



【摘要】:图5-1 配置PLC版本及类型3)创建PLCPRG并选择编程语言ST,如图5-2所示。图5-4 建立“ACTUALAXIS”功能块6)添加“AmkDriveAfp”库文件,为下一步调用SPEED功能块做准备,如图5-5所示。图5-7 AFPFCT功能块的调用9)在“Visualization”界面中对“local axis”轴进行状态显示及控制,如图5-8所示。
1)打开CoDeSys,新建“Project”;
2)选择“Target setting”,配置PLC版本及类型,如图5-1所示。
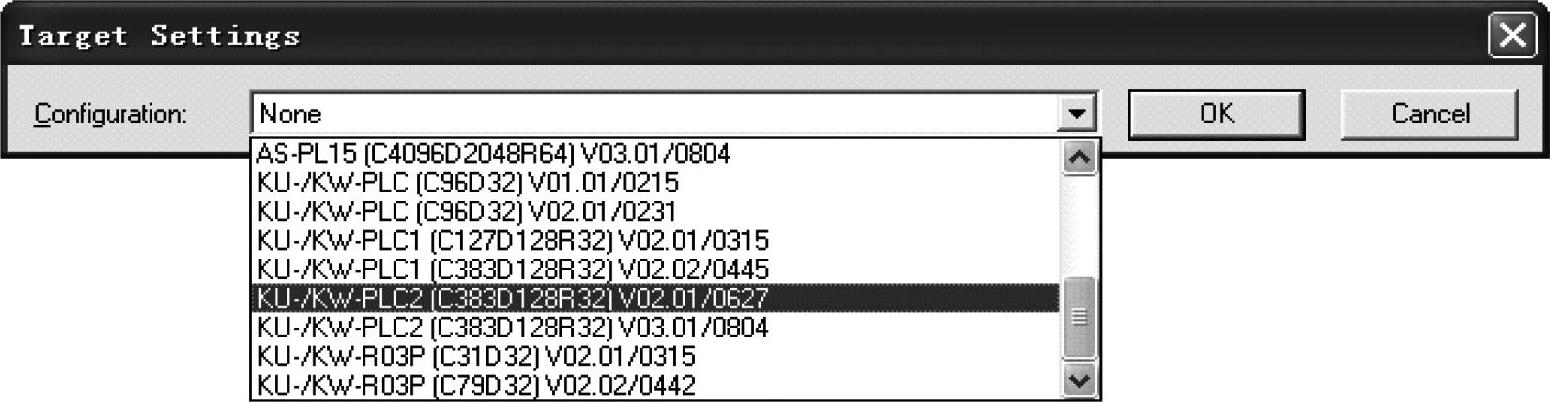
图5-1 配置PLC版本及类型
3)创建PLCPRG并选择编程语言ST,如图5-2所示。
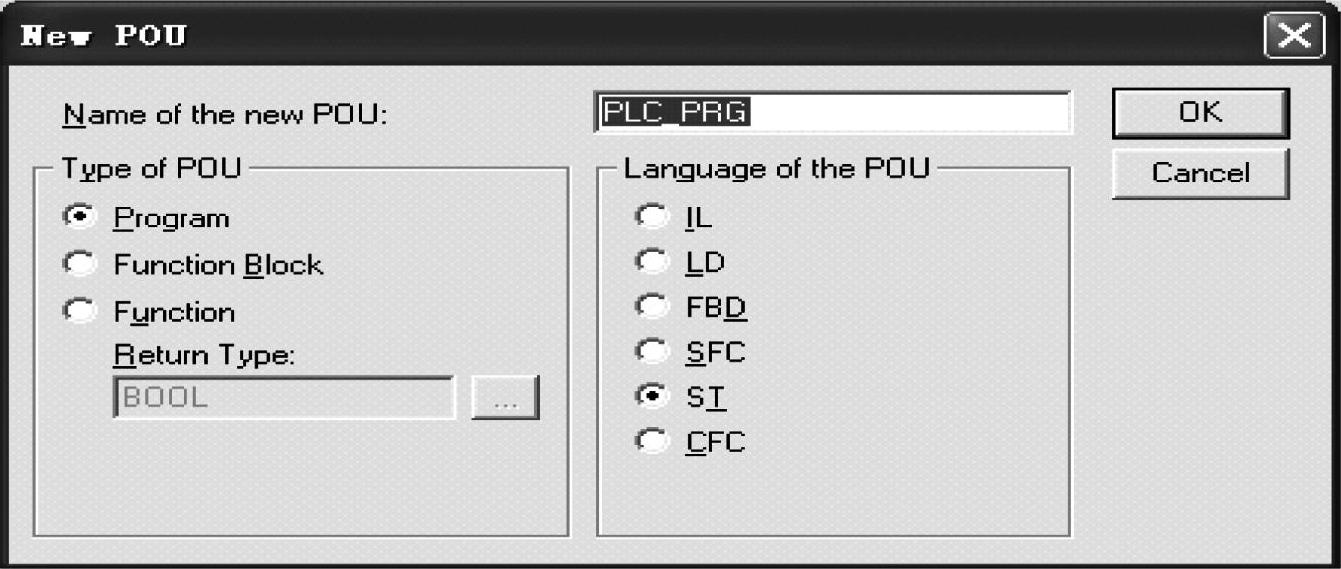
图5-2 创建PLCPRG
4)在“GlobalVariables”变量表中声明“local axis”结构体,如图5-3所示。
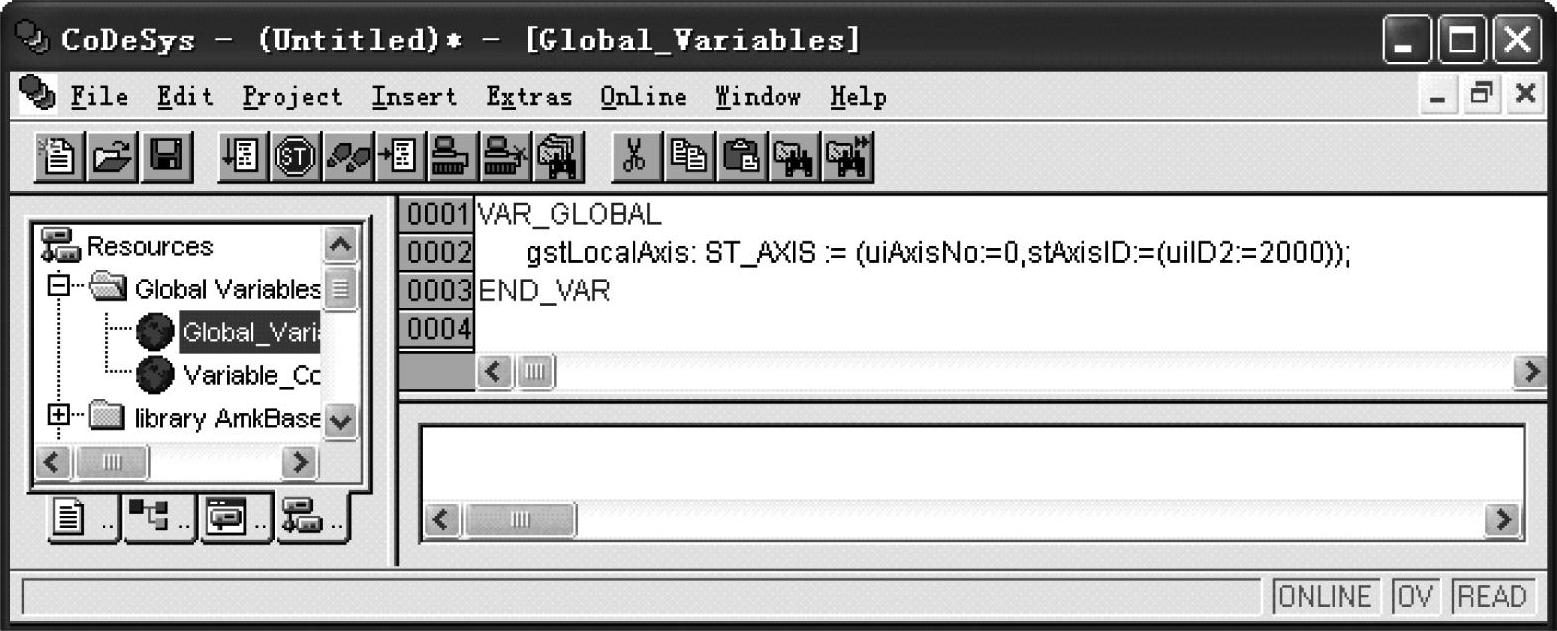
图5-3 声明“local axis”结构体
5)在PLCPRG中,建立实时更新“ACTUALAXIS”功能块,实时更新“local axis”轴结构体信息,如图5-4所示。
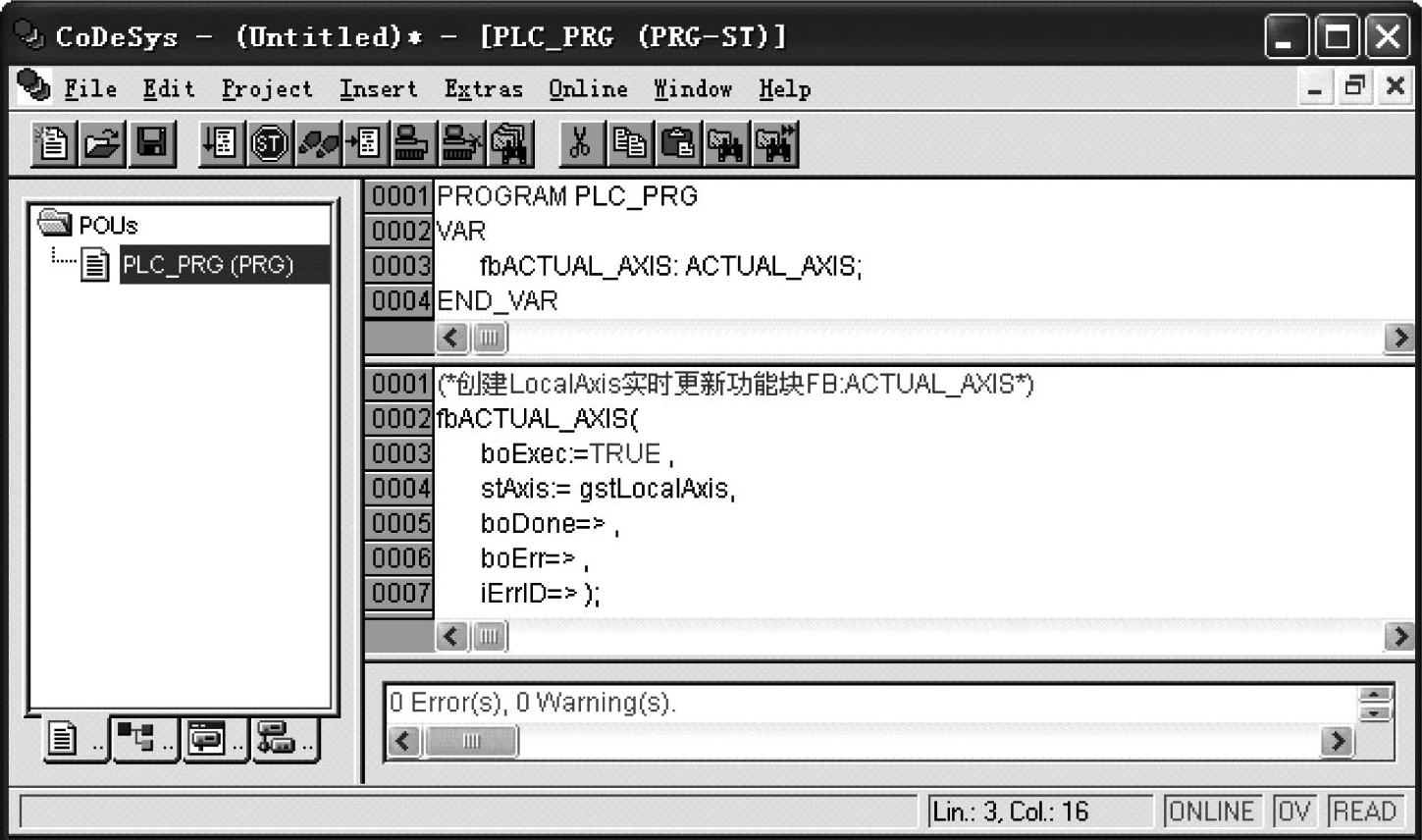
图5-4 建立“ACTUALAXIS”功能块
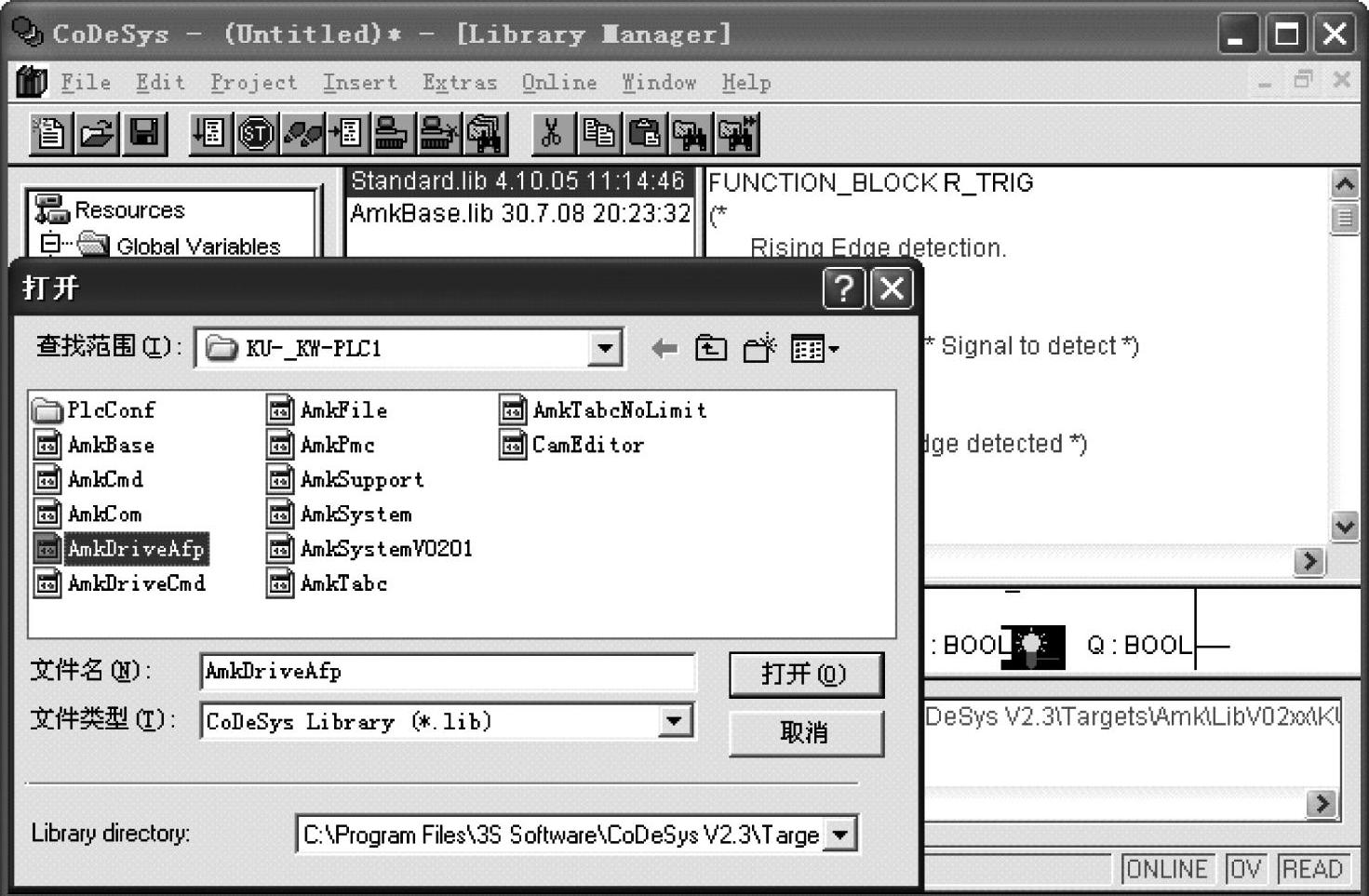
6)添加“AmkDriveAfp”库文件,为下一步调用SPEED功能块做准备,如图5-5所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-5 添加“AmkDriveAfp”库文件
7)创建AFPFCT功能块,采用ST语言编程,程序代码如下:

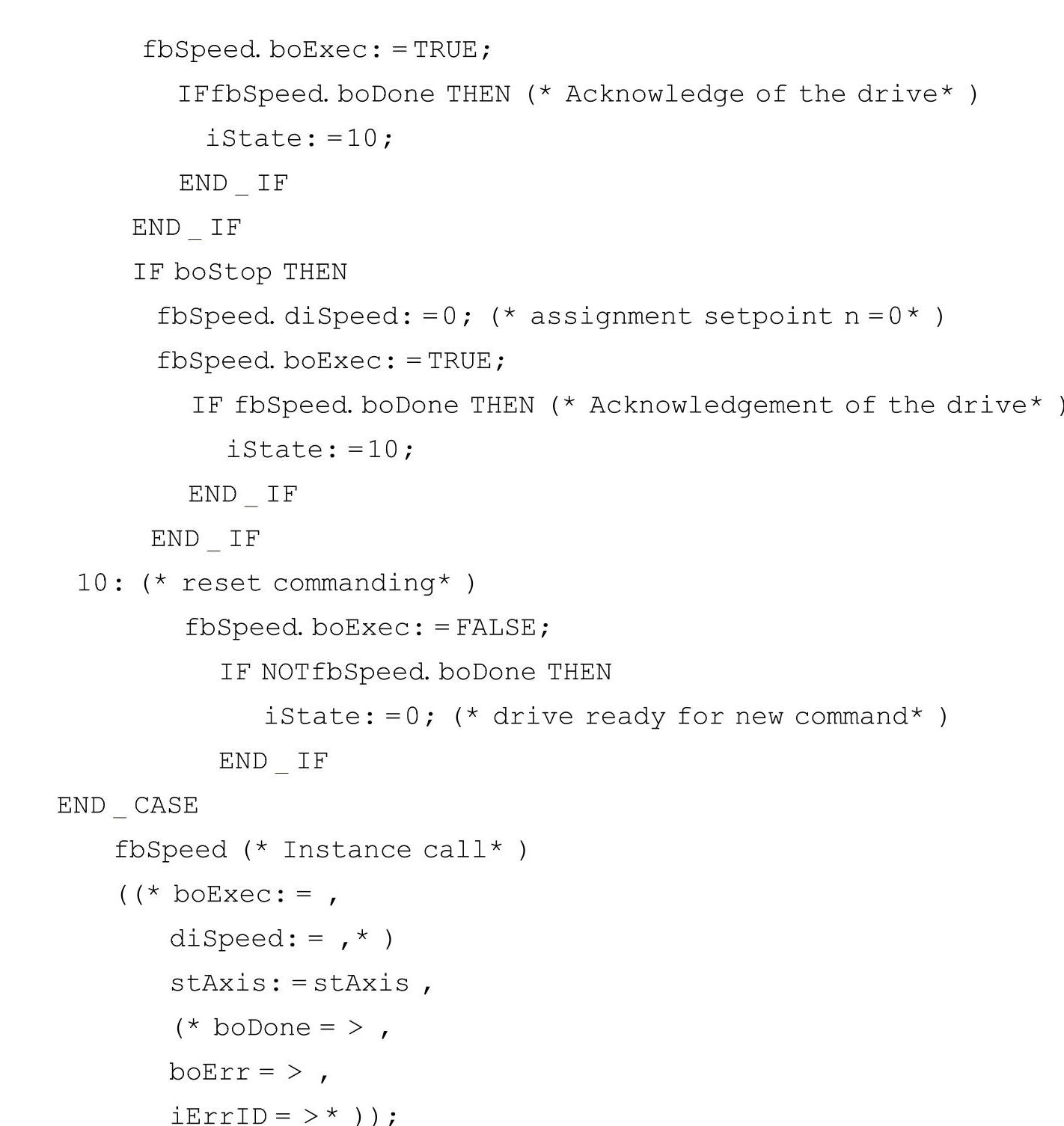
AFPFCT功能块编程窗口,如图5-6所示。
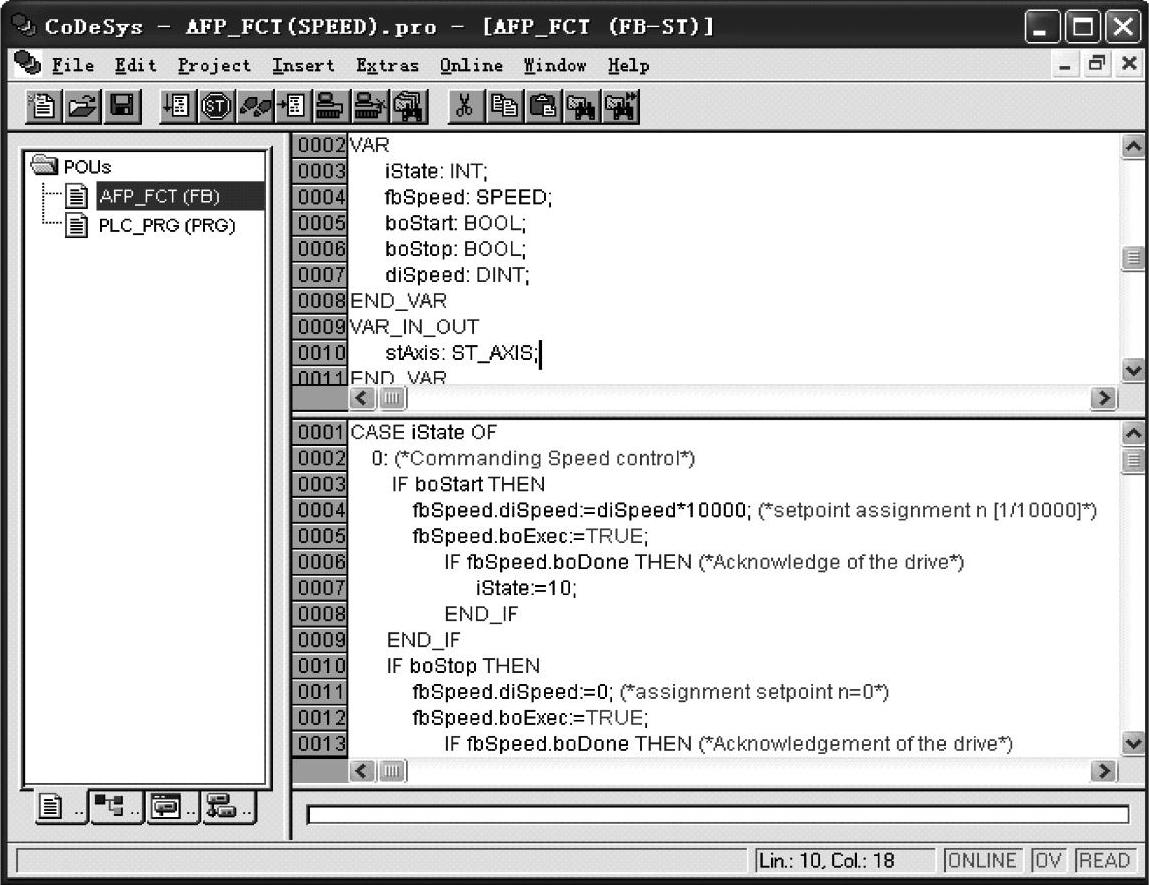
图5-6 AFPFCT功能块编程窗口
8)AFPFCT功能块在PLCPRG中的调用,如图5-7所示。
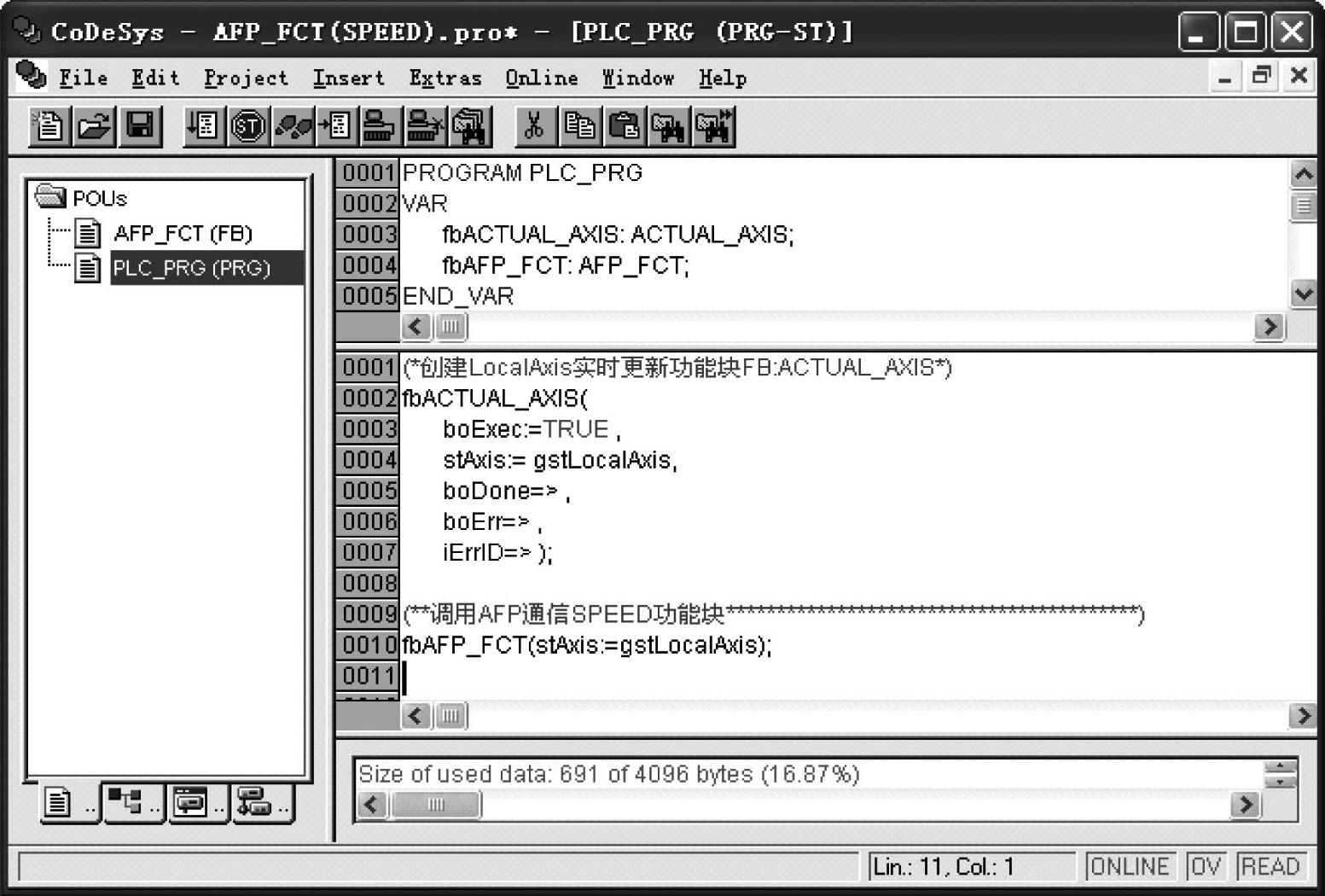
图5-7 AFPFCT功能块的调用
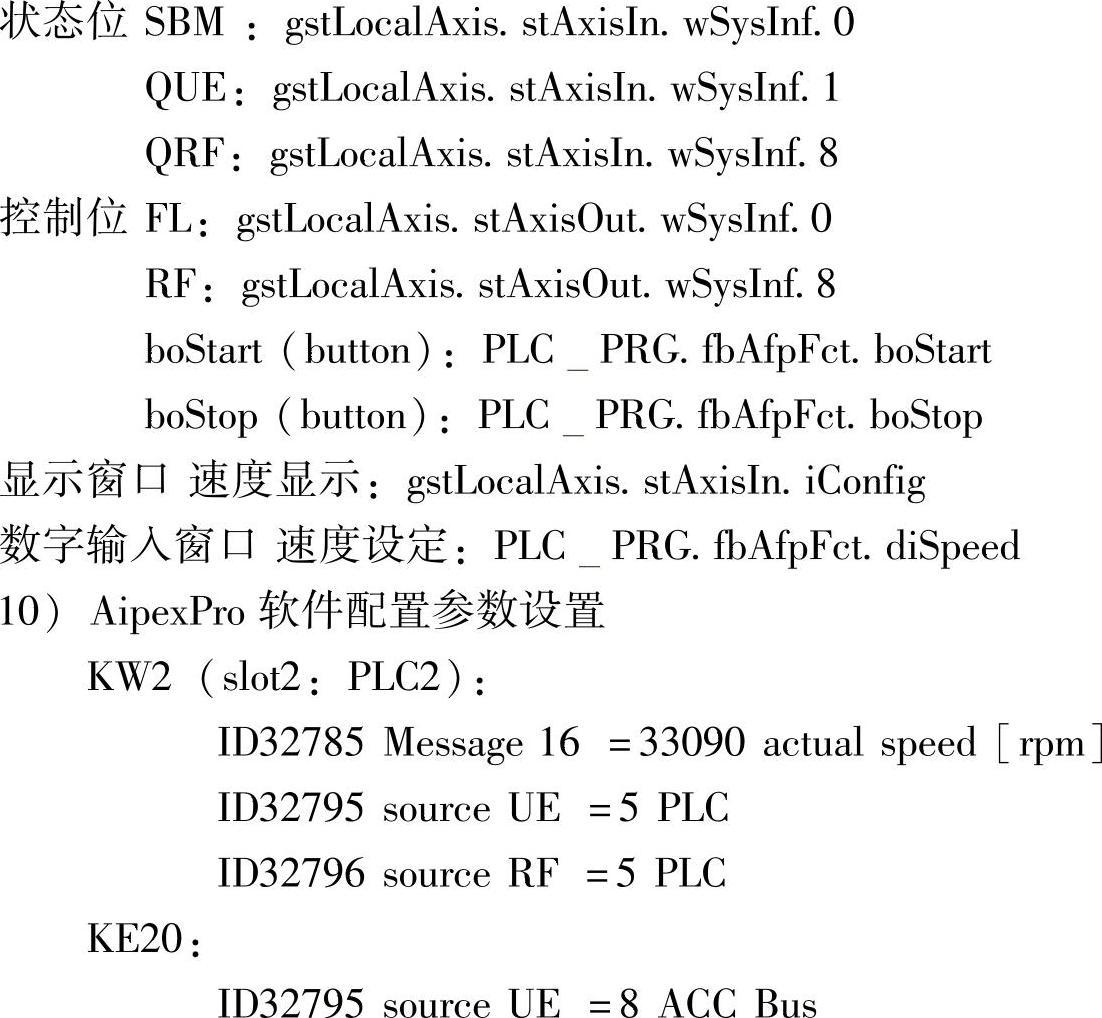
9)在“Visualization”界面中对“local axis”轴进行状态显示及控制,如图5-8所示。
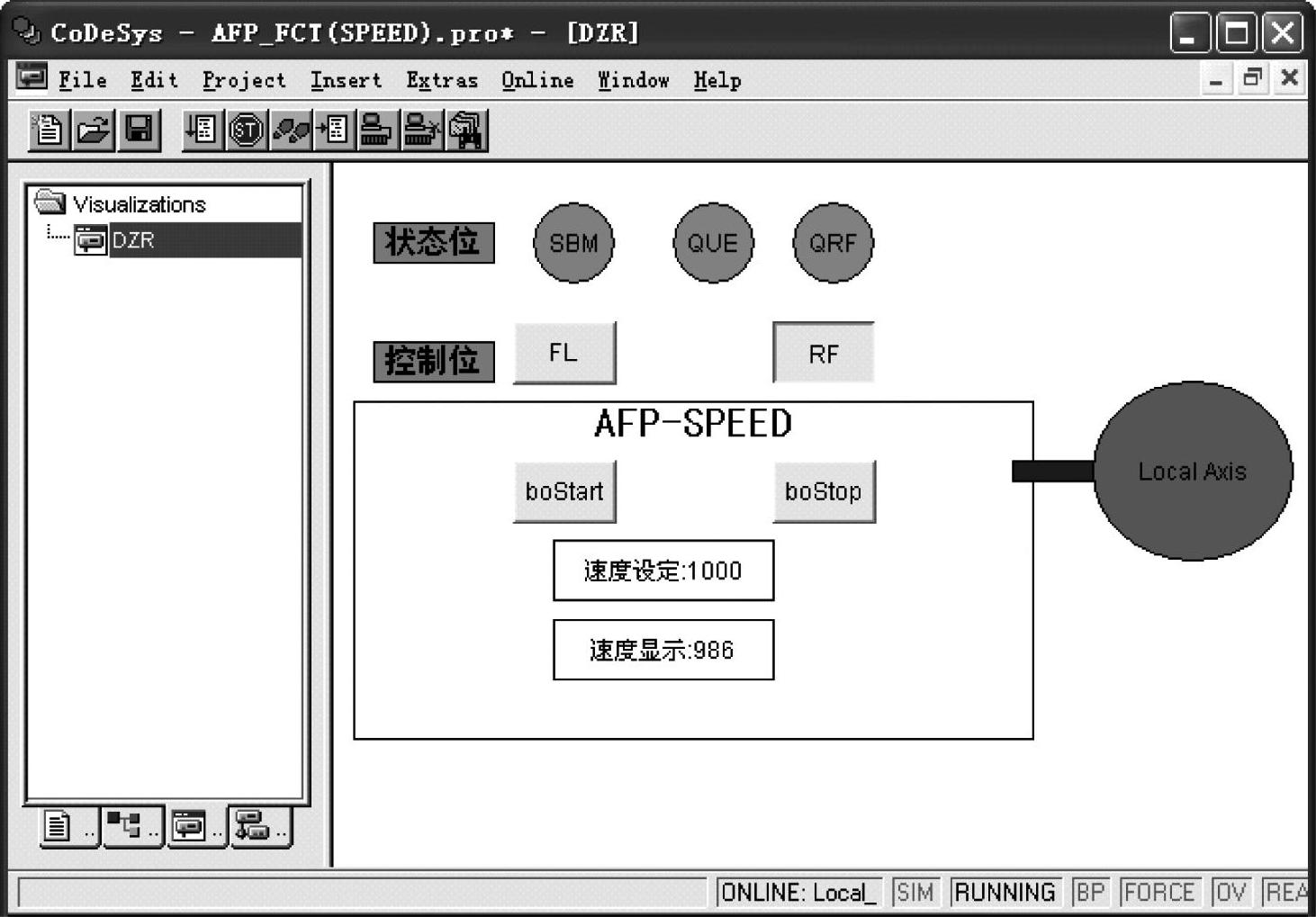
图5-8 “Visualization”控制界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。