



1)打开CoDeSys,新建“Project”。
2)选择“Target setting”,配置PLC版本及类型,如图5-9所示。

图5-9 配置PLC版本及类型
3)创建PLCPRG并选择编程语言ST,如图5-10所示。
4)创建快速任务FPLCPRG并选择编程语言ST,如图5-11所示。
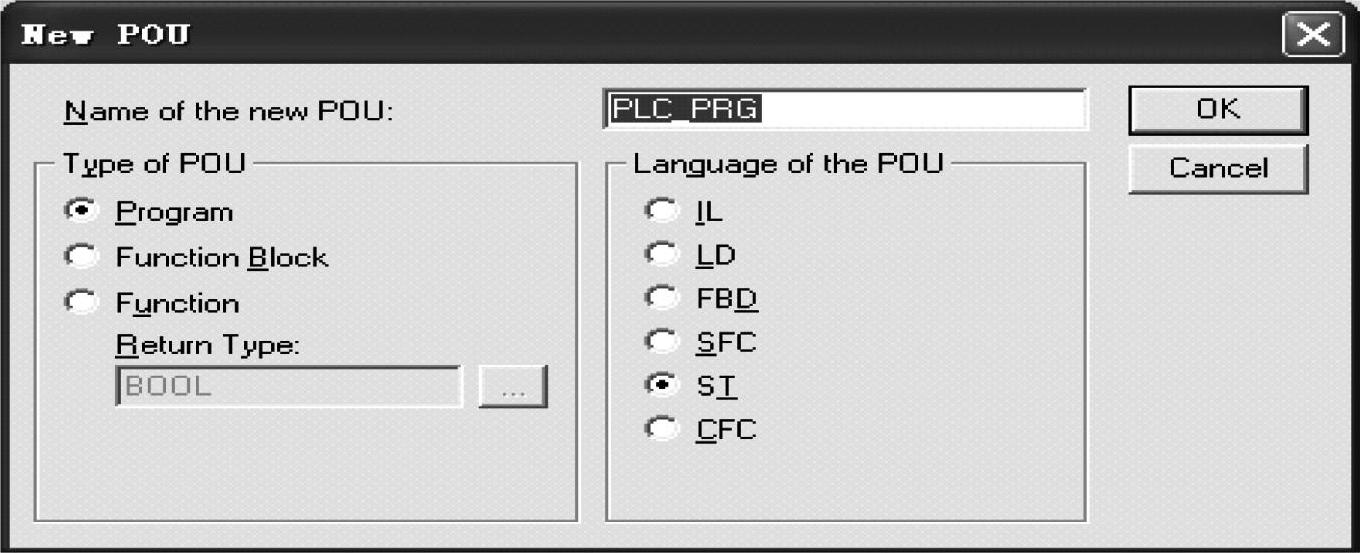
图5-10 创建PLCPRG
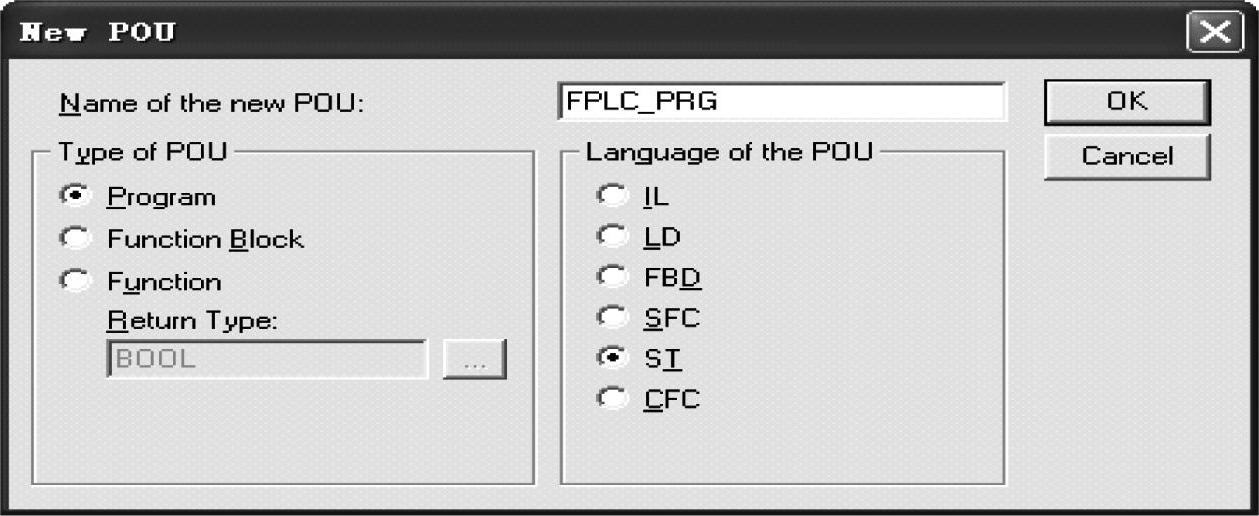
图5-11 创建FPLCPRG
5)创建VIRTUALMASTER功能块,并采用FBD编程语言,如图5-12所示。

图5-12 创建VIRTUALMASTER功能块
6)创建完毕以上程序块并对VIRTUALMASTER功能块编程,如图5-13所示。
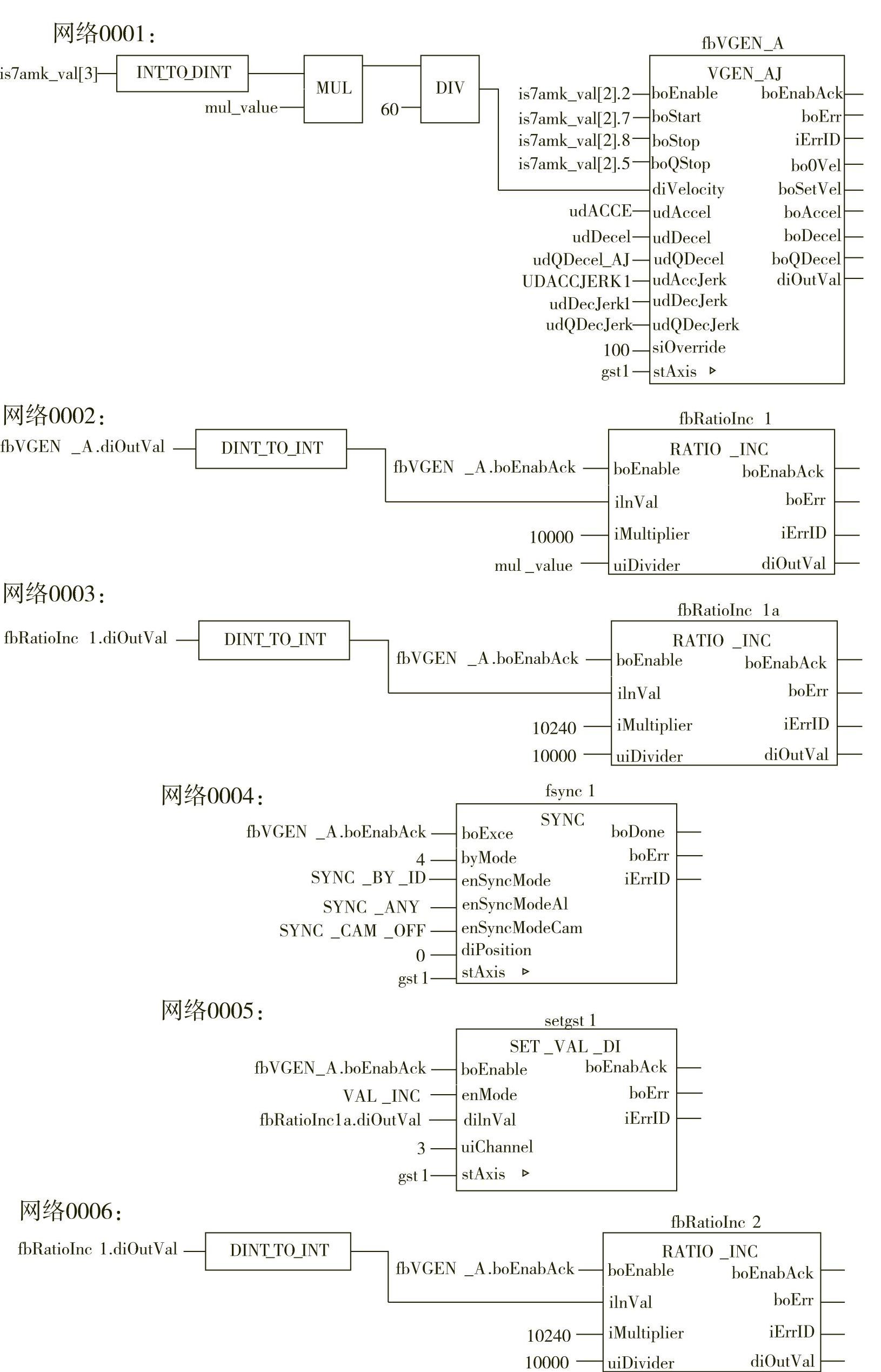
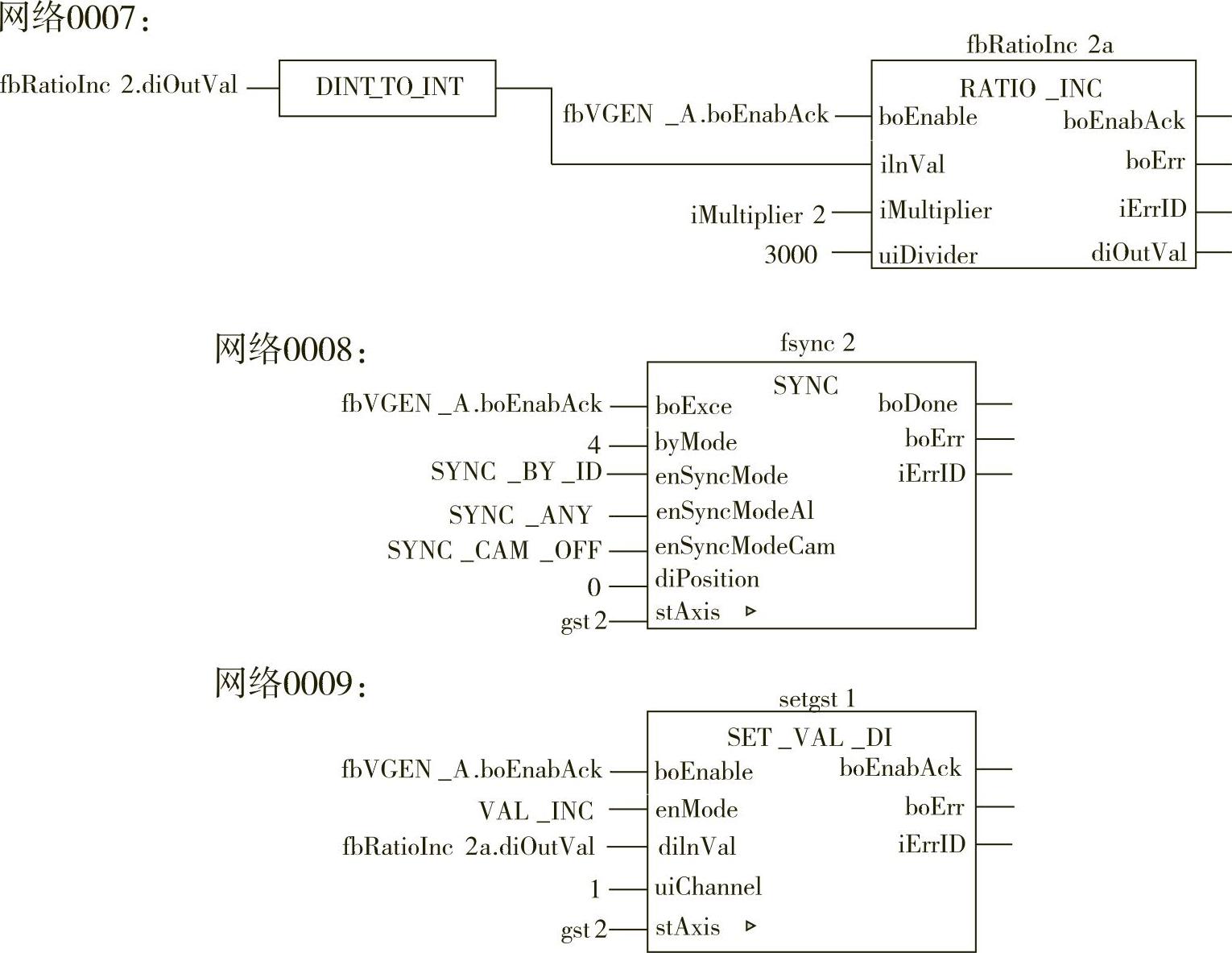
7)VIRTUALMASTER功能块程序代码如下:
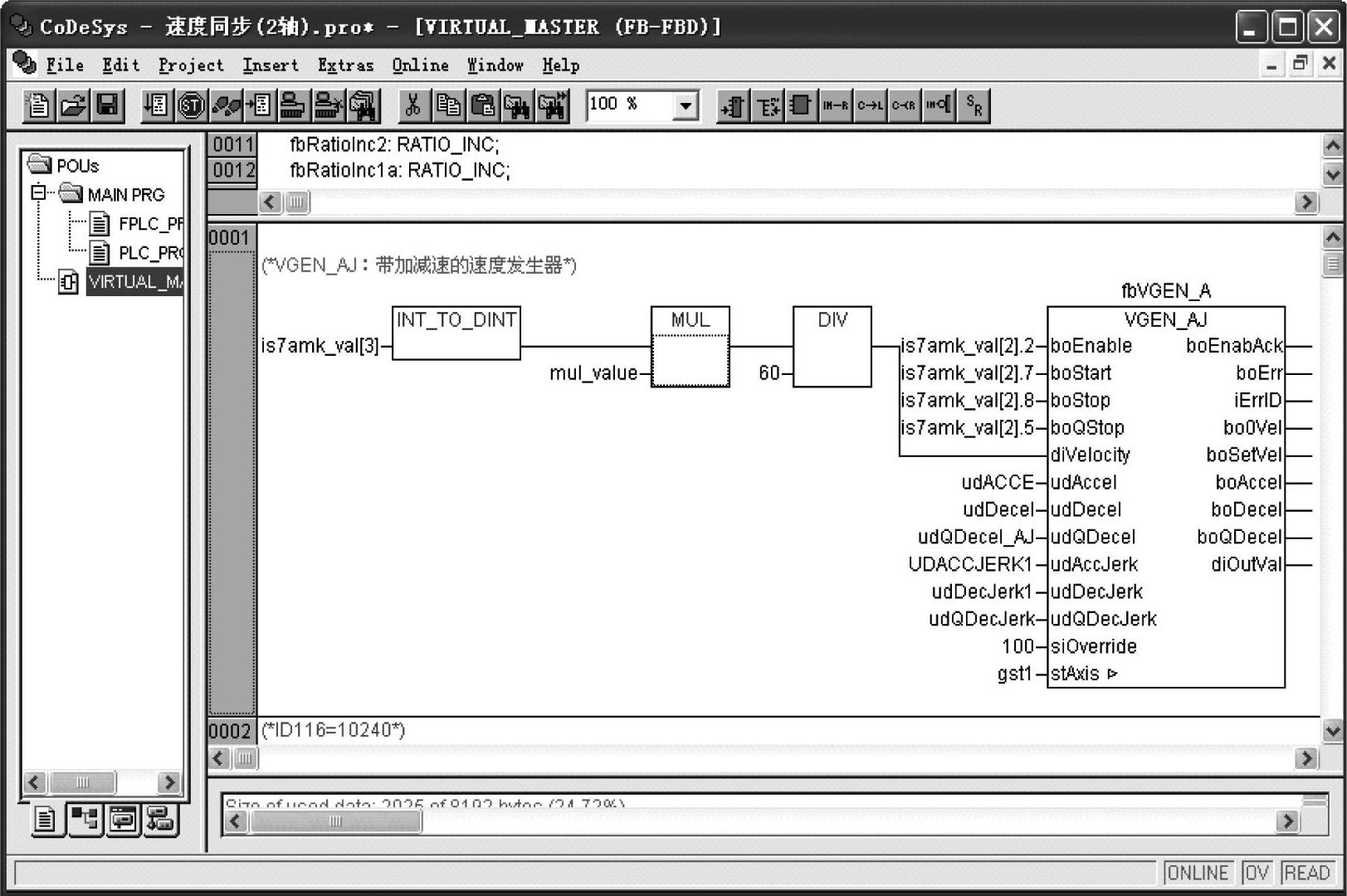
图5-13 对VIRTUALMASTER功能块编程

以下功能块程序说明:网络0001为虚轴速度发生器;网络0002~0005为主轴电动机同步控制程序;网络0006~0009为从轴电动机同步控制程序。
8)在快速任务FPLCPRG中调用VIRTUALMASTER功能块,如图5-14所示。
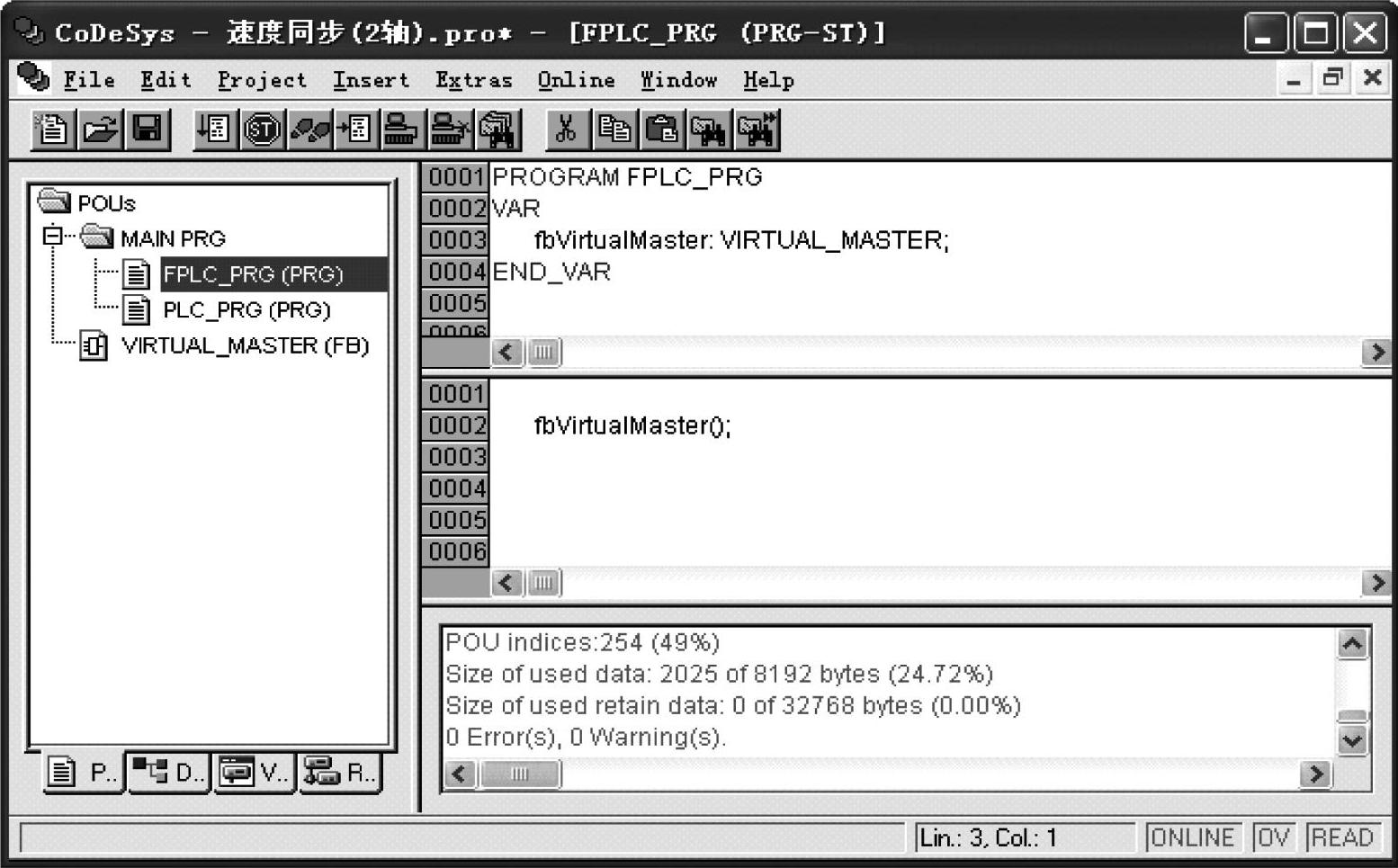
图5-14 在FPLCPRG中调用VIRTUALMASTER功能块
9)在PLCPRG中注册快速任务FPLCPRG,更新主轴gst1结构体,以及设置虚轴VGENAJ的加减速时间,如图5-15所示。
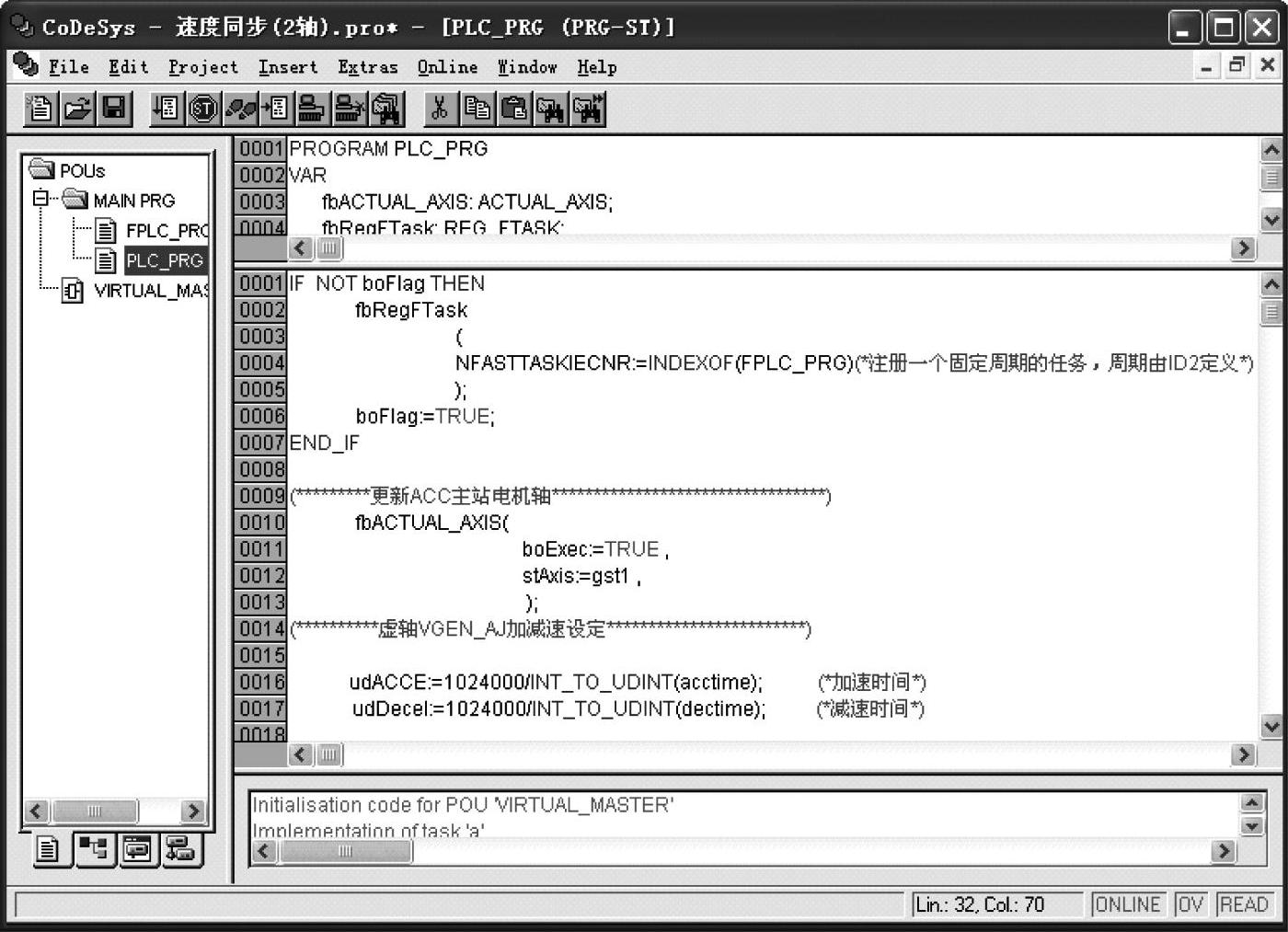
图5-15 在PLCPRG中注册快速任务FPLCPRG等操作
10)在PLCPRG中对主轴电动机及从轴电动机的控制字和状态字进行编程,控制字包括:错误清除CE,使能RF;状态字包括:系统准备就绪SBM,使能反馈QRF,速度反馈值,如图5-16所示。

图5-16 在PLCPRG中对轴的控制字和状态字进行编程
11)在“GlobalVariables”全局变量表中定义电动机轴结构体,如图5-17所示同时定义is7amkval、iamks7val、CycTrigger、udACCE、udDecel变量。(https://www.xing528.com)
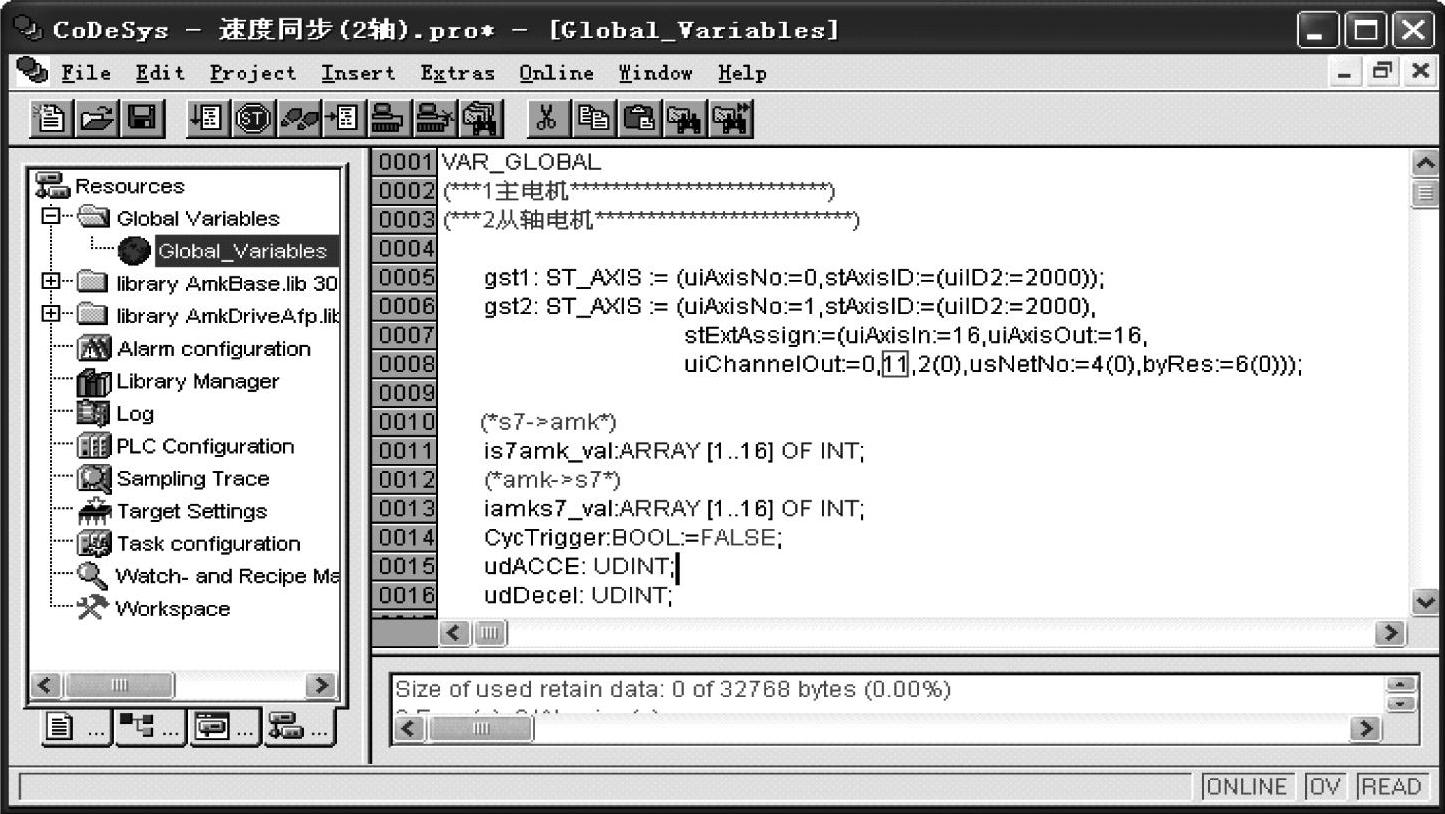
图5-17 “GlobalVariables”全局变量表中定义轴结构体及相关变量(一)
12)在“PLC Configuration”中配置从轴电动机的控制字和状态字,如图5-18所示。需要注意的是,这里的%IW4、%IW5及%QW4需要与AipexPro软件中的Messages定义相一致,如图5-19所示。具体操作参考第4章相关部分。
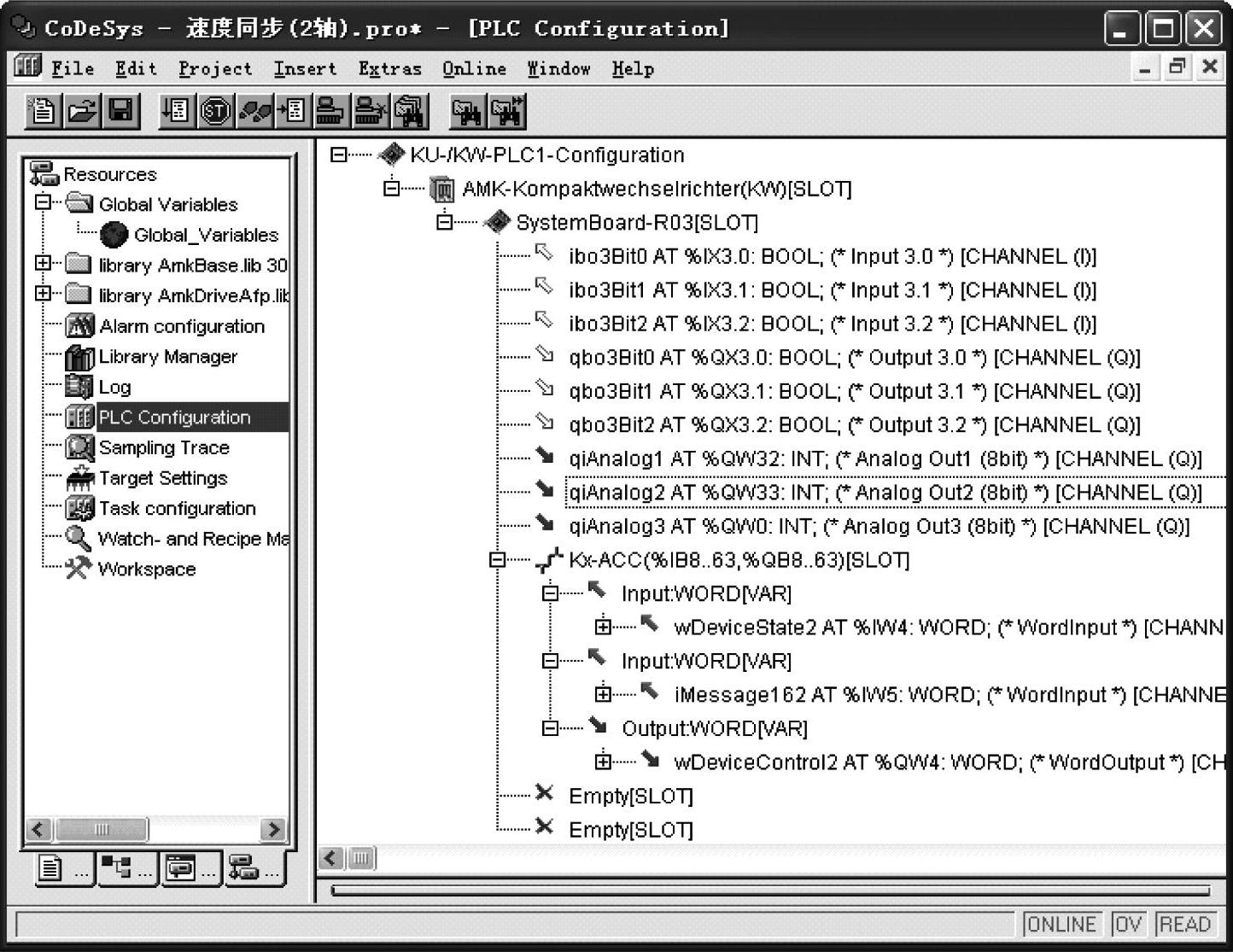
图5-18 “PLC Configuration”中配置从轴电机的控制字和状态字(二)
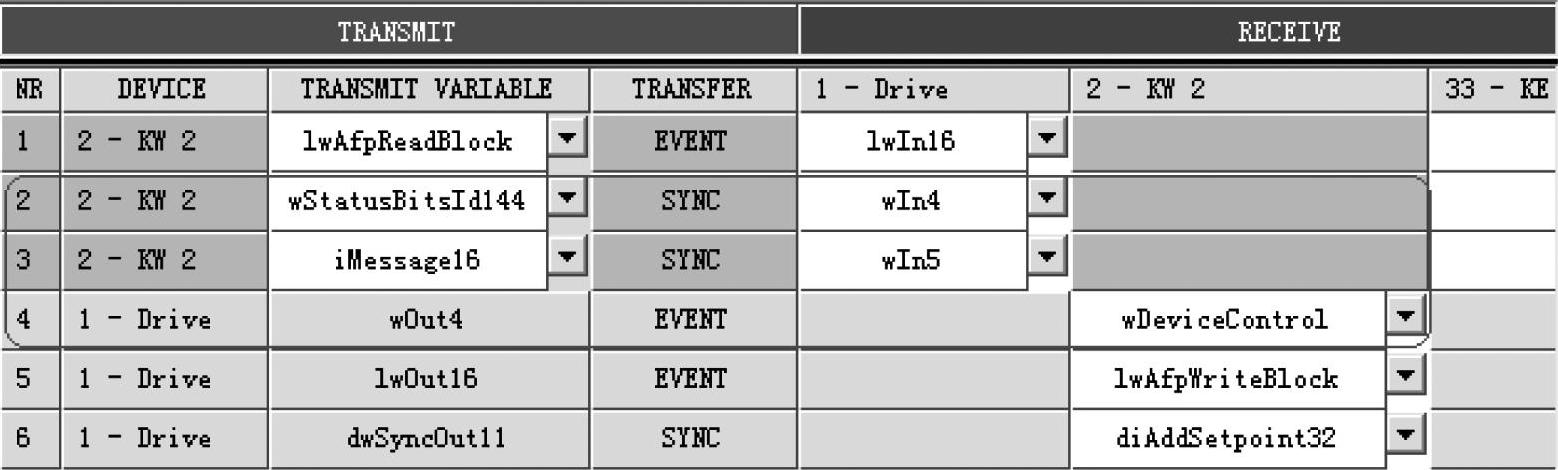
图5-19 AipexPro软件中的Messages配置表
另外,%IW4下面的%IX40定义为boSBM2,%IX41定义为boQUE2,%IX42定义为boQRF2;%QW4下面的%QX40定义为boCleanError2,%IX48定义为boRF2,如图5-20所示。
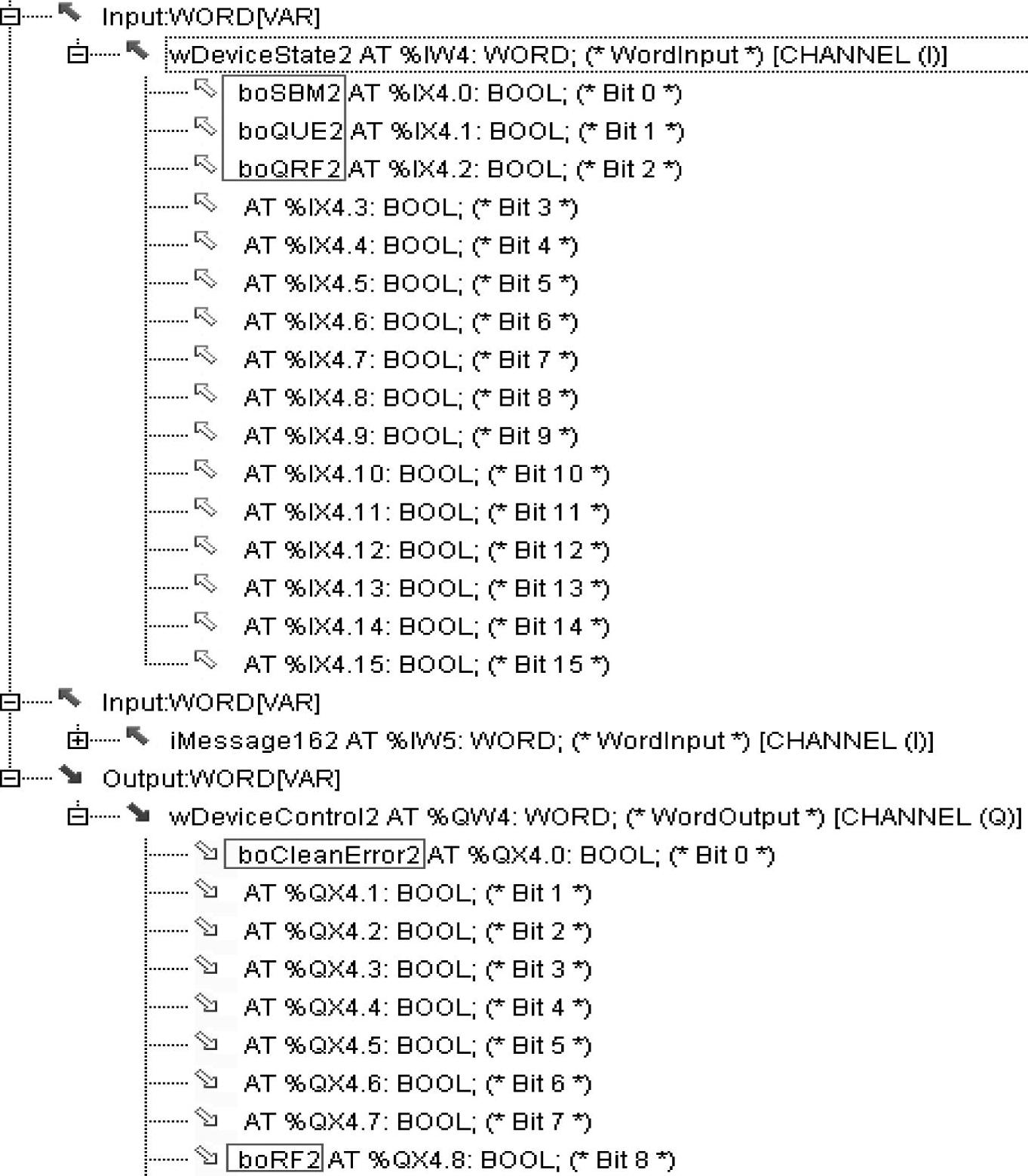
图5-20 “PLC Configuration”中的全局变量声明
13)在“Task Configuration”(任务配置)中配置快速任务FPLCPRG和PLCPRG,如图5-21和图5-22所示。

图5-21 在“Task Configuration”配置FPLCPRG
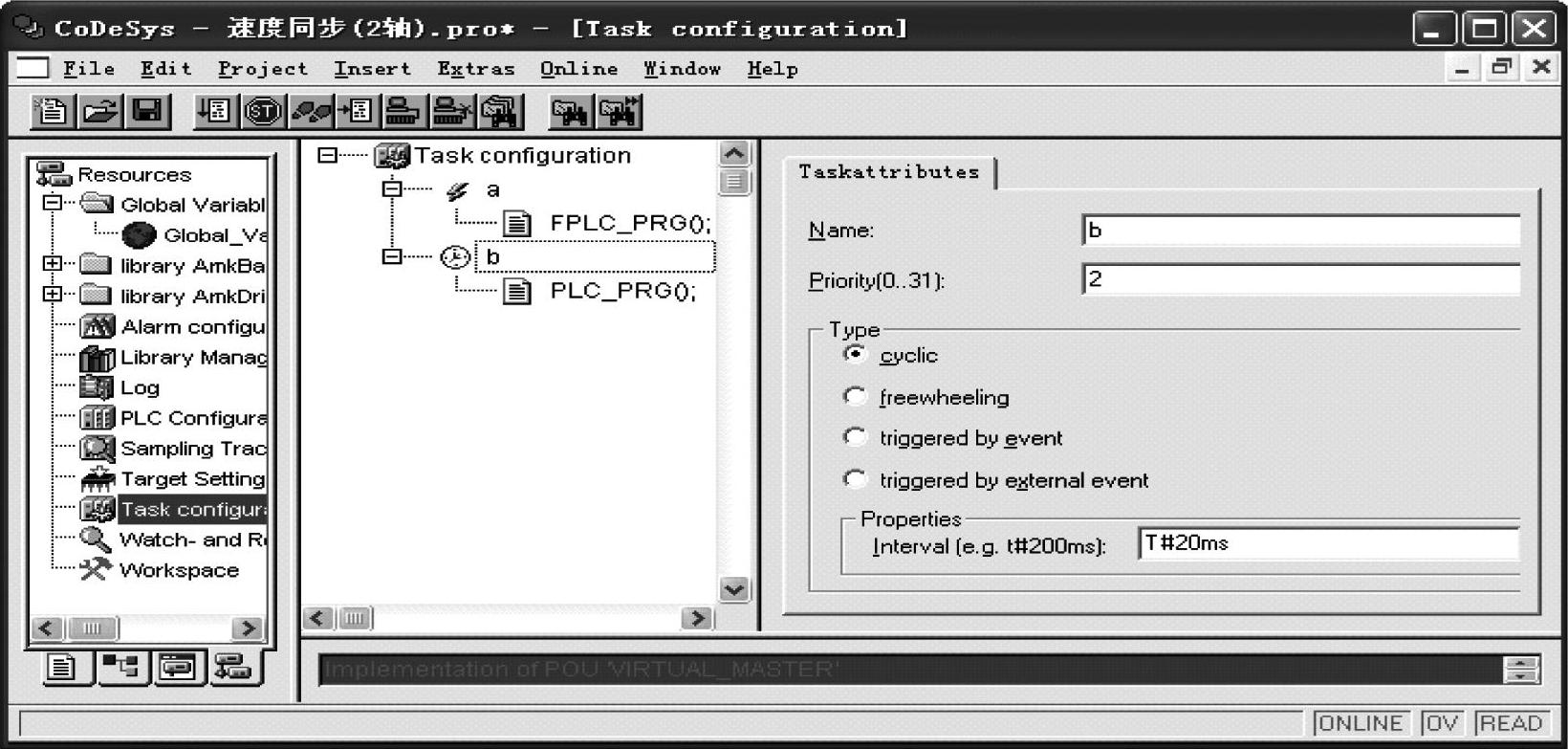
图5-22 在“Task Configuration”中配置PLCPRG
14)在Visualization界面中对2轴进行状态显示及控制,如图5-23所示。
•Master电动机(1轴)
SBM1:gst1stAxisInwSysInf0
QRF1:gst1stAxisInwSysInf8
1#使能:PLCPRGboRFTest1
1#实际速度:iamks7val[3]
Slave电动机(2轴)
SBM2:boSBM2
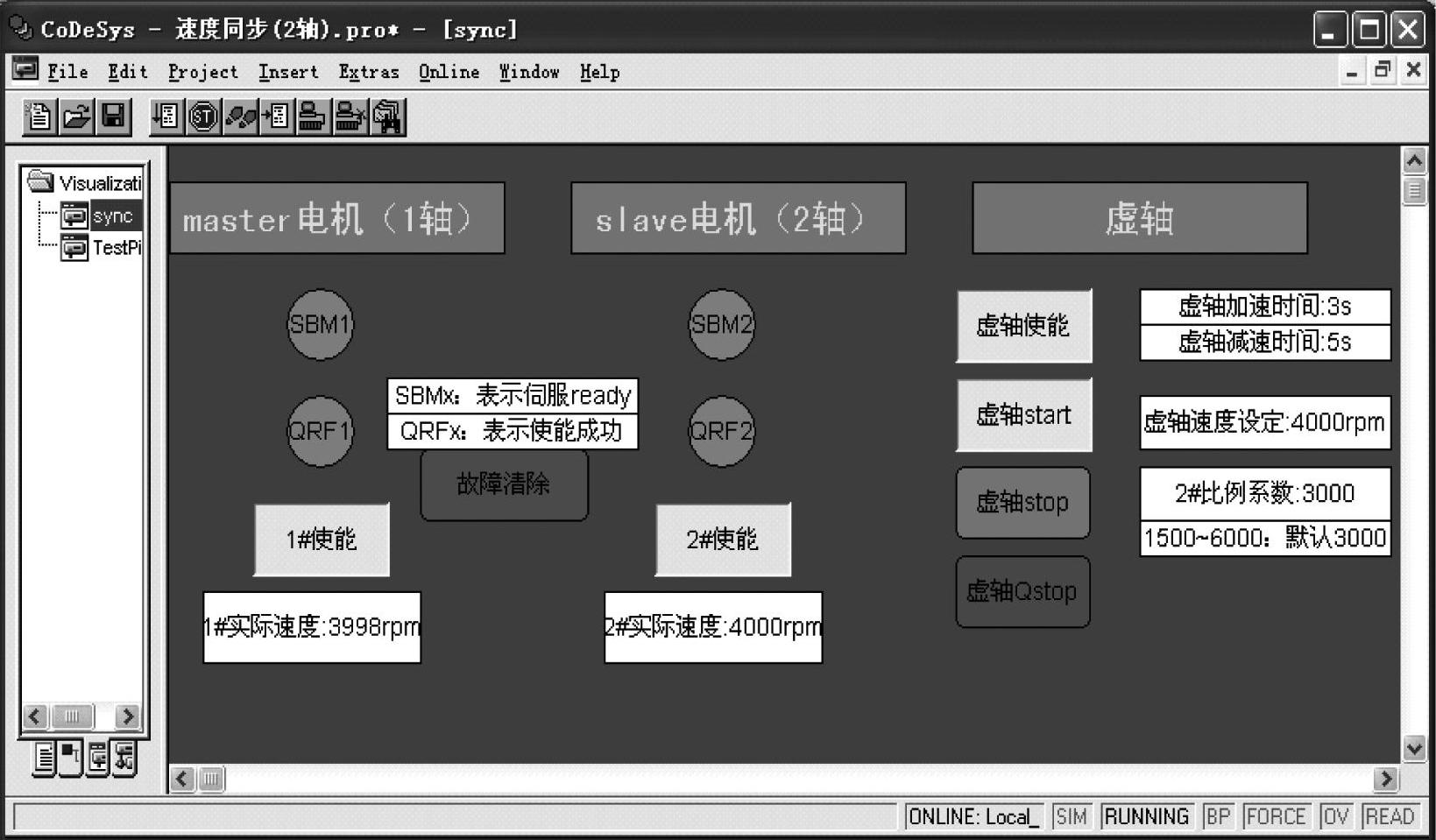
图5-23 Visualization控制界面
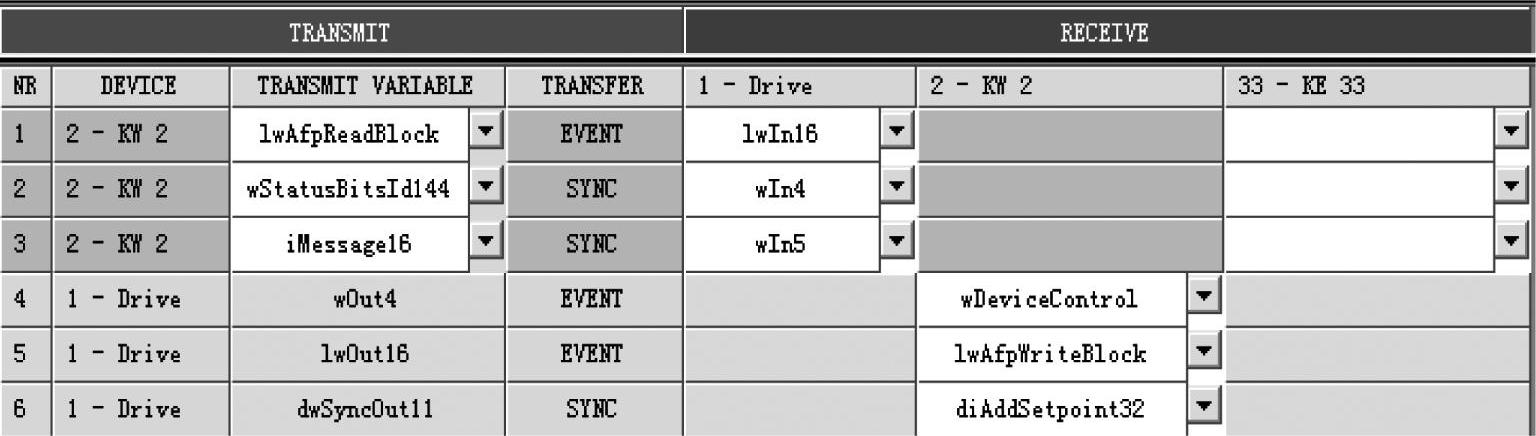
图5-24 AipexPro配置软件Messages通信表设置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。