连续效应可以通过降低转换速率得以减轻。
应力-延伸率曲线在加工硬化阶段的形状可能受应变速率的影响。采用的试验速率应通过文件来规定。
(2)上屈服强度ReH或规定延伸强度Rp、Rt和Rr的测定 当测定上屈服强度ReH或规定延伸强度Rp、Rt和Rr时,应变速率 应保持恒定。在测定这些性能时,e
应保持恒定。在测定这些性能时,e 应选用下面两个范围之一。
应选用下面两个范围之一。
1)范围1: ,相对误差±20%。
,相对误差±20%。
2)范围2: ,相对误差±20%(如果没有其他规定,推荐选取该速率)。
,相对误差±20%(如果没有其他规定,推荐选取该速率)。
如果试验机不能直接进行应变速率控制,应该采用通过平行长度估计的应变速率 。即恒定的横梁位移速率,该速率应用下式进行计算:
。即恒定的横梁位移速率,该速率应用下式进行计算:

图5-6 应变速率范围
 —应变速率t—拉伸试验时间进程 tc—横梁控制时间tec—引伸计控制时间或横梁控制时间1—范围1:
—应变速率t—拉伸试验时间进程 tc—横梁控制时间tec—引伸计控制时间或横梁控制时间1—范围1: ,相对误差±20%2—范围2:
,相对误差±20%2—范围2: ,相对误差±20%3—范围3:
,相对误差±20%3—范围3: ,相对误差±20%4—范围4:
,相对误差±20%4—范围4: ,相对误差±20%
,相对误差±20%
①推荐的。
②如果试验机不能测量或控制应变速率。
上式没有考虑试验装置(机架、力传感器、夹具等)的弹性变形。这意味着应将变形分为试验装置的弹性变形和试样的弹性变形。横梁位移速率只有一部分转移到了试样上。试样上产生的应变速率em由下式给定:
式中 CM——试验装置的刚度,单位为mm/N(在试验装置的刚度不是线性的情
况下,比如楔形夹头,应取相关参数点例如Rp0.2附近的刚度值); ——试样上产生的应变速率,单位为s-1;
——试样上产生的应变速率,单位为s-1;
Lc——试样的平行长度,单位为mm;(https://www.xing528.com)
m——给定时刻应力-延伸曲线的斜率(例如Rp0.2附近点),单位为MPa;
So——原始横截面积,单位为mm2;
vc——横梁位移速率,单位为mm/s。
注:从应力-应变曲线弹性部分得到的m和CM不能用。
 不能补偿柔度效应,试样上产生应变速率em所需近似横梁位移速率可以根据下式计算得到:
不能补偿柔度效应,试样上产生应变速率em所需近似横梁位移速率可以根据下式计算得到:

(3)下屈服强度ReL和屈服点延伸率Ae的测定 上屈服强度之后,在测定下屈服强度和屈服点延伸率时,应当保持下列两种范围之一的平行长度估计的应变速率 ,直到不连续屈服。
,直到不连续屈服。
1)范围2: ,相对误差±20%(测定ReL时推荐该速率)。
,相对误差±20%(测定ReL时推荐该速率)。
2)范围3: ,相对误差±20%。
,相对误差±20%。
(4)抗拉强度Rm、断后伸长率A、最大力下的总延伸率Agt、最大力下的塑性延伸率Ag和断面收缩率Z的测定 在屈服强度或塑性延伸强度测定后,根据试样平行长度估计的应变速率 。应转换成下述规定范围之一的应变速率。
。应转换成下述规定范围之一的应变速率。
1)范围2: ,相对误差±20%。
,相对误差±20%。
2)范围3: ,相对误差±20%。
,相对误差±20%。
3)范围4: ,相对误差±20%(如果没有其他规定,推荐选取该速率)。
,相对误差±20%(如果没有其他规定,推荐选取该速率)。
如果拉伸试验仅仅是为了测定抗拉强度,根据范围3或范围4得到的平行长度估计的应变速率适用于整个试验。
7.原始标距的标记
应用小标记、细画线或细墨线标记原始标距,但不得用引起过早断裂的缺口作为标记。
对于比例试样,如果原始标距的计算值与其标记值之差小于10%Lo。可将原始标距的计算值按GB/T8170修约至最接近5mm的倍数。原始标距的标记应准确到±1%。如平行长度Lc比原始标距长许多,例如不经机加工的试样,可以标记一系列套叠的原始标距。有时,可以在试样表面划一条平行于试样纵轴的线,并在此线上标记原始标距。
8.屈服强度的测定
(1)上屈服强度ReH 上屈服强度ReH可以从力-延伸曲线图或峰值力显示器上测得,定义为力首次下降前的最大力值对应的应力。
(2)下屈服强度ReL 下屈服强度ReL可以从力-延伸曲线上测得,定义为不计初始瞬时效应时屈服阶段中的最小力所对应的应力。
(3)位置判定 对于上、下屈服强度位置判定的基本原则如下:
1)屈服前的第1个峰值应力(第1个极大值应力)判为上屈服强度,不管其后的峰值应力比它大或比它小。
2)屈服阶段中如呈现两个或两个以上的谷值应力,舍去第1个谷值应力(第1个极小值应力)不计,取其余谷值应力中之最小者判为下屈服强度。如只呈现1个下降谷,此谷值应力判为下屈服强度。
3)屈服阶段中呈现屈服平台,平台应力判为下屈服强度。如呈现多个而且后者高于前者的屈服平台,判第1个平台应力为下屈服强度。
4)正确的判定结果应是下屈服强度一定低于上屈服强度。
为提高试验效率,可以报告在上屈服强度之后延伸率为0.25%范围以内的最低应力为下屈服强度,不考虑任何初始瞬时效应。用此方法测定下屈服强度后,试验速率可以增加。试验报告应注明使用了此简捷方法。此规定仅仅适用于呈现明显屈服的材料和不测定屈服点延伸率情况。
9.抗拉强度的测定
对于呈现明显屈服(不连续屈服)现象的金属材料,从记录的力-延伸或力-位移曲线图,或从测力度盘读取过了屈服阶段之后的最大力,如图5-7所示。对于呈现无明显屈服(连续屈服)现象的金属材料,从记录的力-延伸或力-位移曲线图,或从测力度盘读取试验过程中的最大力Fm。最大力除以试样原始横截面积(So)得到抗拉强度。
对于显示特殊屈服现象的材料,相应于上屈服点的应力可能高于此后任一应力值(第二极大值,见图5-8)。如遇此种情况,需要选定两个极大值中之一作为抗拉强度。

图5-7 最大力Fm

图5-8 出现特殊屈服现象材料的抗拉强度
从应力-延伸率曲线测定抗拉强度Rm的几种不同类型如图5-9所示。

图5-9 应力-延伸率状态的特殊情况
a)ReH<Rm b)ReH>Rm c)应力-延伸率状态的特殊情况
10.规定塑性延伸强度的测定
(1)定义法 根据力-延伸曲线图测定规定塑性延伸强度Rp。在曲线图上,做一条与曲线的弹性直线段部分平行,且在延伸轴上与此直线段的距离等效于规定塑性延伸率,如0.2%的直线。此平行线与曲线的交截点给出相应于所求规定塑性延伸强度的力。此力除以试样原始横截面积So得到规定塑性延伸强度。
如力-延伸曲线图的弹性直线部分不能明确地确定,以致不能以足够的准确度做出这一平行线,推荐采用如下方法,如图5-10所示。
试验时,当已超过预期的规定塑性延伸强度后,将力降至约为已达到的力的10%,然后再施加力直至超过原已达到的力。为了测定规定塑性延伸强度,过滞后环两端点画一直线,然后经过横轴上与曲线原点的距离等效于所规定的塑性延伸率的点,做平行于此直线的平行线。

图5-10 规定塑性延伸强度Rp
e—延伸率 ep—规定的塑性延伸率
R—应力 Rp—规定塑性延伸强度
平行线与曲线的交截点给出相应于规定塑性延伸强度的力。此力除以试样原始横截面积得到规定塑性延伸强度,如图5-10所示。
1)可以用各种方法修正曲线的原点。做一条平行于滞后环所确定的直线的平行线并使其与力-延伸曲线相切,此平行线与延伸轴的交截点即为曲线的修正原点。
2)在力降低开始点的塑性应变只略微高于规定塑性延伸强度Rp。较高应变的开始点将会降低通过滞后环获得直线的斜率。
3)如果在产品标准中没有规定或得到客户的同意,在不连续屈服期间或之后测定规定塑性延伸强度是不合适的。
(2)逐步逼近法 逐步逼近方法适用于具有无明显弹性直线段金属材料的规定塑性延伸强度的测定,也适用于力-延伸曲线图具有弹性直线段高度不低于0.5Fm的金属材料,其塑性延伸强度的测定亦适用。
试验时,记录力-延伸曲线图,至少直至超过预期的规定塑性延伸强度的范围。在力-延伸曲线上任意估取A0点拟为规定塑性延伸率等于0.2%时的力F0P0.2,在曲线上分别确定力为0.1F0P0.2和0.5F0P0.2的B1和D1两点,做直线B1D1。从曲线原点O(必要时进行原点修正)起截取OC段(OC=0.2%nLe,式中n为延伸放大倍数),过C点做平行于B1D1的平行线CA1交曲线于A1点。如A1与A0重合,F0P0.2即为相应于规定塑性延伸率为0.2%时的力。
如果A1点未与A0重合,需要按照上述步骤进行进一步逼近。此时,取A1点的力FP10.2,在曲线上分别确定力为0.1FP10.2和0.5FP10.2的B2和D2两点,做直线B2D2。过C点做平行于B2D2的平行线CA2交曲线于A2点。如此逐步逼近,直至最后一次得到的交点An与前一次的交点An-1重合,如图5-11所示。An的力即为规定塑性延伸率达0.2%时的力。此力除以试样原始横截面积得到测定的规定塑性延伸强度Rp0.2。

图5-11 逐步逼近法测定规定非比例延伸强度Rp0.2
最终得到的直线BnDn的斜率,一般可以作为确定其他规定塑性延伸强度的基准斜率。
逐步逼近方法测定软铝等强度很低的材料的塑性延伸强度时显示出不适合性。
11.断后伸长率的测定
(1)断后伸长率不小于5%的测定方法 测定方法如下:
1)为了测定断后伸长率,应将试样断裂的部分仔细地配接在一起使其轴线处于同一直线上,并采取特别措施确保试样断裂部分适当接触后测量试样断后标距。
这对小横截面试样和低伸长率试样尤为重要。按下式计算断后伸长率A:

式中 A——断后伸长率(%);
Lo——原始标距,单位为mm;
Lu——断后标距,单位为mm。
应使用分辨力足够的量具或测量装置测定断后伸长量(Lu-Lo),并准确到±0.25mm。
2)如果规定的最小断后伸长率小于5%,建议采取特殊方法进行测定。原则上只有断裂处与最接近的标距标记的距离不小于原始标距的1/3情况方为有效。但断后伸长率大于或等于规定值,不管断裂位置处于何处测量均为有效。如果断裂处与最接近的标距标记的距离小于原始标距的1/3时,可采用移位法测定断后伸长率。
3)能用引伸计测定断裂延伸的试验机,引伸计标距应等于试样原始标距,无须标出试样原始标距的标记。以断裂时的总延伸作为伸长测量时,为了得到断后伸长率,应从总延伸中扣除弹性延伸部分。为了得到与手工方法可比的结果,有一些额外的要求(如引伸计高的动态响应和频带宽度)。原则上,断裂发生在引伸计标距Le以内方为有效,但断后伸长率等于或大于规定值,不管断裂位置处于何处测量均为有效。如果产品标准规定用一固定标距测定断后伸长率,引伸计标距应等于这一标距。
4)仅当标距或引伸计标距、横截面的形状和面积均为相同时,或当比例系数k相同时,断后伸长率才具有可比性。
(2)断后伸长率小于5%的测定方法 在测定小于5%的断后伸长率时应加倍小心。一般采用的方法为:试验前在平行长度的两端处做一很小的标记。使用调节到标距的分规,分别以标记为圆心划一圆弧。拉断后,将断裂的试样置于一装置上,最好借助螺钉施加轴向力,以使其在测量时牢固地对接在一起。以最接近断裂的原圆心为圆心,以相同的半径划第二个圆弧,如图5-12所示。用工具显微镜或其他合适的仪器测量两个圆弧之间的距离即为断后伸长率,准确到±0.02mm。为使划线清晰可见,试验前涂上一层染料。

图5-12 断后伸长率小于5%的测定方法
a)扯断前画弧 b)断裂后第1次画弧 c)断裂后第1次画弧
(3)伸长率的换算 一般采用公式法。
1)由已知比例标距的伸长率换算到另一个比例标距的伸长率,按下式计算:
Ar=λA
式中 Ar——另一个比例标距的伸长率(%);
A——已知比例标距的伸长率(%);
λ——换算因子(碳素钢与低合金钢见表5-4,奥氏体钢见表5-5)。
表5-4 不同比例标距之间伸长率的换算因子λ(碳素钢与低合金钢)

注:原始标距 ;10do=11.3So。
;10do=11.3So。
表5-5 不同比例标距之间伸长率的换算因子λ(奥氏体钢)

注:原始标距5do=5.65So;10do=11.3So。
例:已知碳素钢试样标距 的伸长率为25%,换算成标距
的伸长率为25%,换算成标距 的伸长率。查表5-4,λ=0.758,则Ar=0.758×25%=18.95%,修约到19%。
的伸长率。查表5-4,λ=0.758,则Ar=0.758×25%=18.95%,修约到19%。
2)横截面积相等的试样,从一个定标距伸长率换算到另一个定标距的伸长率,按下式计算:
Ar=αA
式中 Ar——另一个定标距的伸长率(%);
A——已知定标距的伸长率(%);
α——换算因子。
12.断面收缩率的测定
将试样断裂部分仔细地配接在一起,使其轴线处于同一直线上。断裂后最小横截面积的测定应准确到±2%。原始横截面积与断后最小横截面积之差除以原始横截面积的百分率得到断面收缩率,按照下式计算:

式中 Z——断面收缩率(%);
So——平行长度部分的原始横截面积,单位为mm2;
Su——断后最小横截面积,单位为mm2。
对于小直径的圆试样或其他横截面形状的试样,断后横截面积的测量准确度达到±2%很困难。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。