



应用程序接口API是Application Interface的缩写,主要应用ACC总线通信。在AMK伺服系统中,API代表一个访问AMK驱动功能的简单的应用层接口。API通过配置变量阵列完成对从站的控制和监视分析。API分发送变量(如actual values,status variables,configu-rable cyclical display values,variables for the evaluation of binaryinputs)和接收变量(如16/32bit setpoint sources,control variables,variable for the control of binary outputs),发送或接收均是以驱动器为参照物。
只有明白API的意义,才能正确地配置ACC总线通信。下面将对API涉及的规则和参数意义进行说明。
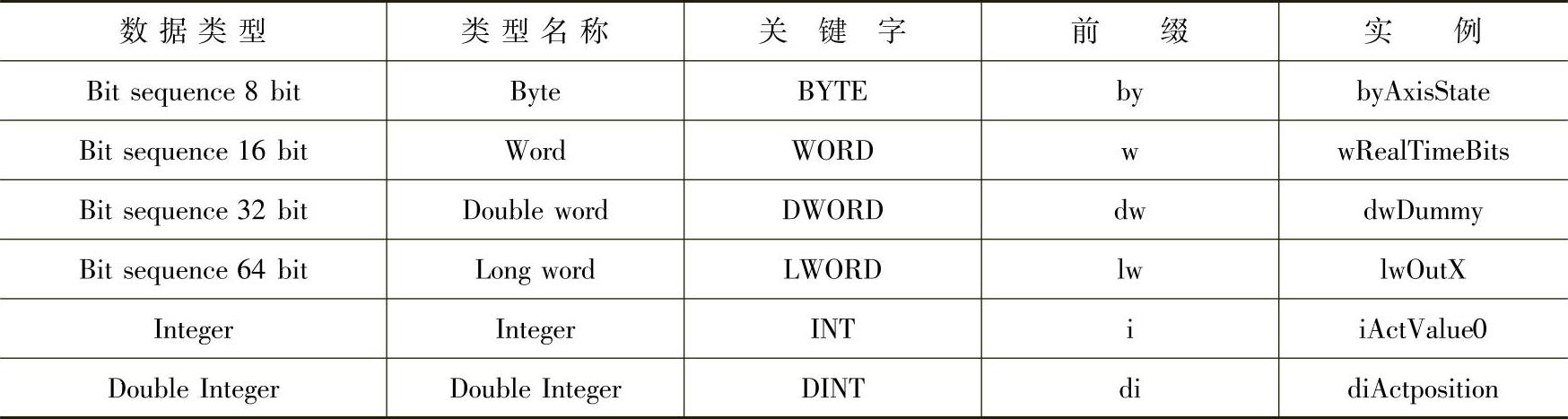
API变量命名规则:由表4-1可以看出,API变量由数据类型前缀和具体名称两部分组成。例如实际位置(diActPosition)由数据类型前缀di和具体名称ActPosition构成。
表4-1数据类型前缀和具体名称
API变量涉及AMK伺服的多种产品,但从总体来看,可分为以下几类。
•Set-point variables:设置源变量;
•Status and control variables:状态及控制变量;
•Actual value variables:实际变量;
•Binary inputs/outputs:输入/输出位;
•Error bits:错误位;
•Analog inputs/outputs:模拟量输入/输出;
•Configurable 4∗32Bit Message:可配置4∗32位信息;
•AFP Protocol for drive commanding:驱动命令协议AFP;
•Feed-forward control variables setpoint list-and actual value list:前馈控制变量和实际值设定列表;
•Field bus variables:现场总线变量;
•Dummy variables:占位变量;
•Parallel connection servo controller:并联伺服控制器。
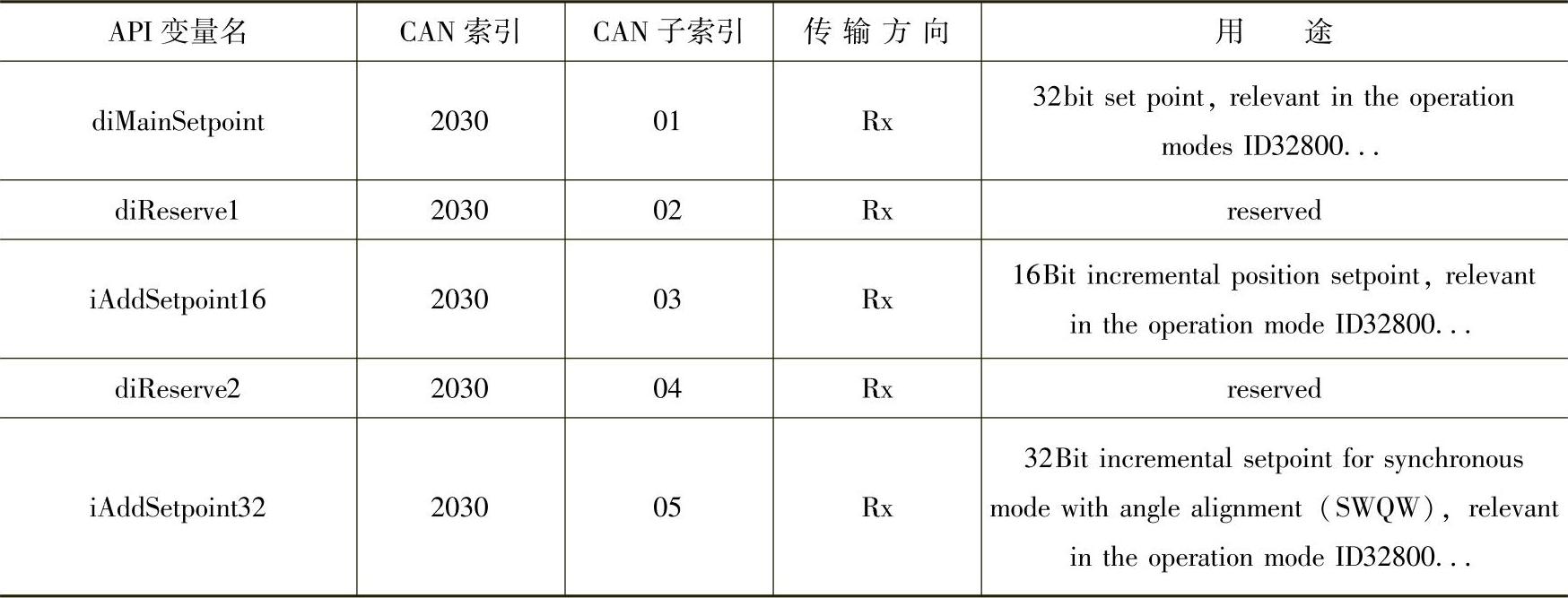
1)设置源变量(Set-point variables),见表4-2。
表4-2设置源变量
2)状态及控制变量(Status and control variables),见表4-3。
表4-3状态及控制变量
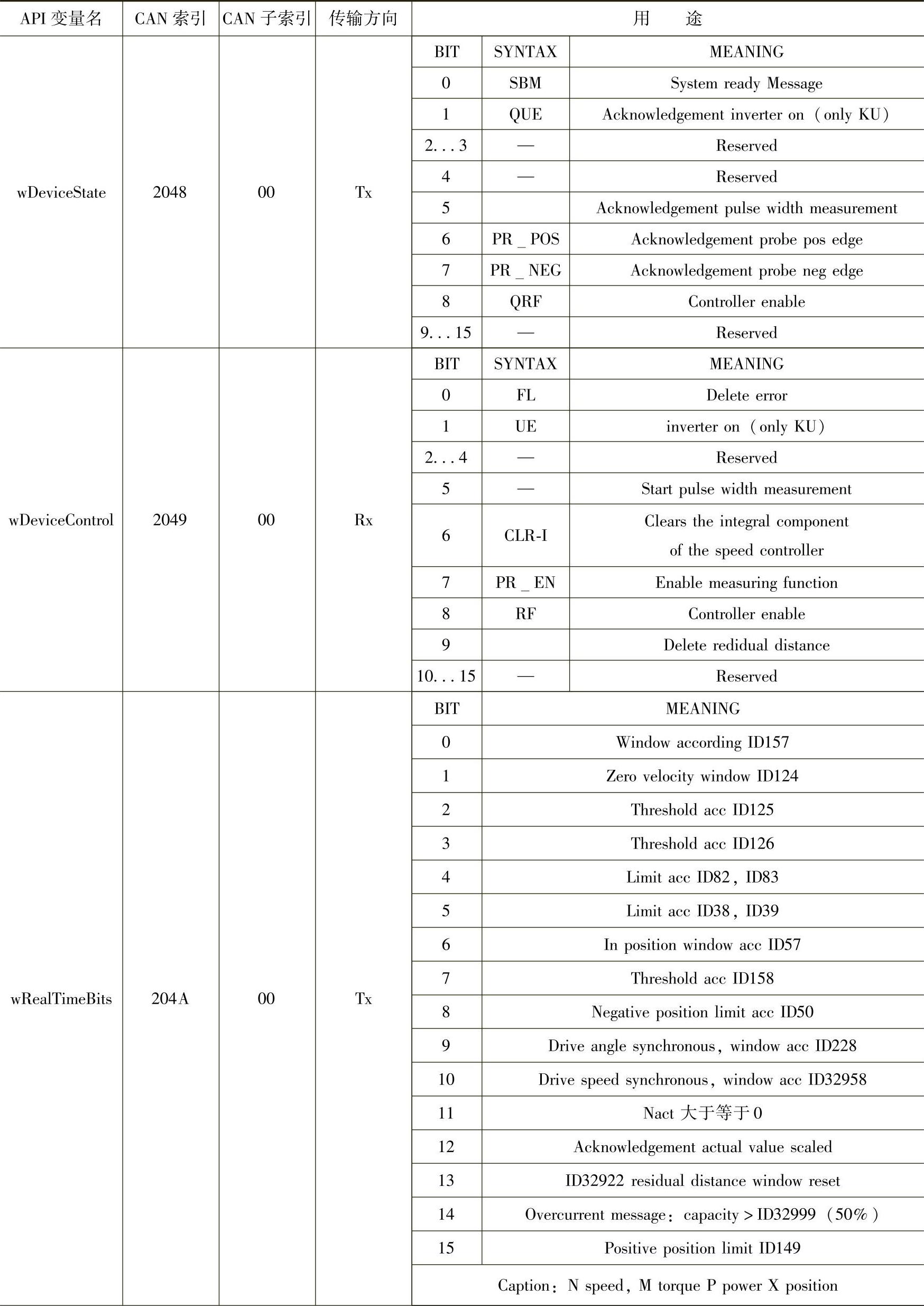
(续)

3)实际值变量(Actual value variables),见表4-4。
表4-4实际值变量
 (https://www.xing528.com)
(https://www.xing528.com)
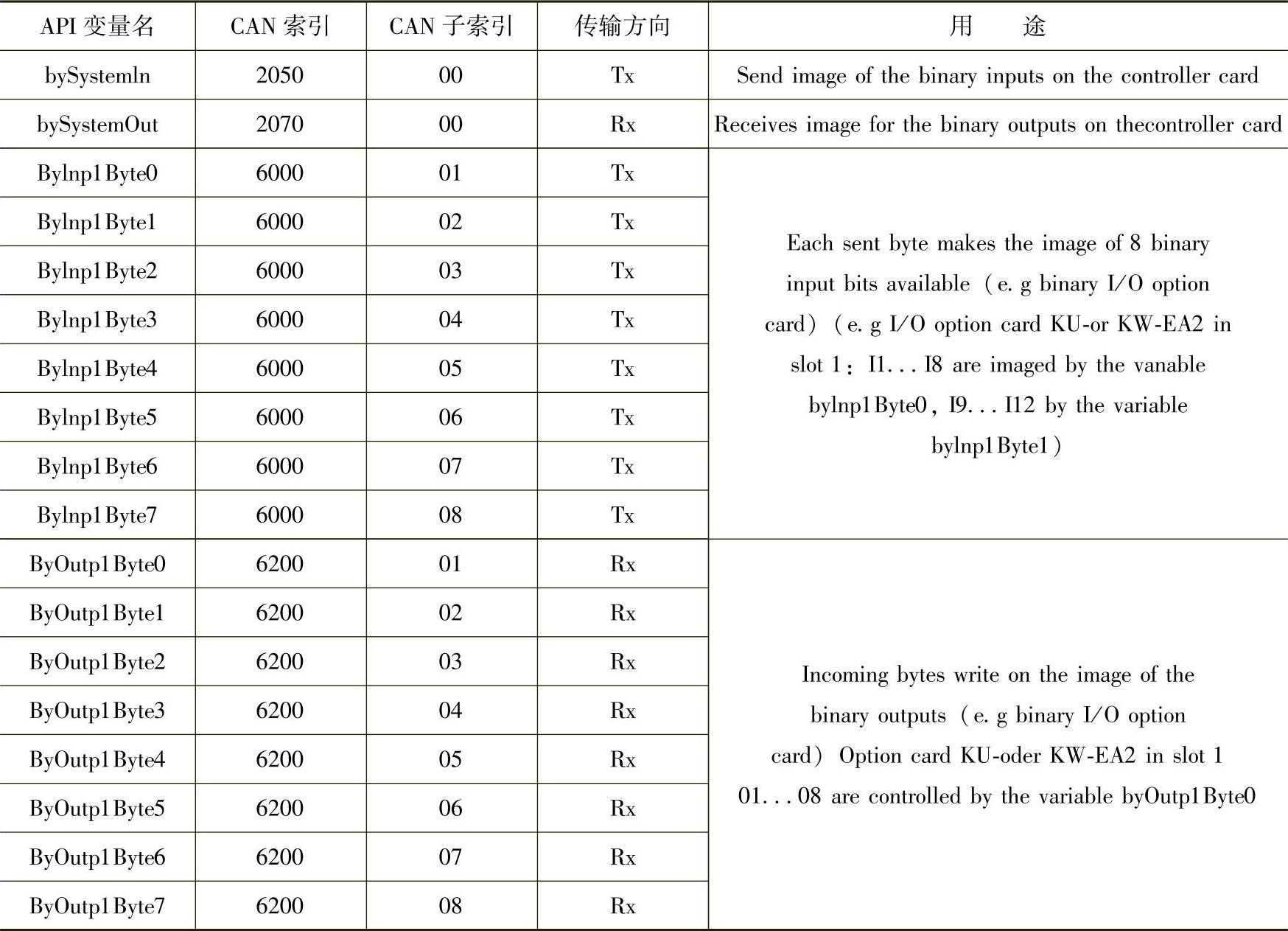
4)二进制输入/输出变量(Binary inputs/outputs),见表4-5。
表4-5二进制输入/输出变量
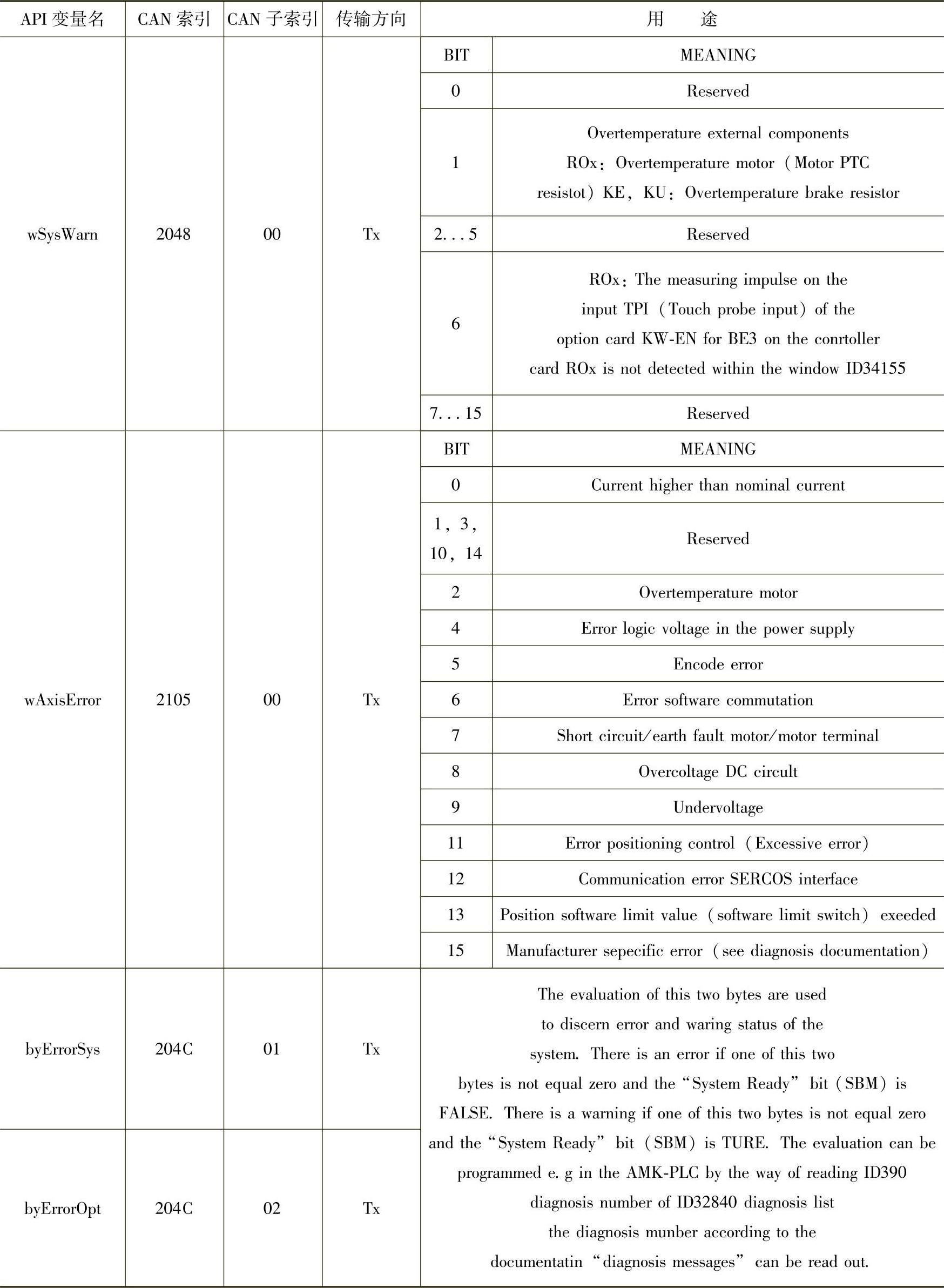
5)错误位(Error bits),见表4-6。
表4-6错误位
6)模拟量输入/输出(Analog inputs/outputs),见表4-7。
表4-7模拟量输入/输出

7)配置4∗32位信息(Configurable 4∗32Bit Message),见表4-8。
表4-8配置4∗32位信息

8)驱动命令协议AFP(AFP Protocol for drive commanding),见表4-9。
表4-9驱动命令协议AFP

9)前馈控制变量和实际值设定列表(Feed-forward control variables setpoint list-and actualvalue list),见表4-10。
表4-10前馈控制变量和实际值设定列表

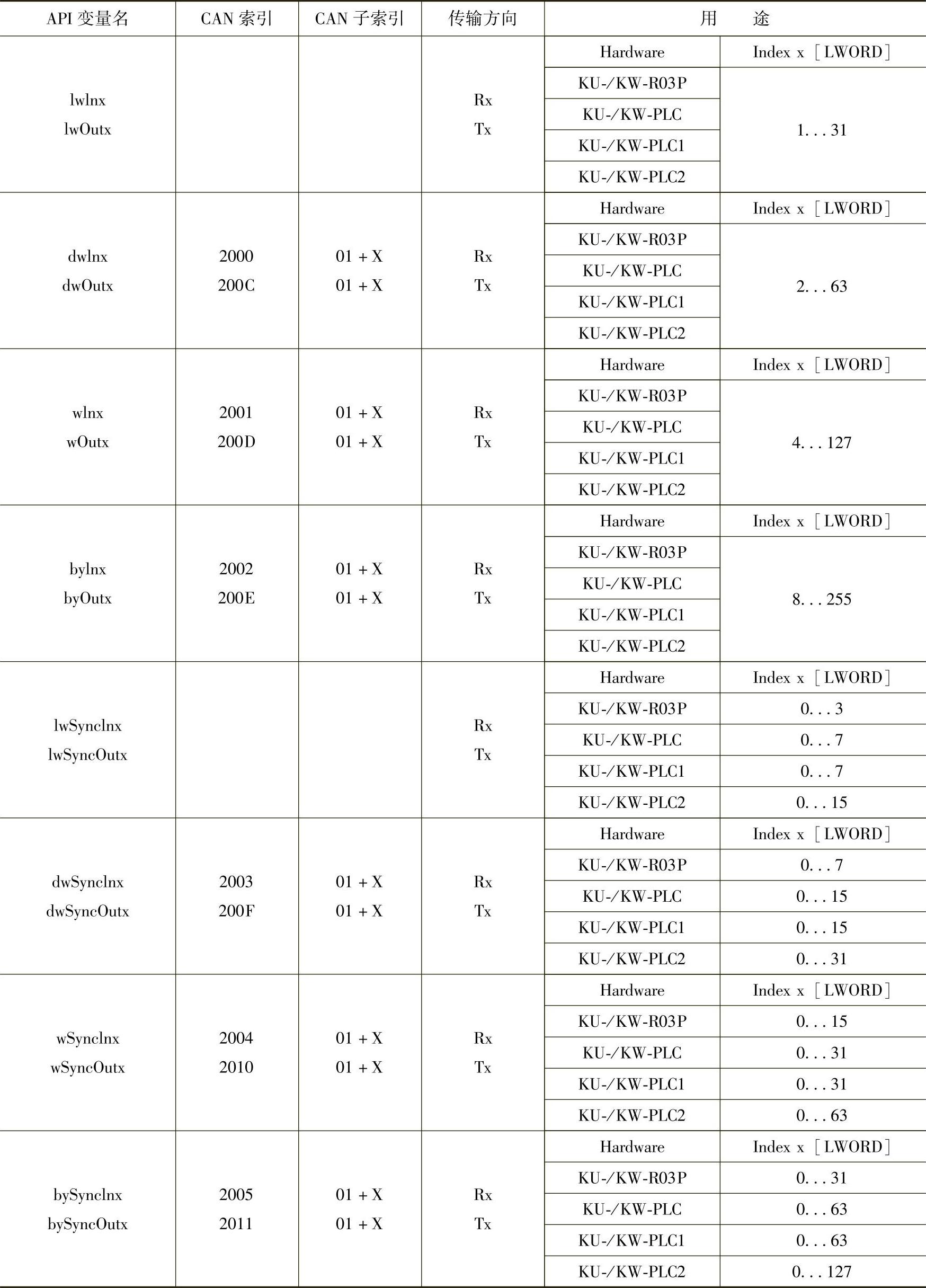
10)现场总线变量(Field bus variables),见表4-11。
表4-11现场总线变量
11)占位变量(Dummy variables),见表4-12。
表4-12占位变量

12)并联伺服控制器变量(Parallel connection servo controller),见表4-13。
表4-13并联伺服控制器变量

以上API变量主要是针对KW和KU伺服驱动器系列,但对于其他的系列也同样适用,例如KWZ双轴系列伺服,KWF双轴变频器系列,伺服与电动机一体化IDT系列,区别只是API变量的数量多少不同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。