



虽然使用并联逆变器拓扑结构带来了一些好处,但是并联逆变器拓扑结构也存在一些特殊问题,如相间差模环流(Differential-Mode Circulating Current,DMCC)和零序环流(Zero Sequence Circulating Current,ZSCC),其原理如图7-49所示。
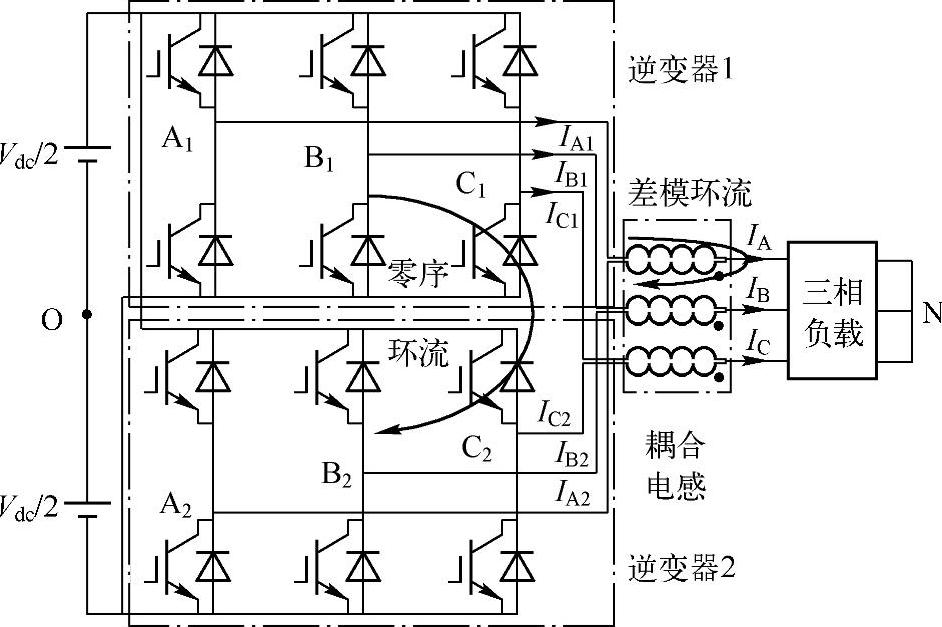
图7-49 并联逆变器带耦合电感的相同差模环流和零序环流原理
其中相间差模环流是耦合电感连接的两个桥臂瞬时电压不相同而在桥臂与耦合电感构成的回路中形成的环流,也为两个并联桥臂的瞬时电流之差,其定义为
Ix_DMCC=Ix1-Ix2 (7-10)
而零序环流是指在不同逆变器之间的环流,反映的是逆变器输出三相电流的正弦度。并联拓扑结构使逆变器之间构成了零序环流的通路,而零序环流产生的原因是零序电压的存在和并联拓扑结构制造的零序电流通路,零序环流的定义为
IZSCC1=IA1+IB1+IC1=-IZSCC2 (7-11)
为了后续分析方便,以参考电压矢量合成计算各有效电压矢量的作用时间t1和t2的大小关系为标准对每个扇区进一步细分,如图7-50所示。以扇区1为例,如果t1>t2,则合成参考电压矢量落在子扇区2的范围内;如果t1<t2,则合成参考电压矢量落在子扇区2的范围内。
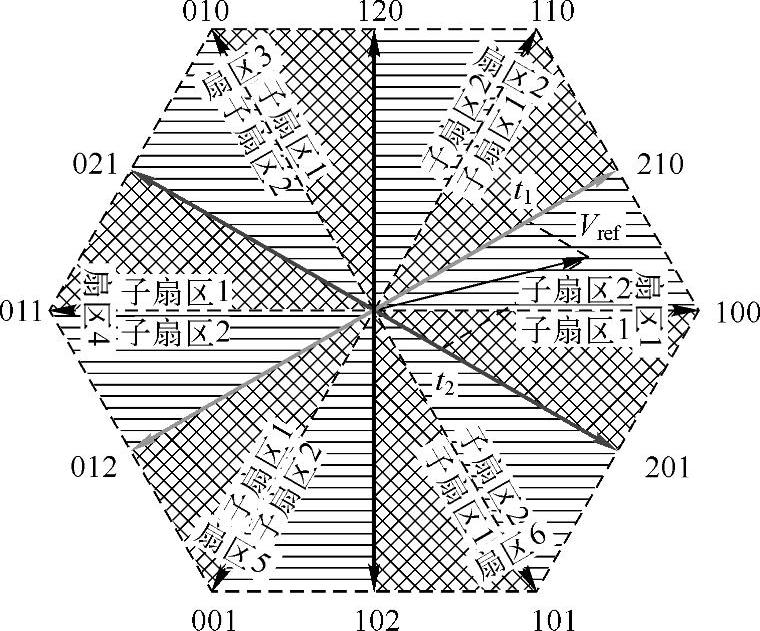
图7-50 并联零共模算法的扇区进一步划分原理
传统的调制方式都是保持PWM在一个开关周期内以开关周期中间时刻对称,而PWM在采用180°载波移相后,这种对称方式不会改变,但是对于并联零共模调制算法,其PWM不一定时刻满足这种关系。以A相并联桥臂的两路PWM为例,根据开关状态表以及t1、t2的大小关系画出其在6个扇区的不同子扇区内的PWM波形,如图7-51所示。

图7-51 并联零共模算法A相在6个扇区不同子扇区内的PWM波形
从图中可以看出,A相的PWM波形除了在扇区1和扇区4保持对称外,在其他4个扇区PWM波形为非对称,造成这种非对称的原因是时间段排列的非对称性,即前后半周期中t1总是排列在t2之前。这种非对称排列会在某些时间段产生桥臂输出伏秒的瞬时不平衡,从而造成桥臂电流的跳变,同时也放大了相间差模环流和零序环流的峰值。对于这种特殊的调制算法,可以分为扇区内部过程和扇区切换过程两种情况进行分析。在扇区内部包括在子扇区之间的过渡时间段,由于没有改变矢量组合的顺序,同时矢量持续的时间不会突变,则不存在伏秒不平衡问题。而在扇区之间切换过程中,需要分两种情况考虑:第一种是包含有对称扇区情况下的扇区切换;第二种是不存在对称扇区情况下的扇区切换,即均为非对称扇区下的扇区切换。第一种情况可以再细分为由不对称扇区进入对称扇区以及对称扇区进入不对称扇区两种状态,此时选择扇区1为对称扇区可以推出两个扇区切换时间段的PWM波形,如图7-52所示。
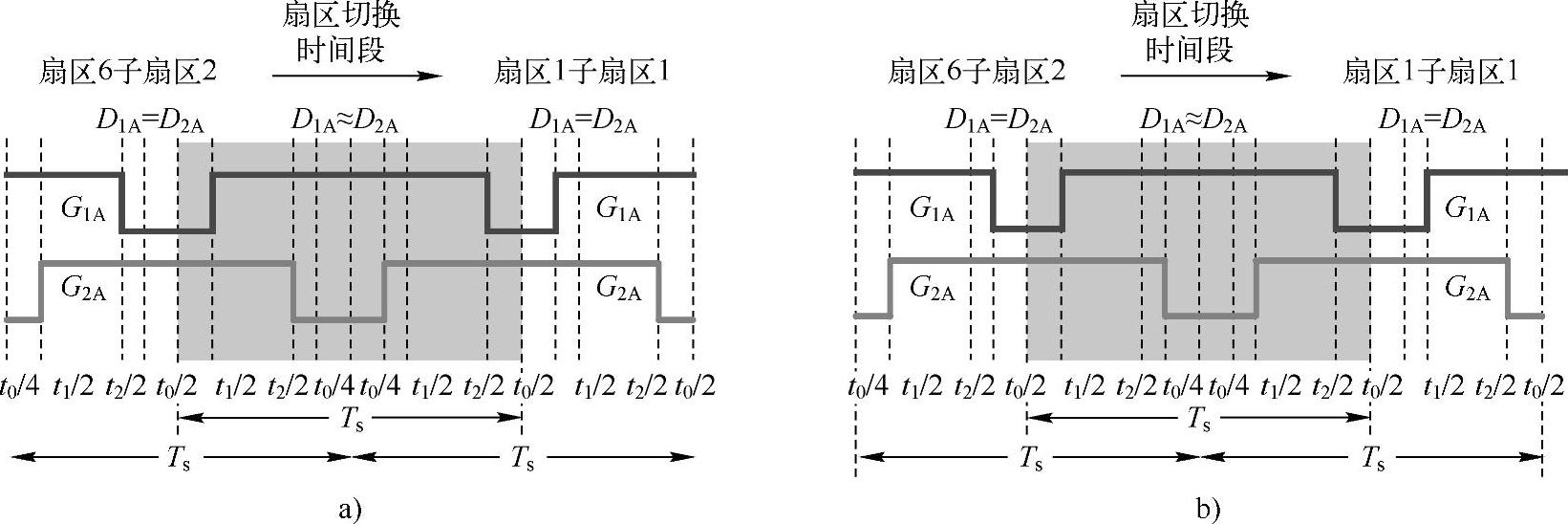
图7-52 A相PWM信号的扇区切换情况
a)不对称扇区进入对称扇区 b)对称扇区进入不对称扇区
可以发现并联桥臂在以上的扇区切换下不存在明显的伏秒不平衡,不会带来桥臂电流的跳变。而考虑并联零共模算法在一个基波周期内所有不对称扇区之间切换的组合,存在两种情况,其过渡过程如图7-53所示。
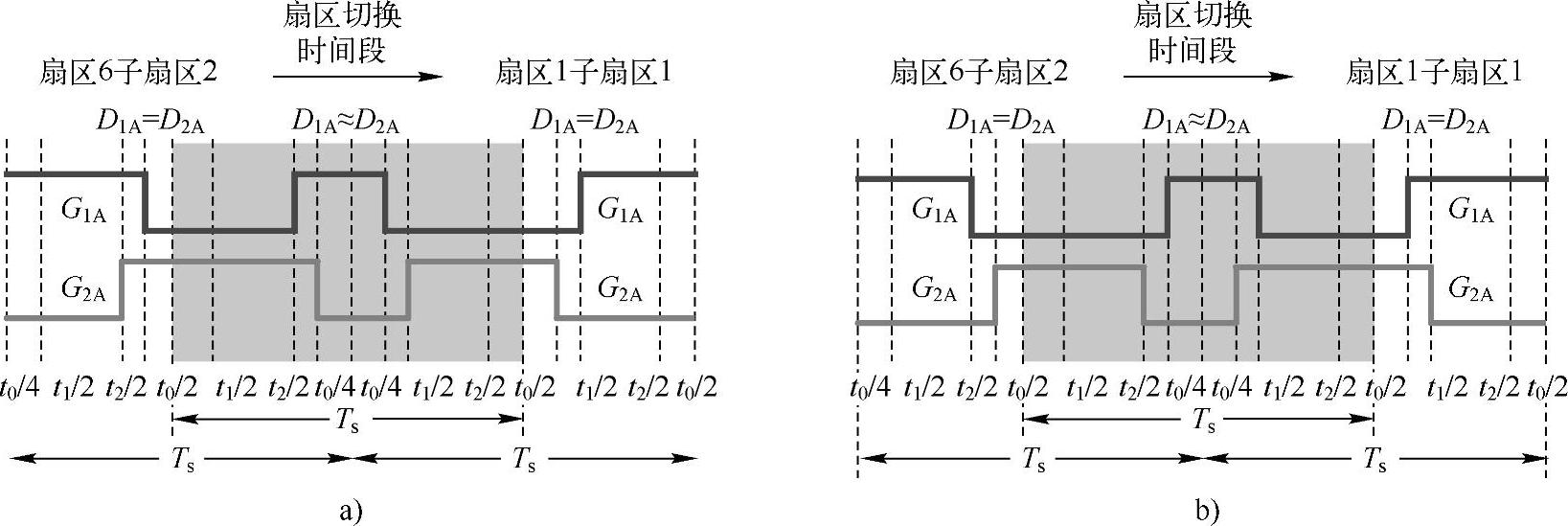
图7-53 A相PWM信号的不对称扇区切换情况
a)不对称扇区2进入不对称扇区3 b)不对称扇区5进入不对称扇区6
可以发现并联桥臂在以上的扇区切换时间段内存在明显的伏秒不平衡,其占空比的差值随着调制比的增大而变大,带来的影响是高调制比下的桥臂电流跳变和相间差模电流的峰值放大。此时可以考虑并联逆变器的自由度来抑制桥臂电流的跳变,同时抑制相间差模环流。对于并联零共模PWM,由于对应的并联桥臂在一个开关周期内的占空比相同,则信号互换后不影响桥臂在一个开关周期内的平均伏秒输出;而在不对称扇区内并联桥臂的PWM前后半周期占空比不同,如果考虑在不对称扇区进行PWM信号互换,则可以改变桥臂在前后半周期的瞬时伏秒输出,可以利用这种特性改善不对称扇区切换时间段内的瞬时伏秒不平衡问题,其原理如图7-54所示。

图7-54 A相PWM信号的不对称扇区信号互换原理
a)不对称扇区2进入不对称扇区3 b)不对称扇区5进入不对称扇区6
分析可以发现在扇区切换的前后一个周期进行信号互换可以实现在扇区过渡时间段内并联桥臂的伏秒输出平衡,从而可以抑制桥臂电流的跳变,也可以抑制相间差模电流的峰值,但是此时需要在扇区切换的前后周期过渡过程加入额外的开关动作。图7-55为在一个基波周期内信号输出情况以及进行信号互换的时刻,可以推出,使用该方法时,A相在一个基波周期内只需要增加4次开关动作,其增加的开关损耗在开关频率较高时基本可以忽略。根据图7-55可以看出,两次进行信号互换的间隔时间为半个基波周期,所以这种方法可以命名为半周期信号互换方法。
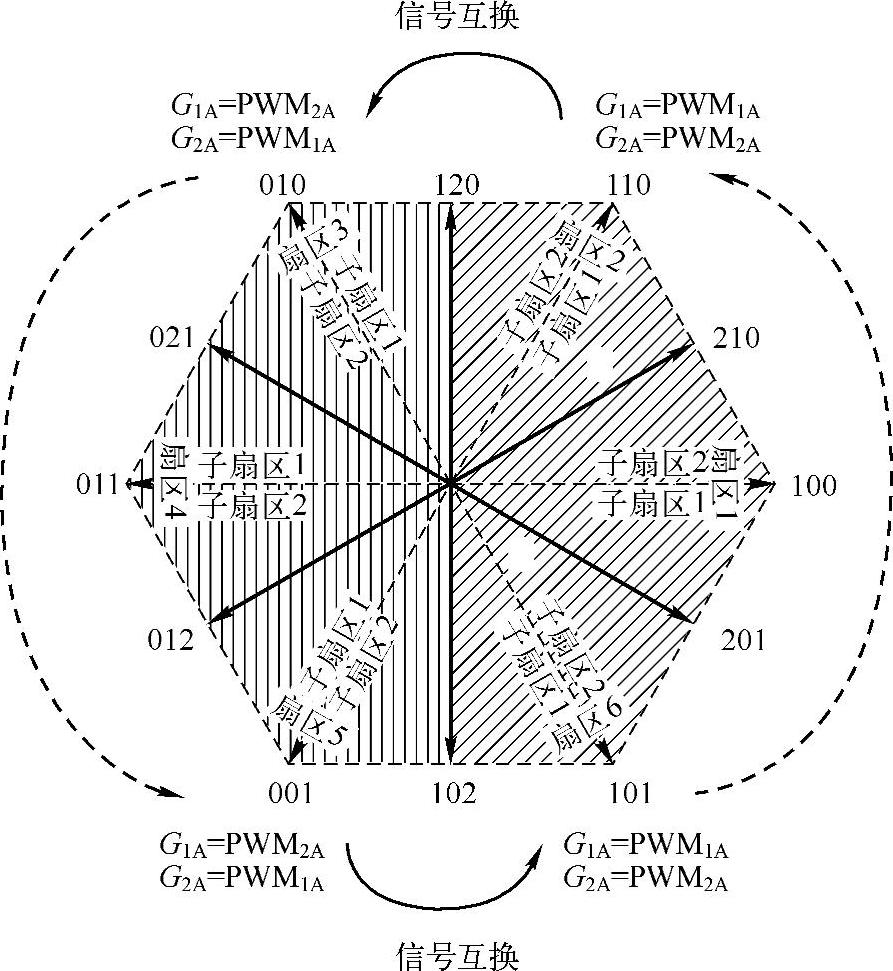
图7-55 并联零共模算法A相在6个扇区的PWM波形
另外,传统SVPWM调制方式中t1和t2在换扇区后交换顺序,能保持所有相的开关动作次数相同的效果。而并联零共模算法在每个扇区中都采用t1超前于t2的时间序列,即只使用了一种时间排列方式,实际并联零共模算法还可以将t1超前于t2的时间序列改为t2超前于t1的时间序列。以扇区1的子扇区2为例,可以分别推出两种时间序列下的所有相的载波比较实现原理以及PWM波形,如图7-56所示。
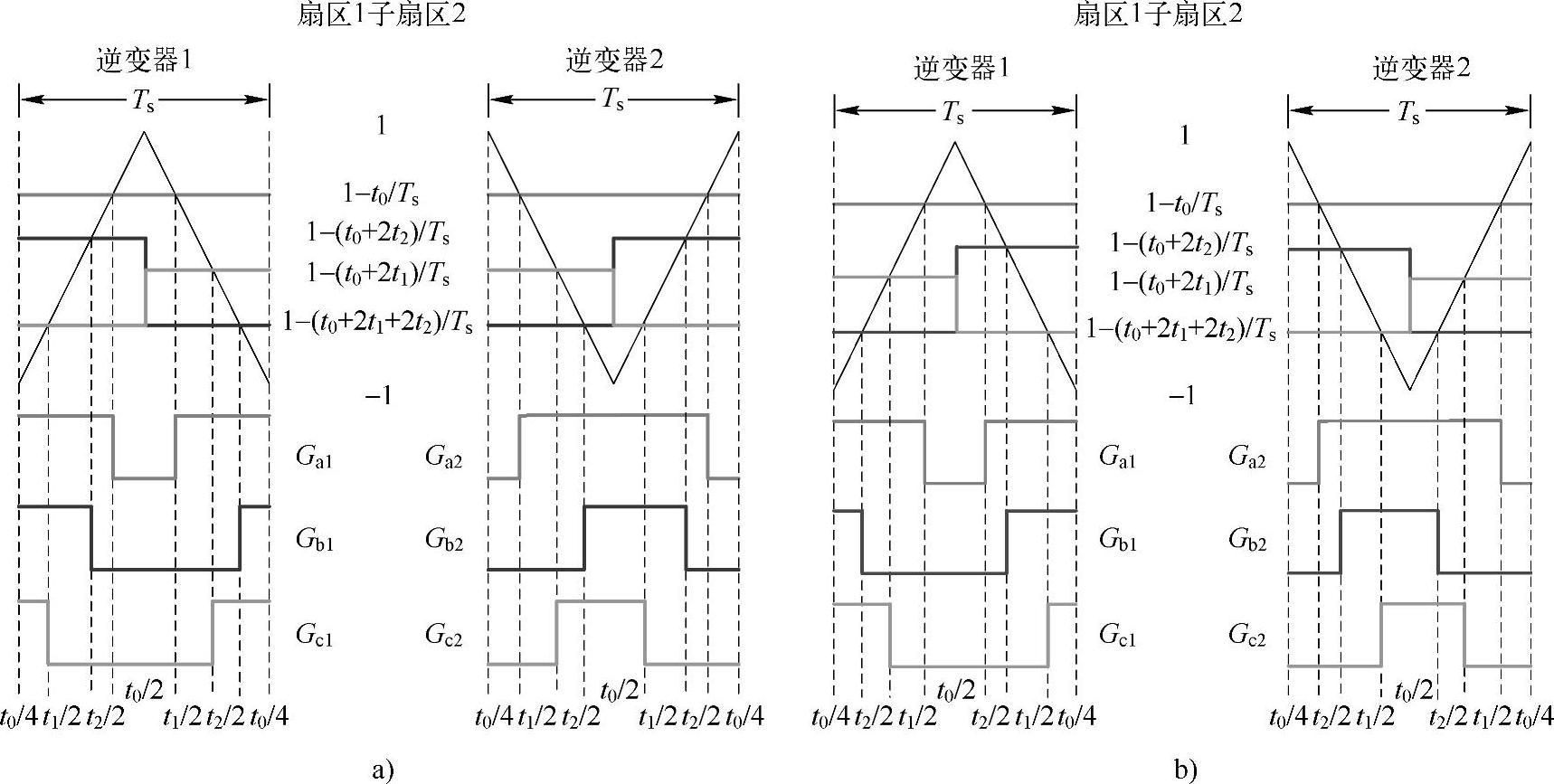
图7-56 并联零共模算法在扇区1的子扇区2中两种不同时间序列的桥臂载波比较原理以及对应的PWM波形
a)t1超前于t2的时间序列 b)t2超前于t1的时间序列
从图7-56a与图7-56b的对比可以看出,两种时间序列的改变是通过互换前后半周期的比较值实现的,其同时也实现了前后半周期的占空比互换的效果,与前述的通过并联桥臂的信号互换的效果类似。由于时间序列的变化针对的是所有相,则需要对所有PWM信号进行调整,而信号互换只需要考虑每相中的两个PWM信号,所以信号互换方法的自由度更高。考虑将该方法在A相两个不对称扇区切换时使用,其原理如图7-57所示。
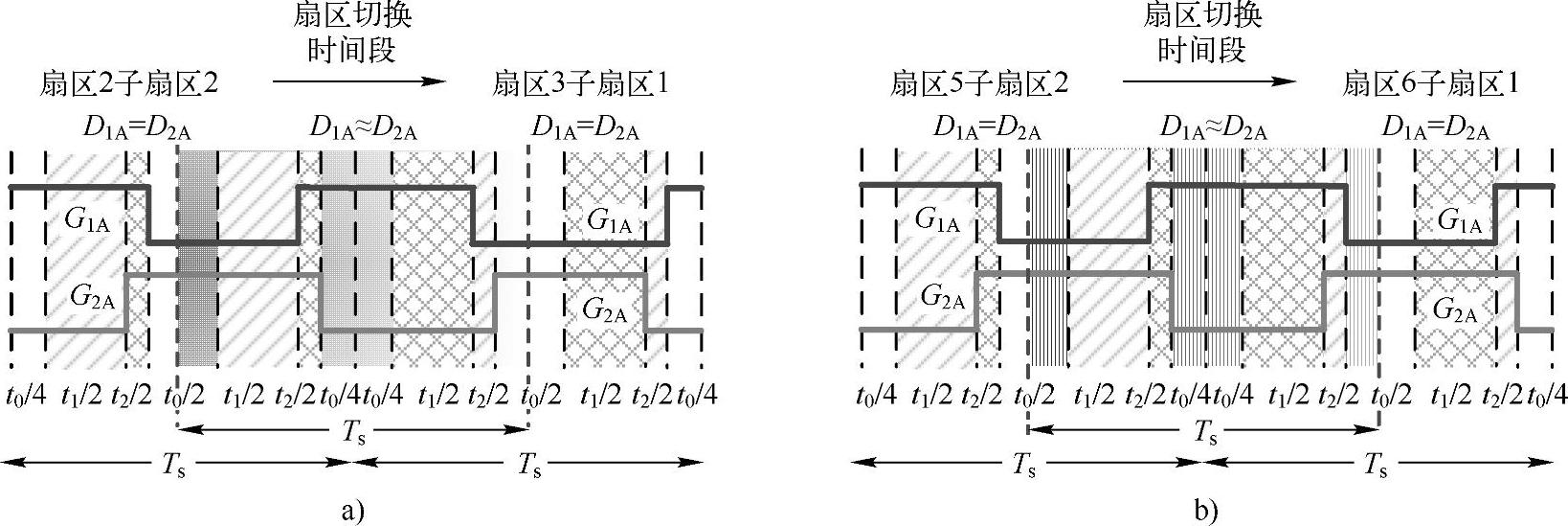
图7-57 A相PWM信号的不对称扇区改变时间序列的原理(https://www.xing528.com)
a)不对称扇区2进入不对称扇区3 b)不对称扇区5进入不对称扇区6
从图7-57可以看出,在不对称的两个相邻扇区使用不同的时间序列可以保证在扇区切换的时间段实现伏秒平衡,从而实现桥臂电流跳变和相间差模电流的抑制效果。另外该方法保证了所有相邻开关周期内的首尾零矢量不变,在改变时间序列时不需要增加额外的开关动作。图7-58为在一个基波周期内时间分段序列的两种方案,其中每个扇区与其临近扇区都选择不同的时间序列,可以实现所有相的桥臂电流跳变以及相间差模电流峰值的抑制效果。
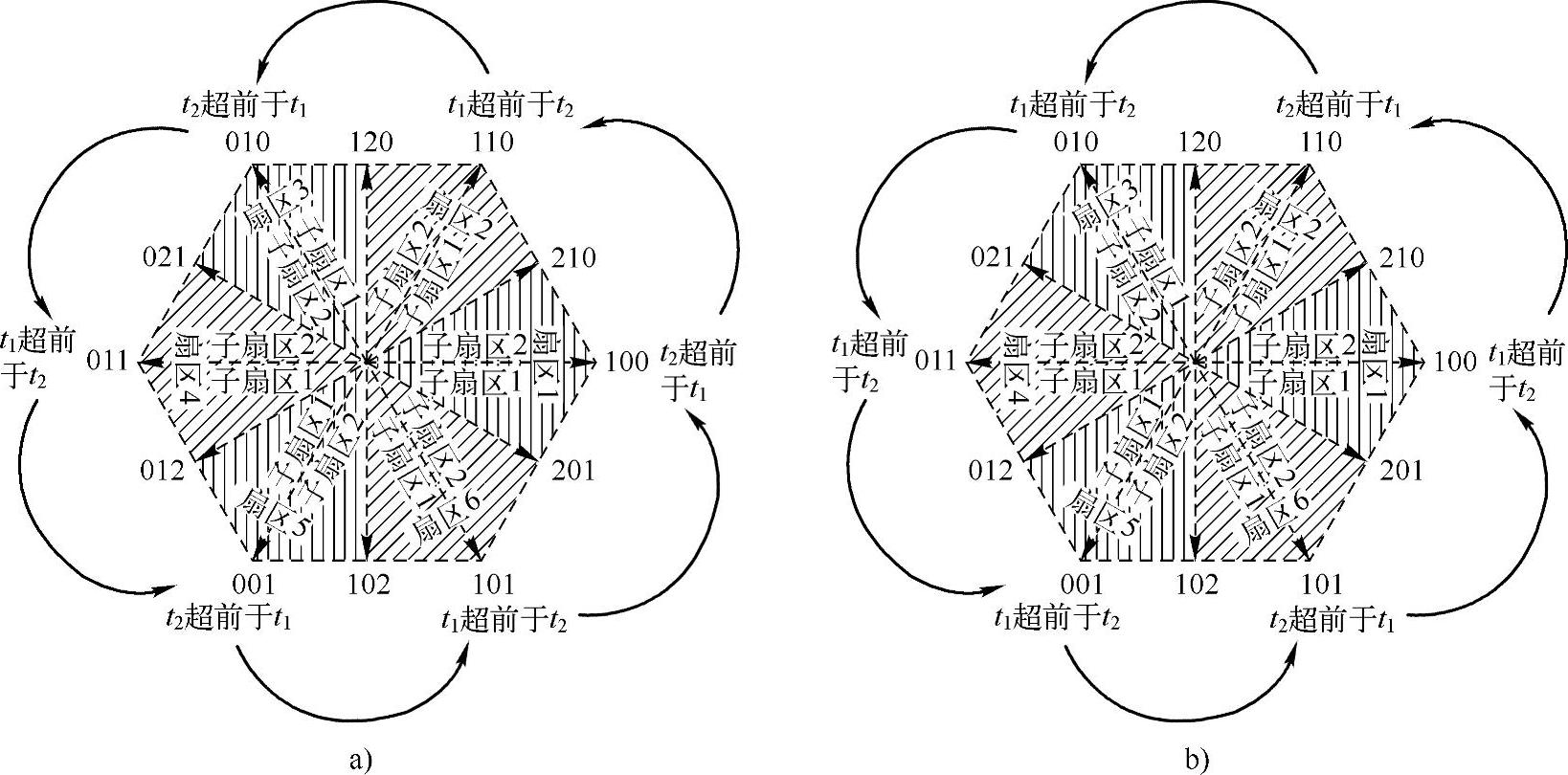
图7-58 并联零共模算法在6个扇区的分段序列的两种方案
a)方案1 b)方案2
最后在原来不对称扇区信号互换的基础上考虑零序电流的抑制,同样可以通过信号互换的方法改变逆变器输出矢量组合来实现。考虑到并联桥臂之间的伏秒平衡,则只能在对称扇区内进行信号互换。以A相为例,考虑PWM信号在扇区1和扇区4的两个子扇区过渡时互换信号,其原理如图7-59所示。可以发现信号互换不会造成瞬时的伏秒不平衡,但是这种方法同样需要加入额外的开关动作。
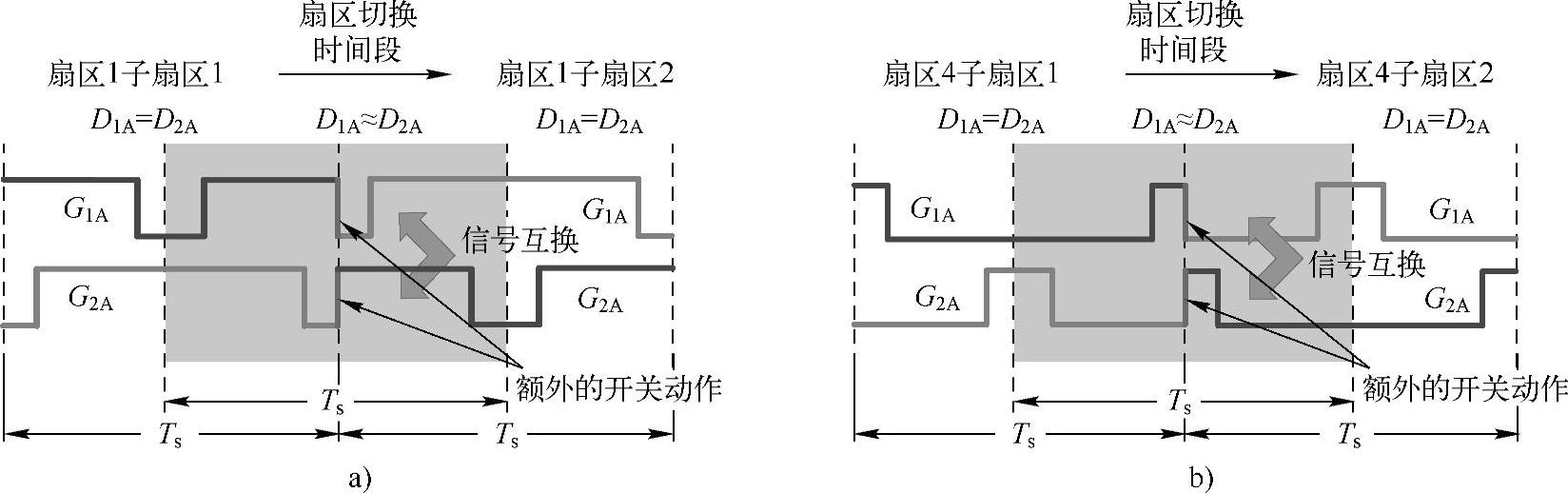
图7-59 A相PWM信号在对称扇区的信号互换原理
a)扇区1中子扇区进入子扇区2 b)扇区4中子扇区进入子扇区2
图7-60为在一个基波周期内的信号输出情况以及需要进行信号互换的时刻,可以计算A相在一个基波周期内需要增加8次开关动作,其增加的开关损耗在开关频率较高时基本可以忽略。根据图7-60可以看出,两次进行信号互换的间隔为1/4个基波周期,所以这种方法可以命名为1/4周期信号互换方法。
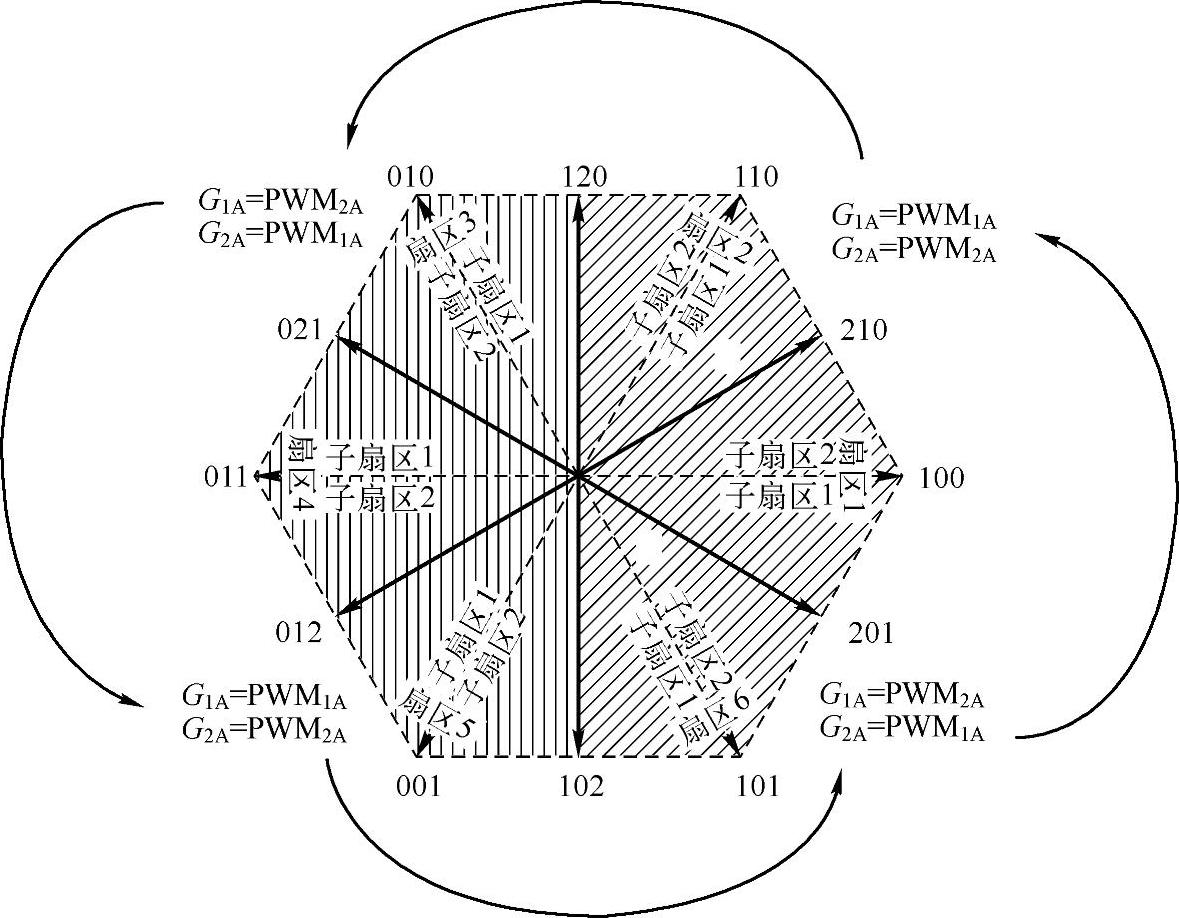
图7-60 并联零共模算法A相在所有扇区的PWM波形方案
将上述的几种改进方法与原始方法进行对比,首先用MATLAB/Simulink建模方法进行仿真验证。图7-61a为仿真情况下原始算法的并联桥臂电流和相电流波形的仿真结果,可以看出在一个基波周期内存在两次电流跳变的情况;图7-61b为原始算法的相间差模环流以及并联逆变器的零序环流的仿真结果,可以看出由于桥臂电流的跳变,导致相间差模环流和零序环流的峰值被放大。
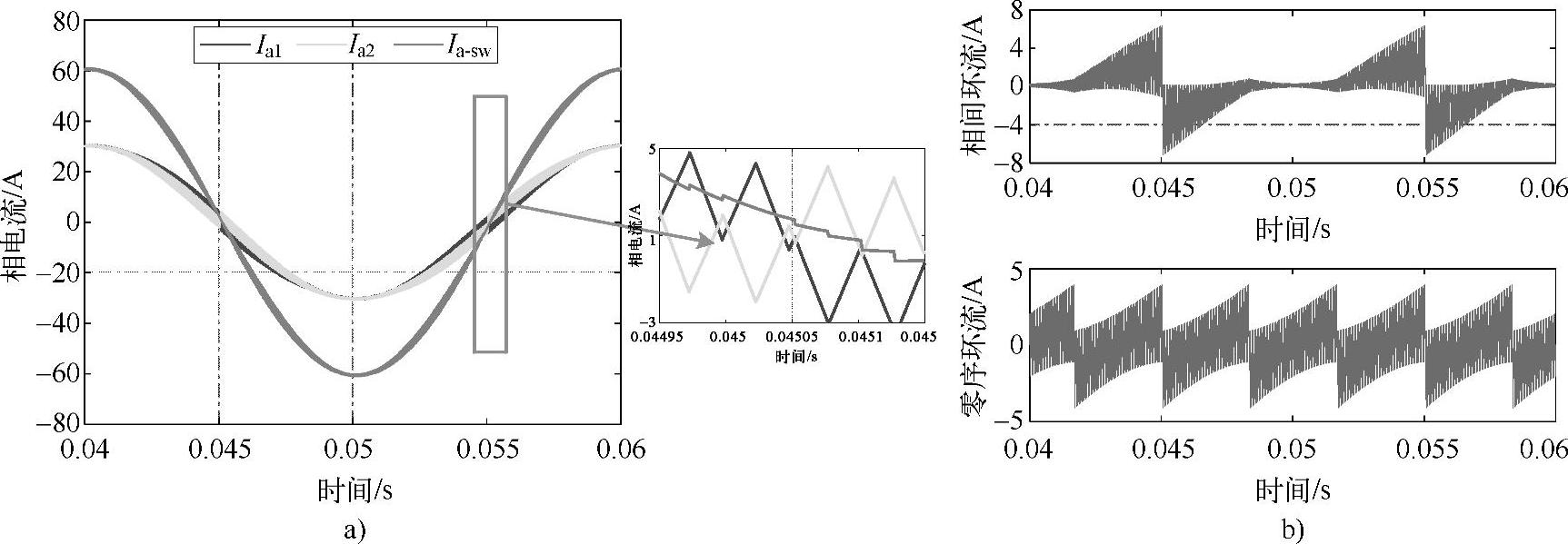
图7-61 原始并联零共模算法的仿真波形
a)并联桥臂电流以及相电流 b)相同差模环流和零序环流
通过在仿真中加入并联桥臂PWM信号的判断逻辑,可以实现半周期信号互换的效果,其波形的仿真结果如图7-62所示。可以看出通过半周期信号互换,可以抑制桥臂电流跳变,同时减小相间差模环流和零序环流的峰值。
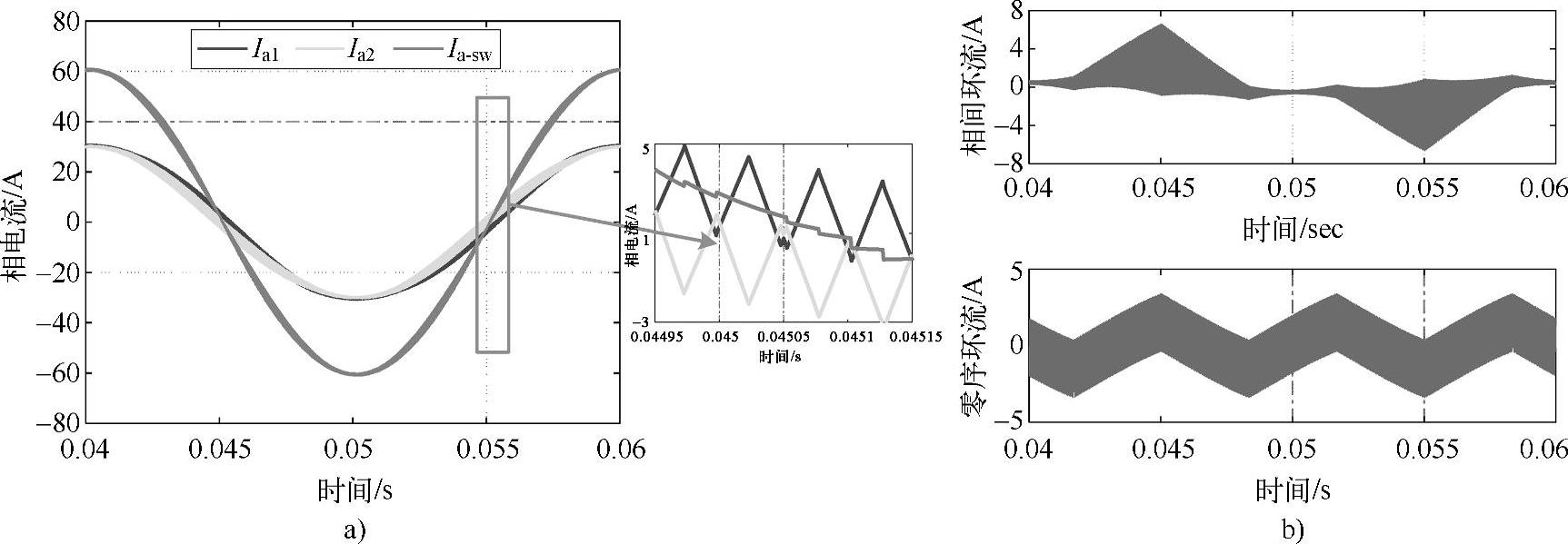
图7-62 半周期信号互换算法的仿真波形
a)并联桥臂电流以及相电流 b)相间差模环流和零序环流
通过在仿真中加入前后半周期比较值互换的判断逻辑,可以实现在换扇区时改变时间序列的效果,其波形的仿真结果如图7-63所示。可以看出通过半周期信号互换,可以实现桥臂电流跳变的抑制,同时减小相间差模环流的峰值,但是这种改进方法对零序环流的峰值基本无影响。
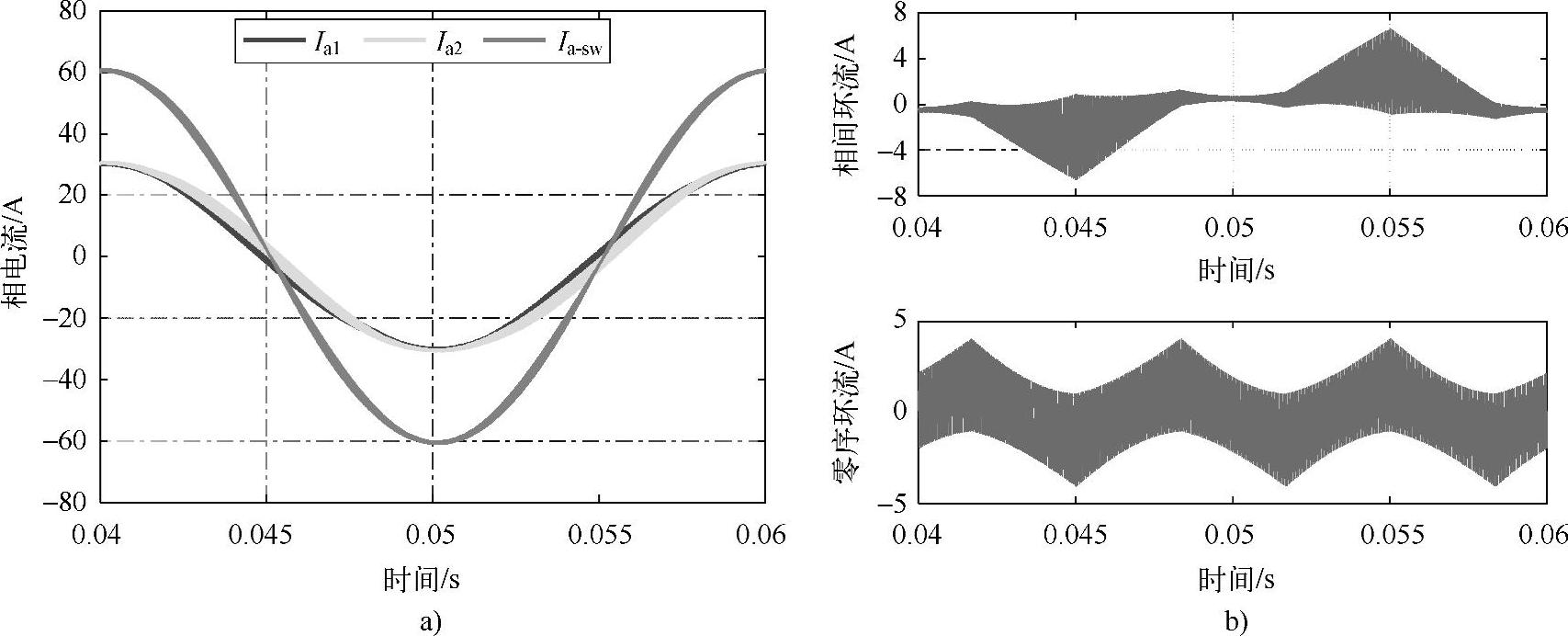
图7-63 换扇区改变时间序列算法的仿真波形
a)并联桥臂电流以及相电流 b)相间差模环流和零序环流
最后通过在仿真中加入并联桥臂PWM信号在对称扇区的子扇区的判断逻辑,可以实现1/4周期信号互换的效果,其波形的仿真结果如图7-64所示。可以看出通过1/4周期信号互换,可以抑制桥臂电流跳变,同时减小相间差模环流和零序环流的峰值。
将上述所有算法在实验中进行验证。首先比较桥臂电流跳变的抑制效果,如图7-65所示。可以看出原始算法中存在桥臂电流跳变的现象,而三种改进的算法均能抑制桥臂电流跳变。
其次是比较相间差模环流的抑制效果,如图7-66所示。可以看出原始算法中相间差模环流的峰值最大,则对耦合电感值的要求最高。三种改进的算法均能在一定程度上抑制相间差模环流的峰值。
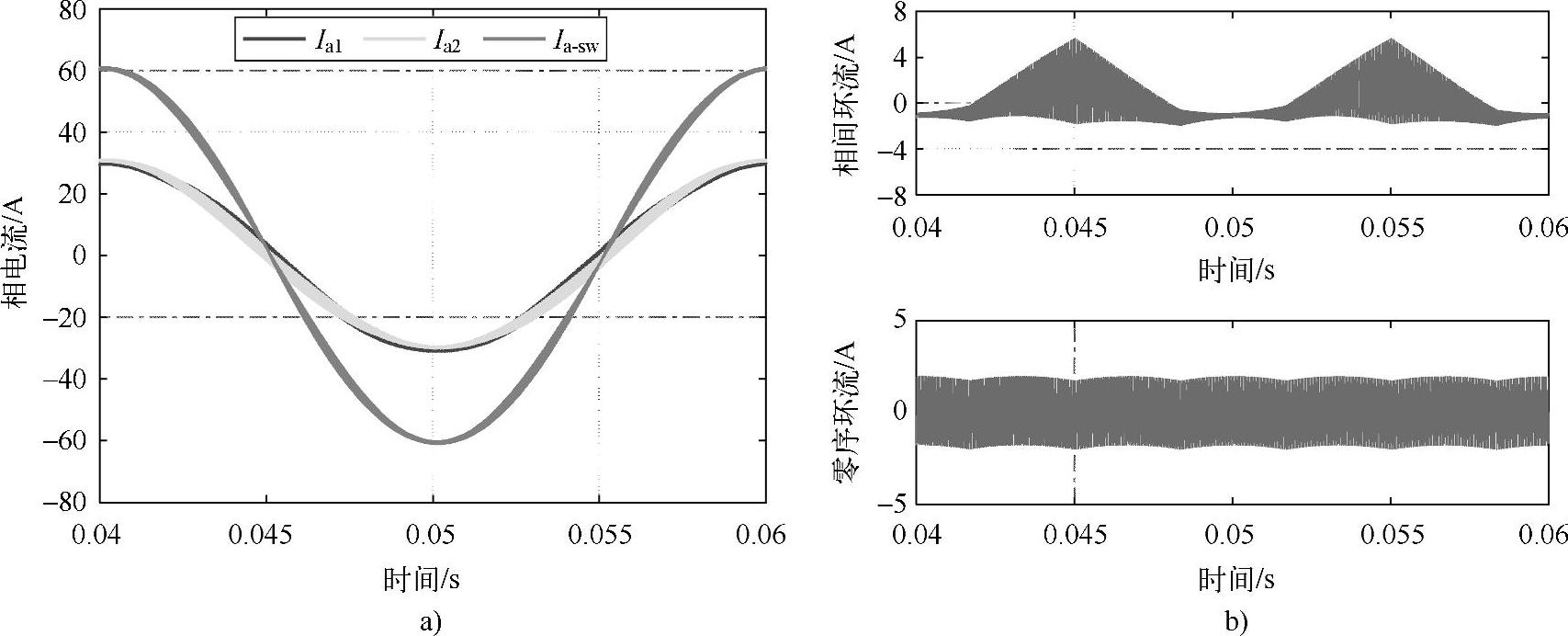
图7-64 1/4周期信号互换算法的仿真波形
a)并联桥臂电流以及相电流 b)相间差模环流和零序环流
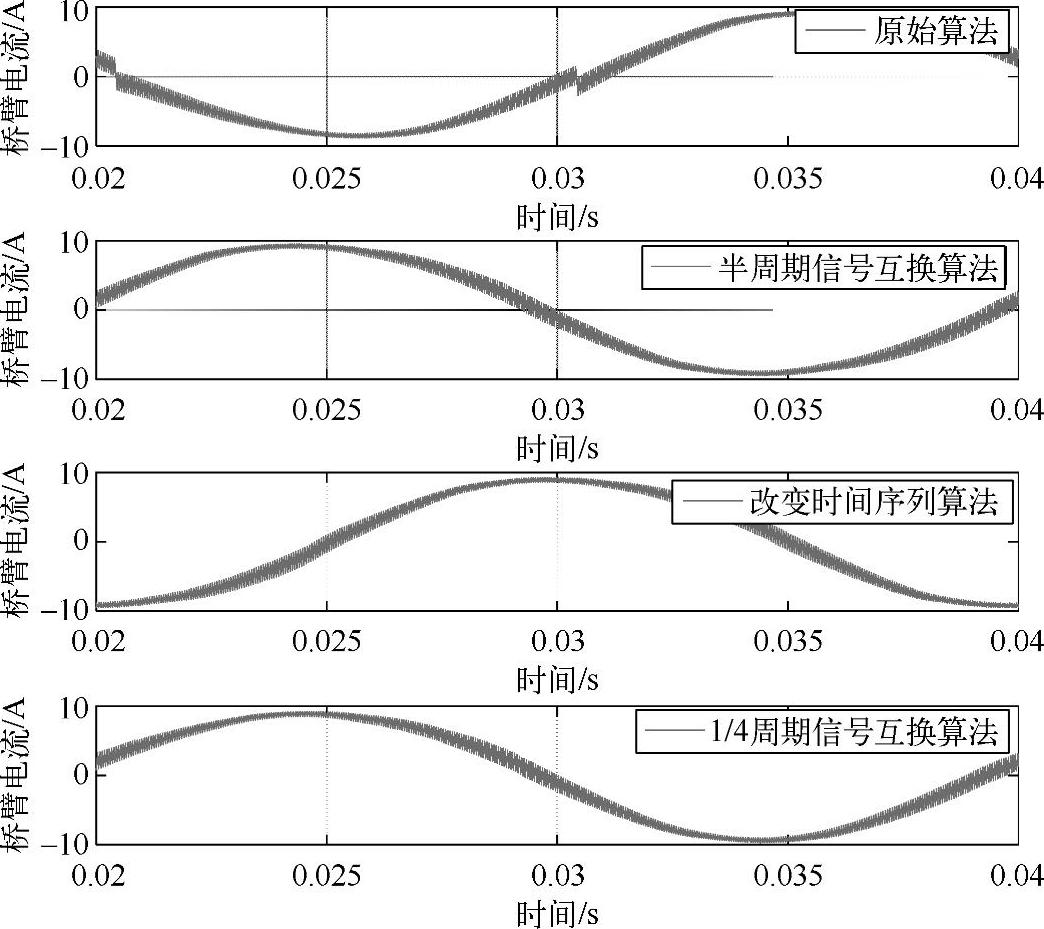
图7-65 并联零共模原始算法与改进算法的桥臂电流波形对比
最后比较零序环流的抑制效果,如图7-67所示。可以看出原始算法中零序环流的峰值最大,换扇区改变时间序列的算法不能实现零序环流的衰减,而信号互换的两种算法均能抑制零序环流峰值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。