



并联逆变器零共模算法在理想情况下可以实现在全周期内消除共模电压,但是在实际情况下由于逆变器存在非理想因素,尤其是桥臂死区时间的存在,对零共模算法的影响很大,给共模电压的消除带来了困难。通常电压型逆变器中桥臂加入死区时间是为了保证桥臂在工作时不会直通短路,但是这也带来了桥臂电压与PWM驱动信号不同步的问题。这种不同步的根本原因是在死区时间内,输出的桥臂电压不再受PWM信号控制,而是取决于桥臂电流的续流方向。不同电流情况下的桥臂工作状态如图7-68所示。
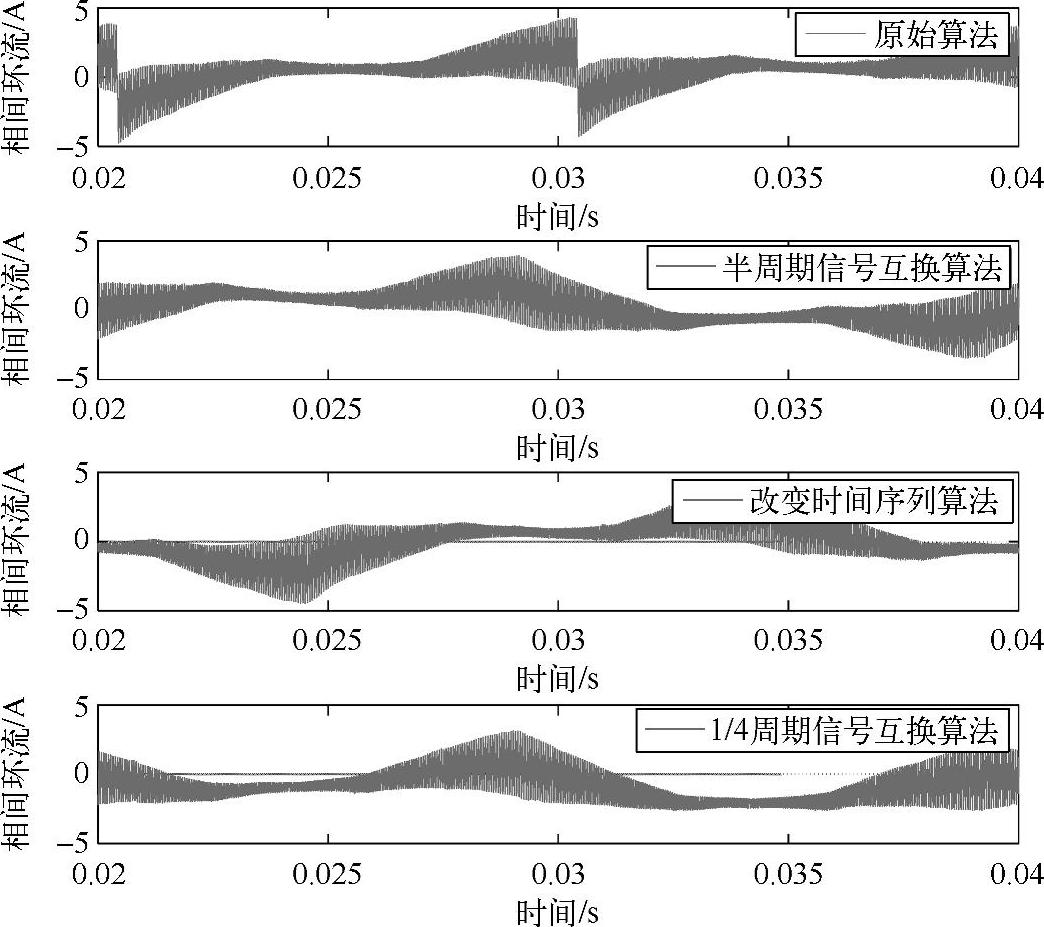
图7-66 并联零共模原始算法与改进算法的相间差模环流的波形对比
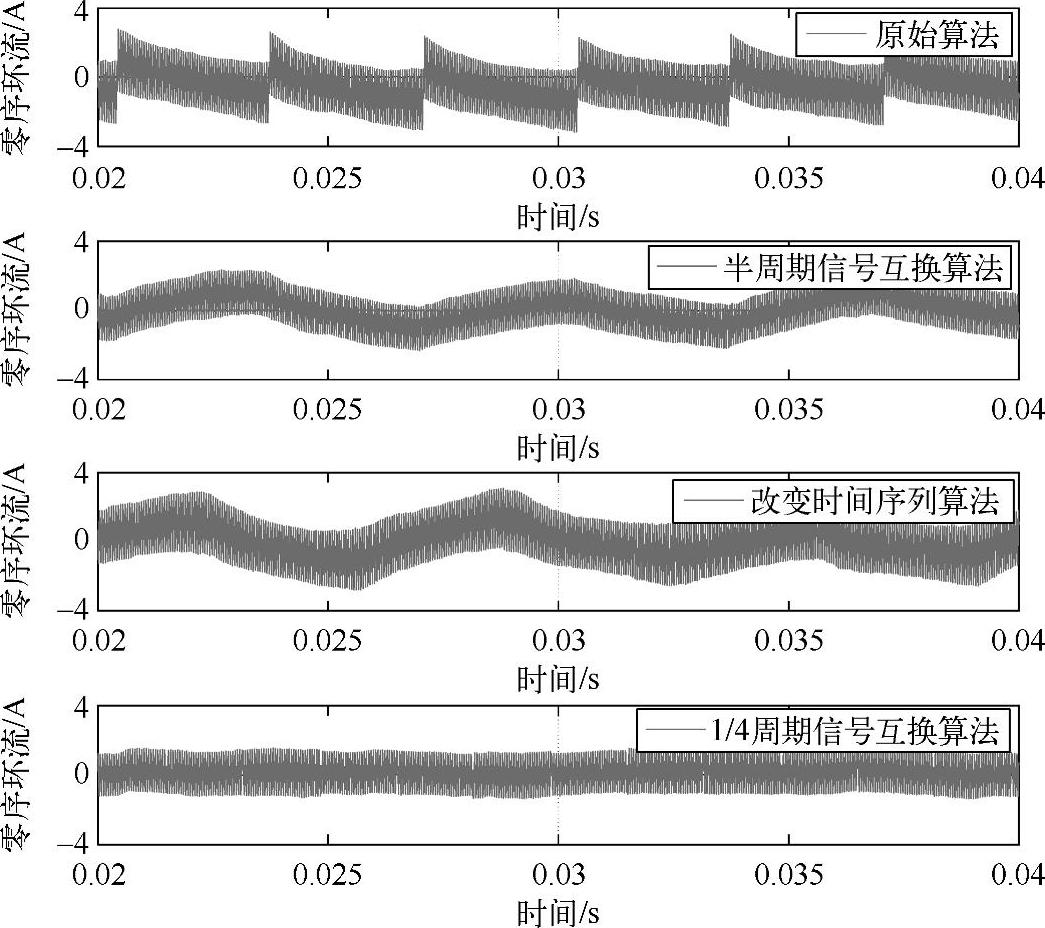
图7-67 并联零共模原始算法与改进算法的相间差模环流的波形对比
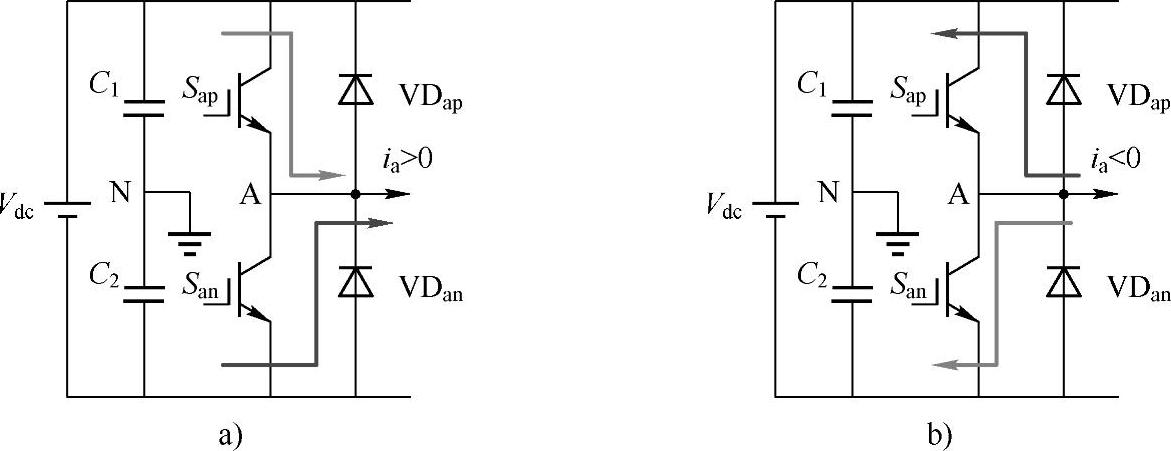
图7-68 不同电流情况下的桥臂工作状态
a)桥臂电流ia>0时 b)桥臂电流ia<0时
以图7-68a为例分析一个开关周期内桥臂电压的输出情况。假设桥臂电流ia>0在一个开关周期内总成立,即电流不出现过零情况,这样保证在上管关断后电流能在下管的反并联二极管中正常续流,此时一个开关周期存在三种情况:如果桥臂上管导通同时下管关断,电流从桥臂上管流出,此时桥臂输出为正直流母线电压;如果桥臂上管关断同时下管导通,则电流从桥臂下管的反并联二极管流出,此时桥臂输出为负直流母线电压;另外由于死区时间的存在,桥臂存在两个开关管同时关断的情况,此时电流只能从桥臂下管的反并联二极管流出,桥臂输出为负直流母线电压。桥臂电流小于零时同样可以按照上面的思路分析得到相应的输出状态,其原理如图7-68b所示。
依据上面的桥臂工作状态,可以确定电流在死区时间内正常续流情况下的上、下管驱动信号和桥臂电压波形(包括理想情况与实际情况)如图7-69所示,其中图7-69a为桥臂电流大于零时的波形,图7-69b为桥臂电流小于零时的波形。
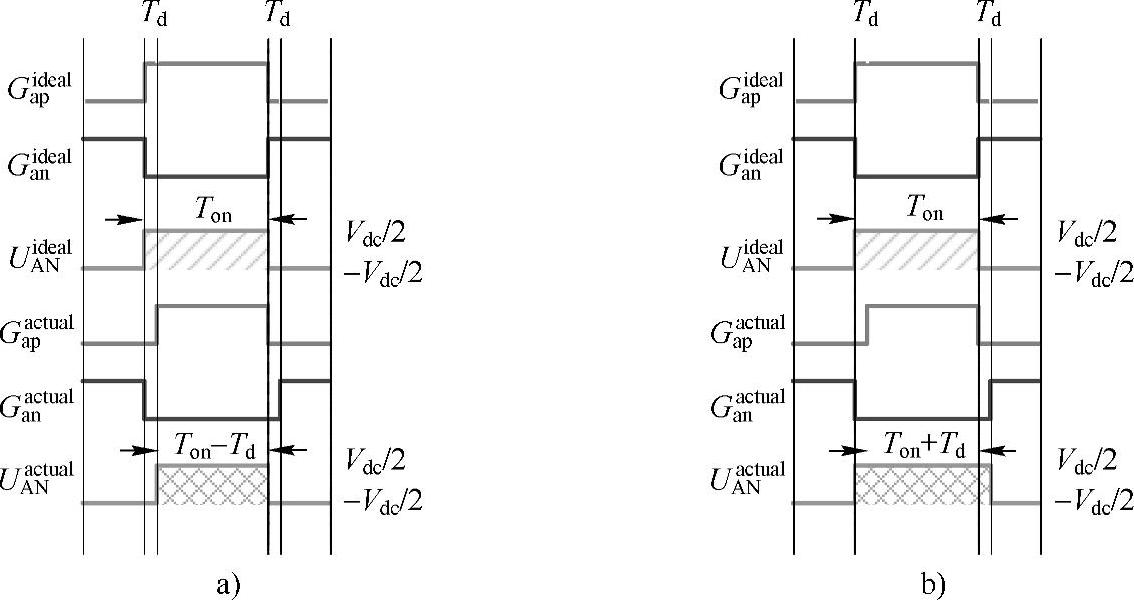
图7-69 理想与实际情况下的驱动信号与桥臂电压波形
a)桥臂电流ia>0时 b)桥臂电流ia<0时
可以看出当加入死区时间后,实际输出的桥臂电压波形不再与理想的上管驱动波形同步,也与理想的桥臂电压不同,其原因在于死区时间段的桥臂电流续流方向可能改变桥臂输出的电压极性。如果桥臂电流大于零,则在死区时间内电流通过下管的反并联二极管续流,则此时桥臂钳位到负母线,桥臂电压输出为-Vdc/2;如果桥臂电流小于零,则在死区时间内电流通过上管的反并联二极管续流,则此时桥臂钳位到正母线,桥臂电压输出为Vdc/2。
以上是考虑桥臂电流在一段时间内方向不变的情况,这时电流能在反并联二极管中正常续流。如果桥臂电流接近于零,则在一个开关周期内可能存在电流过零的情况,如果电流过零发生在死区时间内,则还存在电流不能正常续流的情况,也就是零电流钳位效应。零电流钳位效应在一般的桥臂中存在4种情况,如图7-70所示,其中Td为死区时间段,T1为死区时间内正常续流的时间段,T2为死区时间内零电流钳位的时间段。
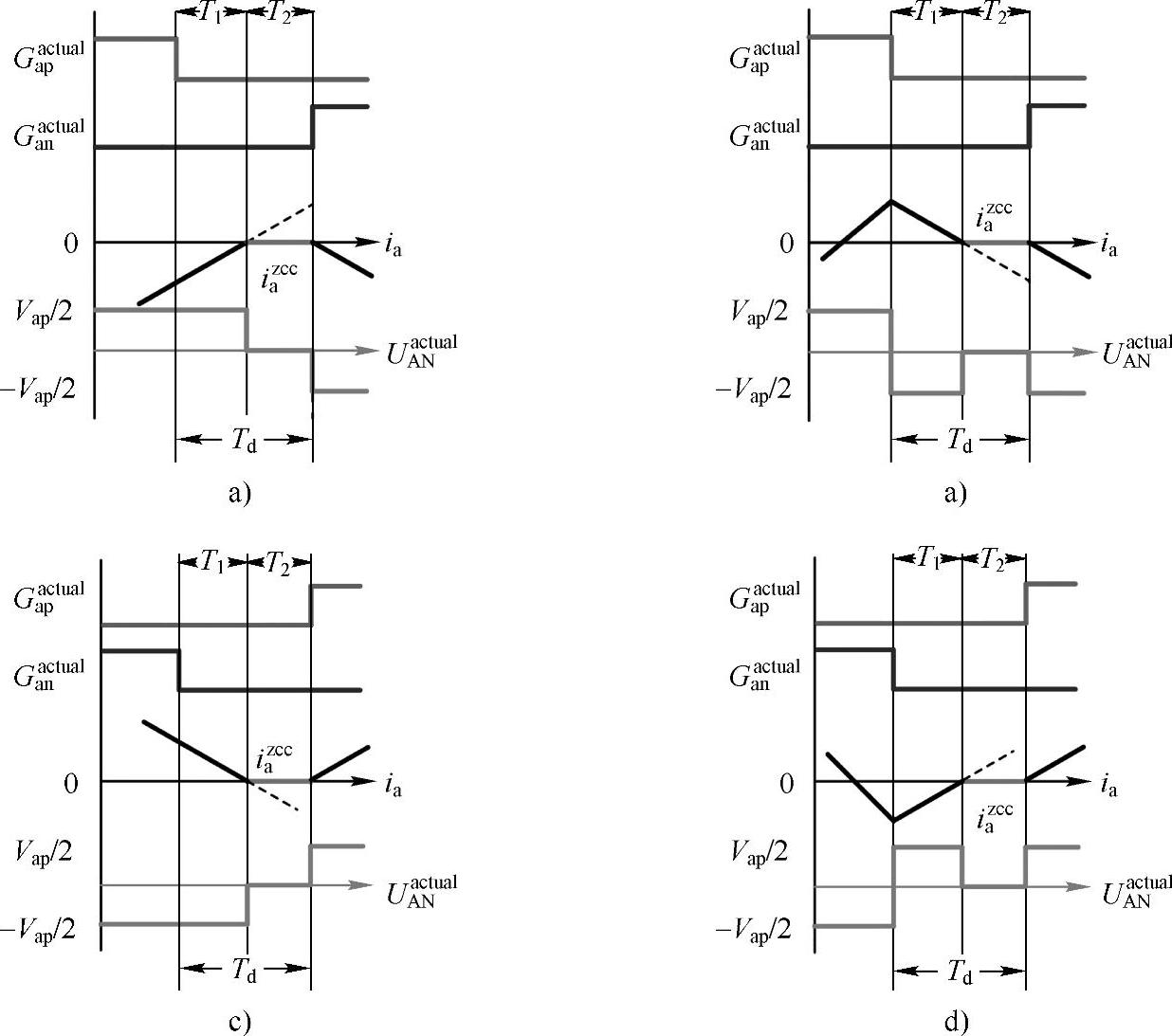
图7-70 零电流钳位的四种情况
a)下管上升沿延时同时起始桥臂电流ia<0时 b)下管上升沿延时同时起始桥臂电流ia>0时 c)上管上升沿延时同时起始桥臂电流ia>0时 d)上管上升沿延时同时起始桥臂电流ia<0时
以图7-70a为例分析零电流钳位效应和影响,其中下管的驱动信号加入上升沿延时构成桥臂的死区时间。如果桥臂电流小于零同时非常接近于零,在未进入死区时间段时,由于上管关断,下管导通,电流将通过上管的反并联二极管续流回正母线,此时桥臂输出为Vdc/2,此时电流维持减小的趋势。当进入死区时间段后,电流同样通过上管的反并联二极管续流回正母线,桥臂电流继续减小;如果在未离开死区时间段时,桥臂电流已经减为零,由于此时上管和下管均处于关断状态,电流无法再反向流通,则只能维持在零状态,也即为零电流钳位效应,此时由于开关管均关断,则桥臂输出电压为零。当上管重新导通之后,电流经过上管输出到负载,此时桥臂电流为大于零的状态。其他三种情况也可以做类似的分析。
零电流钳位效果的存在,使桥臂损失的伏秒不再跟死区时间和直流母线电压成正比关系,不能准确地计算出来,从而使得实现准确的死区补偿变得更加复杂。另外由于零电流钳位导致桥臂短时输出零电压状态,对并联逆变器共模电压消除效果也存在一定影响。综上所述,为了实现共模电压消除的效果,需要设计合适的死区补偿方案以消除由死区时间以及零电流钳位造成的共模电压无法消除的现象。
逆变器输出的电流包含基波电流和纹波电流,虽然并联逆变器的拓扑区别于一般的两电平三相逆变器,但是其桥臂的电流纹波同样可以运用戴维南等效电路的方法进行预测。再通过准确的电流采样,即可实现逆变器输出电流轨迹的还原,从而判断实时桥臂电流方向,进而实施相应的死区补偿方案。对于一般的死区效应(忽略零电流钳位现象),以A1桥臂为例,分析其各种情况下的补偿方法,如图7-71所示。
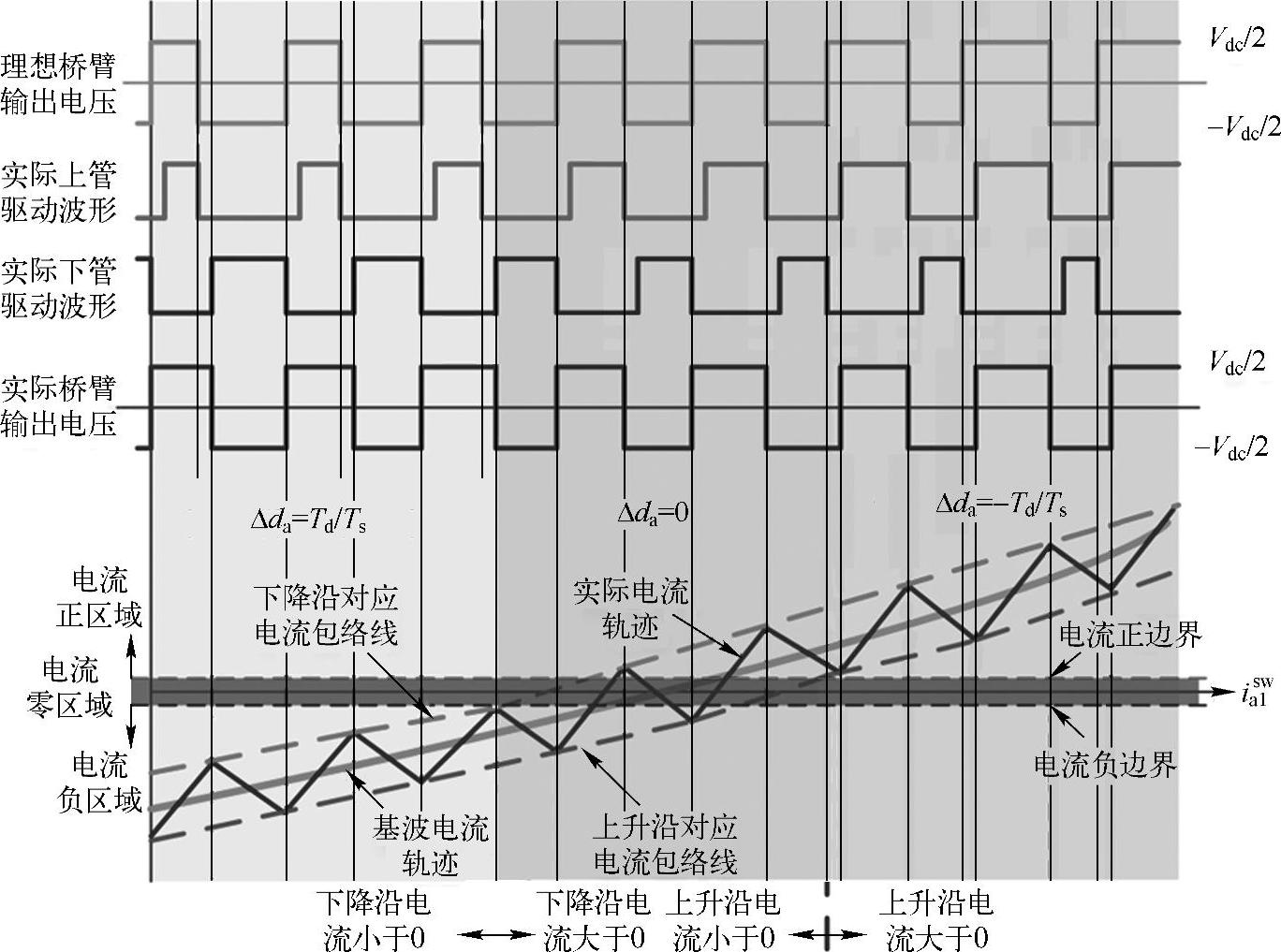
图7-71 有死区时间的桥臂驱动信号、理想和实际的桥臂电压、桥臂电流波形示意图
对于逆变器输出的电流,其在一个开关周期内的峰值一般对应于驱动波形的上升沿或者下降沿时刻,可以根据实时计算的上升沿和下降沿的电流纹波峰值,再叠加实时的基波采样电流估计桥臂电流的大小和方向,这样比单纯考虑基波电流进行死区补偿要更为准确。
根据以上电流的轨迹,可以分4种情况讨论补偿方案:
1)桥臂电流在一个开关周期均大于零,即桥臂电流处于电流正区域,满足上升沿时刻对应的桥臂电流(最小电流)大于电流正边界。此时桥臂电流在死区时间通过下管的反并联二极管续流,则这段时间输出的桥臂电压为-Vdc/2,导致实际桥臂电压的占空比相比理想桥臂电压减小Td/Ts,此时需要将上管的上升沿时刻提前。(https://www.xing528.com)
2)桥臂电流在一个开关周期均小于零,即桥臂电流处于电流负区域,满足下降沿时刻对应的桥臂电流(最大电流)小于电流负边界。此时桥臂电流在死区时间通过上管的反并联二极管续流,则这段时间输出的桥臂电压为Vdc/2,导致实际桥臂电压的占空比相比理想桥臂电压增大Td/Ts,此时需要将上管的上升沿时刻延后。
3)桥臂电流在一个开关周期存在过零点,但是电流峰值在零区域之外,即上升沿时刻对应的桥臂电流(最小电流)小于电流负边界,同时下降沿时刻对应的桥臂电流(最大电流)大于电流负边界。这样即使存在桥臂电流过零的情况,由于桥臂电流的峰值离零点较远,不会在死区时间段内产生零电流钳位的现象,此时实际桥臂电压波形与理想桥臂电压波形一致,即该区域内的死区时间桥臂续流对桥臂电压无影响,不需要改变驱动信号的边沿位置。
4)桥臂电流在一个开关周期存在过零点,同时有电流峰值在零区域之内,即上升沿或者下降沿时刻对应的桥臂电流处于零区域之内。此时桥臂电流在死区时间段内续流极有可能产生零电流钳位现象,这种情况很难实现桥臂电压的准确补偿,同时零电流钳位现象也会对共模电压的消除产生影响。
零电流钳位的消除需要针对其产生的条件考虑,即死区时间段内桥臂峰值电流处于零区域之内才有可能产生零电流钳位。如果运用PWM自由度改变桥臂电流的轨迹而将死区时间段对应的桥臂电流峰值移出零区域之外,则在死区时间段续流时不会产生电流过零现象,从而消除零电流钳位。一般的PWM自由度有变开关频率和载波移相,对于并联零共模算法,变开关频率通过同步改变开关周期进而改变各桥臂电流轨迹,可以实现电流峰值的幅值变化;而载波移相在使用时需要保证所有PWM信号的相对位置不变,即不能改变PWM信号的边沿位置的对应关系。以载波移相为例说明其消除零电流钳位的原理,图7-72为A相两个桥臂不移相和同步移相下的PWM波形和电流轨迹对比,其中图7-72a为PWM信号同步左移情况,图7-72b为PWM信号同步右移情况。

图7-72 载波移相实现桥臂电流退出零电流区域的原理
a)PWM信号同步左移 b)PWM信号同步右移
以图7-72a为例,当预测出A2桥臂电流从电流正区域穿过电流零区域时,将所有PWM信号左移,则电流纹波的峰值发生变化,可以计算出所需的移相占空比,保证电流纹波峰值处于电流正区域而不穿过零区域,则此时补偿死区效应可以按照前述的三种无零电流钳位效应的方案进行,图7-72b为桥臂电流从电流零区域穿过电流负区域的情况,采用PWM信号右移可以保证电流纹波的峰值维持在电流负区域。以上通过载波同步移相实现了改变桥臂电流的轨迹,变开关频率同样可以实现这种功能,这里不再赘述。
通过以上的原理分析,确定针对并联逆变器零共模调制算法的死区补偿的方案:首先通过纹波预测和电流采样确定电流轨迹,判断每个开关周期内死区时间对应的电流大小和方向(一般对应电流纹波峰值),然后确定所需死区补偿的类型,判断是否需要通过移相或者变开关频率改变桥臂电流轨迹消除零电流钳位现象,最后计算进行死区补偿后所需的PWM占空比和边沿位置。依据以上的死区补偿流程,首先进行电流纹波预测的检验,验证电流纹波预测的正确性。图7-73为仿真和预测两种情况的电流纹波对比,可以看出两者的幅值和电流轨迹完全吻合。
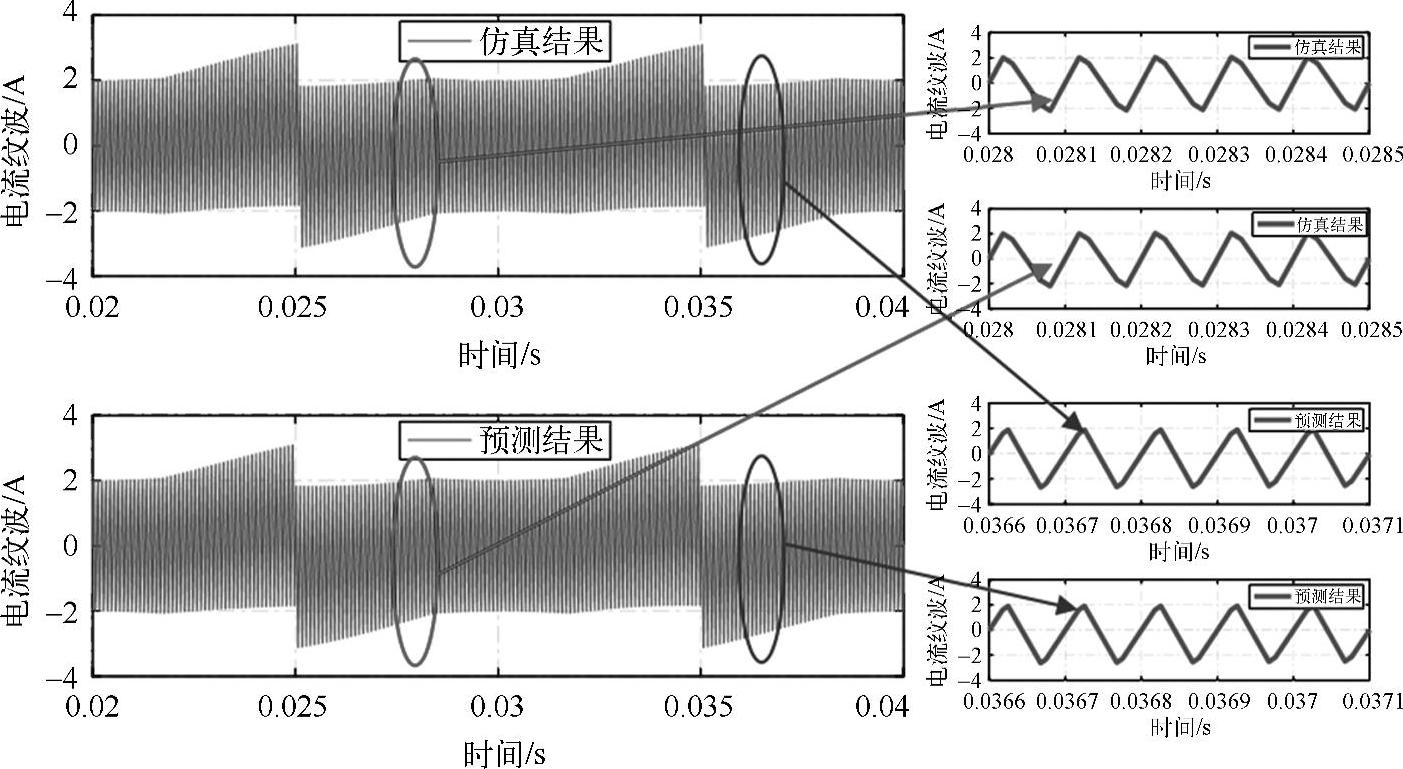
图7-73 仿真和预测的桥臂电流纹波的比较
另外将预测的电流纹波峰值与仿真的电流纹波进行对比,验证通过预测能还原电流的峰值轨迹。图7-74为仿真电流纹波与预测的电流纹波峰值对比,可以看出预测的电流纹波峰值正好包络仿真的电流纹波,说明了预测的电流纹波峰值的有效性,可以运用预测的方法还原桥臂电流轨迹。
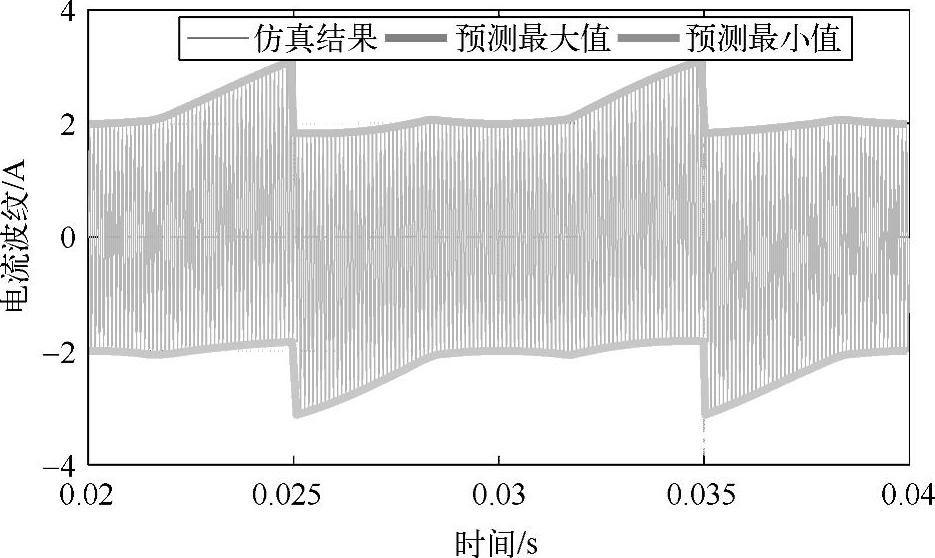
图7-74 仿真提取的桥臂电流纹波和预测的电流纹波峰值的比较
根据以上的思路进行仿真,比较和验证死区补偿的可行性。首先对比有死区时间和无死区时间的共模电压波形,其结果如图7-75所示。可以看出在无死区时间的情况下,共模电压在整个基波周期内一直保持为零;而在有死区时间的情况下,共模电压不能一直保持为零,而是存在一些短时共模电压脉冲,一种共模电压脉冲持续时间是死区时间长度,幅值为Vdc/6,这是由正常的桥臂电流续流引起的;另外还有一种共模电压脉冲,其持续时间小于死区时间长度,幅值小于Vdc/6,这是由零电流钳位效应产生的。
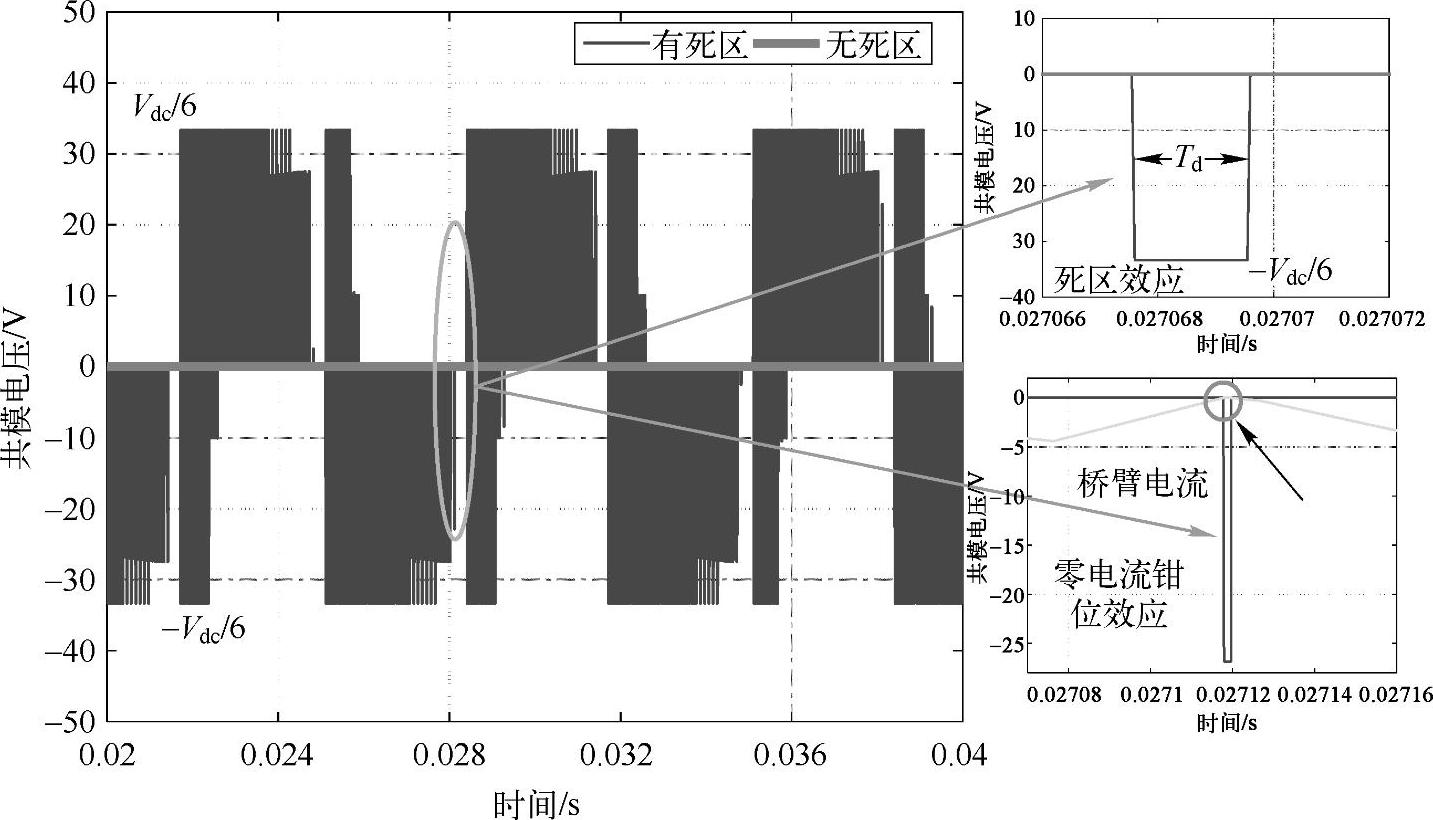
图7-75 有死区时间和无死区时间情况下共模电压的对比分析(见文后彩插)
如果仅通过采样桥臂电流进行死区补偿,无法完全消除共模电压,因为有零电流钳位效应的存在,无法通过增加或者减少占空比实现零电流钳位的消除;而如果加入PWM自由度的运用,如在电流过零附近加入变开关频率或者载波同步移相,则可以消除零电流钳位现象,实现共模电压的完全消除,两种方法的仿真结果如图7-76所示。
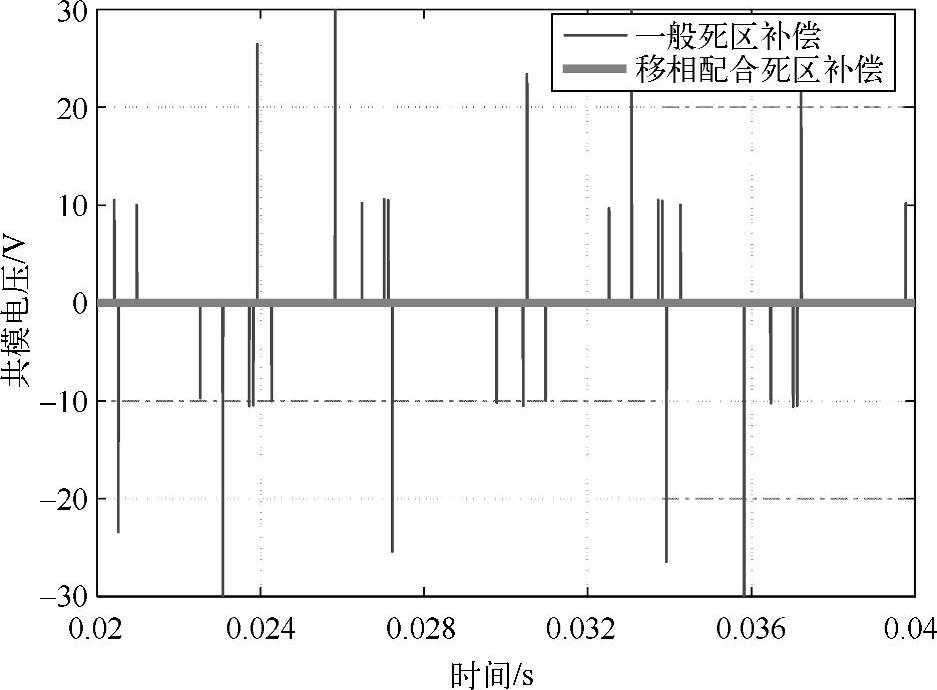
图7-76 一般死区补偿和移相配合死区补偿的共模电压对比
最后通过相电流的频域分析比较死区补偿的效果。死区效应在降低基波电流幅值的同时,主要产生的是6n±1次的低次谐波。如果存在死区而不补偿,则会产生较大的6n±1次谐波;通过一般的死区补偿方法,可以极大程度地降低这种谐波;而在死区补偿的同时配合移相,则可以进一步抑制这种谐波,实现更好的死区补偿效果,原因是消除了零电流钳位的影响,如图7-77所示。
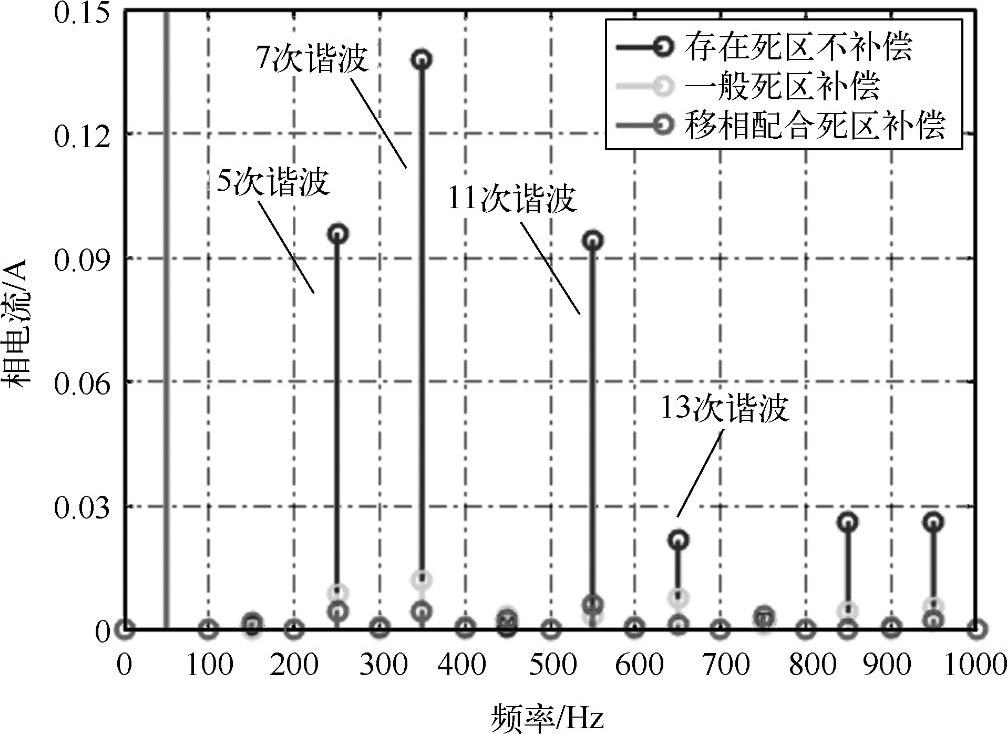
图7-77 有死区、一般死区补偿和移相配合死区补偿的相电流频域对比(见文后彩插)
综上所述,死区时间段内的桥臂电流续流可能改变输出桥臂电压的极性,从而改变桥臂电压的脉冲边沿位置,使其与PWM驱动信号不再同步,最终造成共模电压存在短时脉冲。在实际情况下实现并联逆变器共模电压消除的效果需要考虑死区效应的影响,一般可以采取死区补偿的方法实现大部分共模电压脉冲的消除;而对于由零电流钳位效应产生的共模电压脉冲,传统的死区补偿方法无法消除其对桥臂电压的影响,也无法消除共模电压脉冲,此时需要结合PWM的自由度优化电流轨迹,消除桥臂电流的零电流钳位效应,最终消除由死区时间产生的共模电压,保证并联逆变器零共模调制算法的效果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。