



KE电源模块为KW驱动器模块提供直流母线电压,并将电动机减速过程中所产生的能量回馈到电源(KEN模块无能量回馈功能)。在电源故障时,产生的制动能量将不再被反馈到电源,为了在这种情况下仍能使驱动器减速,需要外加制动电阻。
KE电源模块包含以下功能组:
•控制逆变桥产生直流母线电压并把多余的制动能量回馈到电源,KEN(没有再生制动)设备装配有一个整流桥。
•直流母线电路的充电装置。
•制动单元:
在断电的情况下,电动机减速产生的可再生能源首先被存储在直流母线电容里,此时,如果直流母线电压超过它的极限,制动单元就会被激活,通过制动电阻把多余的制动能量转换成热能。
制动单元集成在内部,制动电阻必须被安装在外部。制动电阻的温度通过一个PTC电阻(连接点X25)在KE模块内测量。如果装置没有制动电阻运行,需要将终端RT1和RT2桥连。
•KE内部控制电源:
内部控制电源功能块提供电源模块内部使用的+5V、+12V、-12V控制电源。该功能块需要外部通过端子X08/X09向它提供24V直流电压。
•监视/接通逻辑:
电源和直流母线电压、电源电流、温度还有内部电压的极限值都被监控,当大于极限值,就会生成错误信息。
KE模块加上24V直流电源后启动。“SBM”(KE系统就绪信息)输出,系统和ACC总线无故障,开始运行。
信号“UE”(直流母线使能)触发直流母线电压的充电过程。直流母线电容通过内部电阻充电结束后,电网电源电压通过外部安装的主接触器K1(KEN 5带有内部主接触器)接通;整个过程正确完成后,“QUE”(直流母线使能应答)信号被置为1。
KE电源模块的前面板接口信息如图2-30所示。注意,各型号的电源模块其所带有的接口不完全相同。
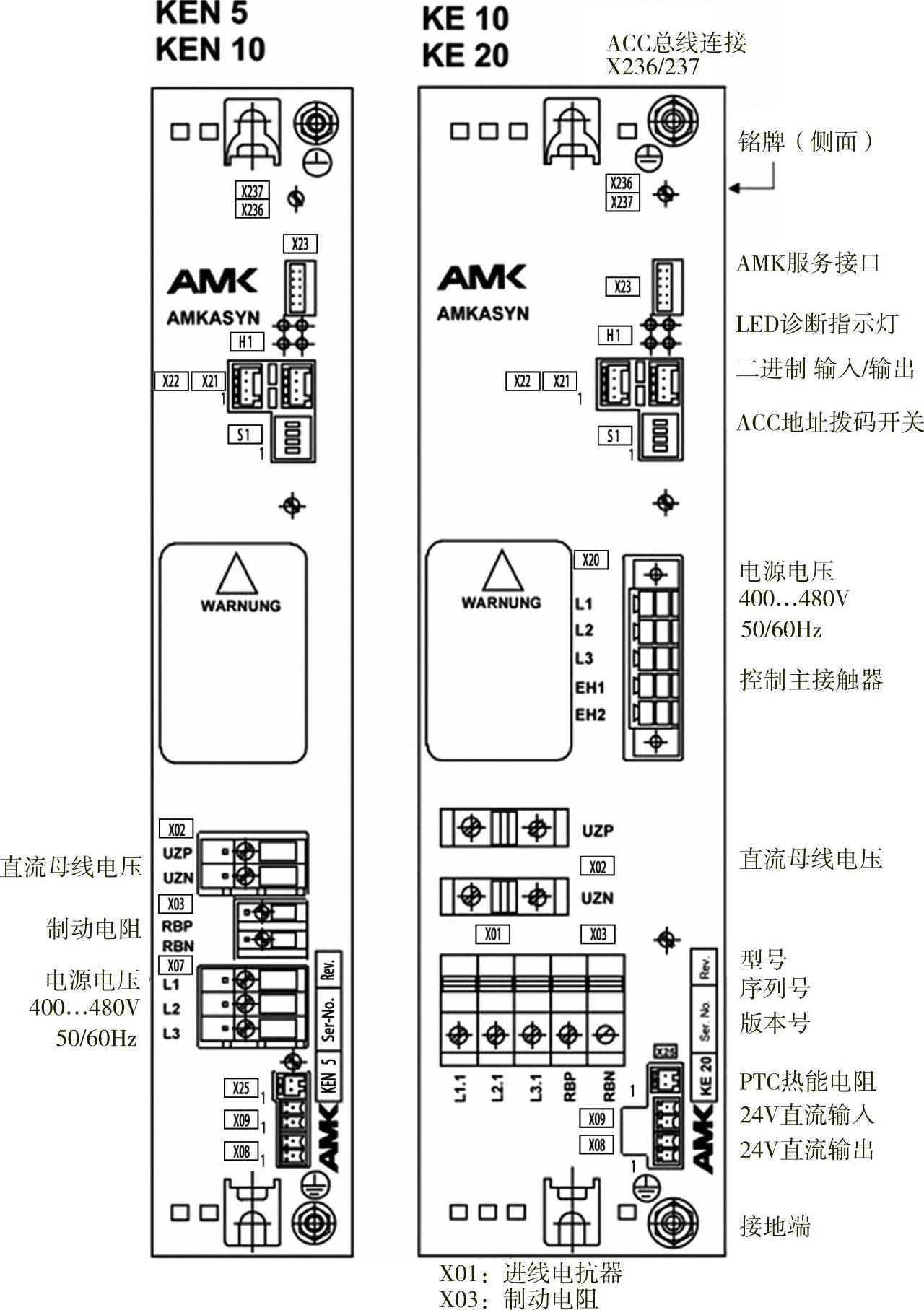
图2-30 KE电源模块前面板接口信息
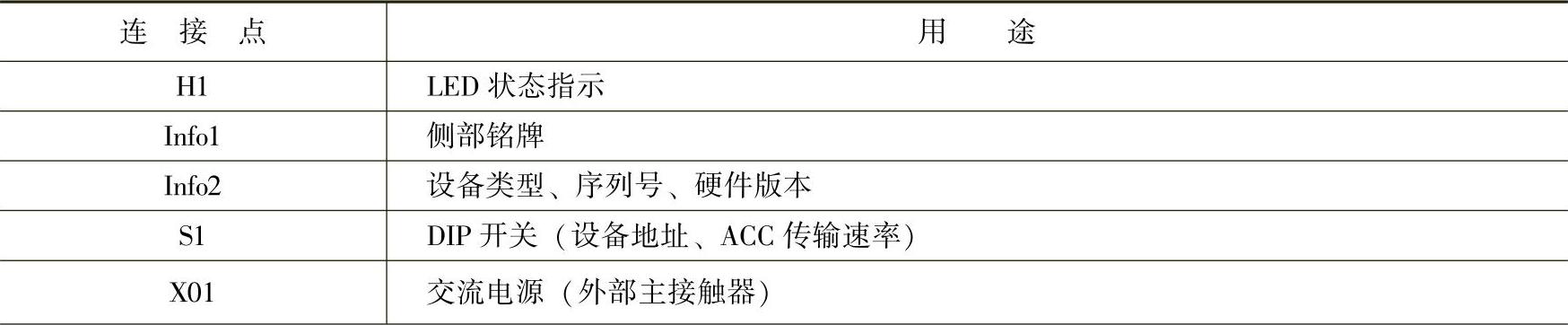
KE模块前面板各接口的功能定义见表2-22,下面将对各接口的功能及使用方法做详细介绍。
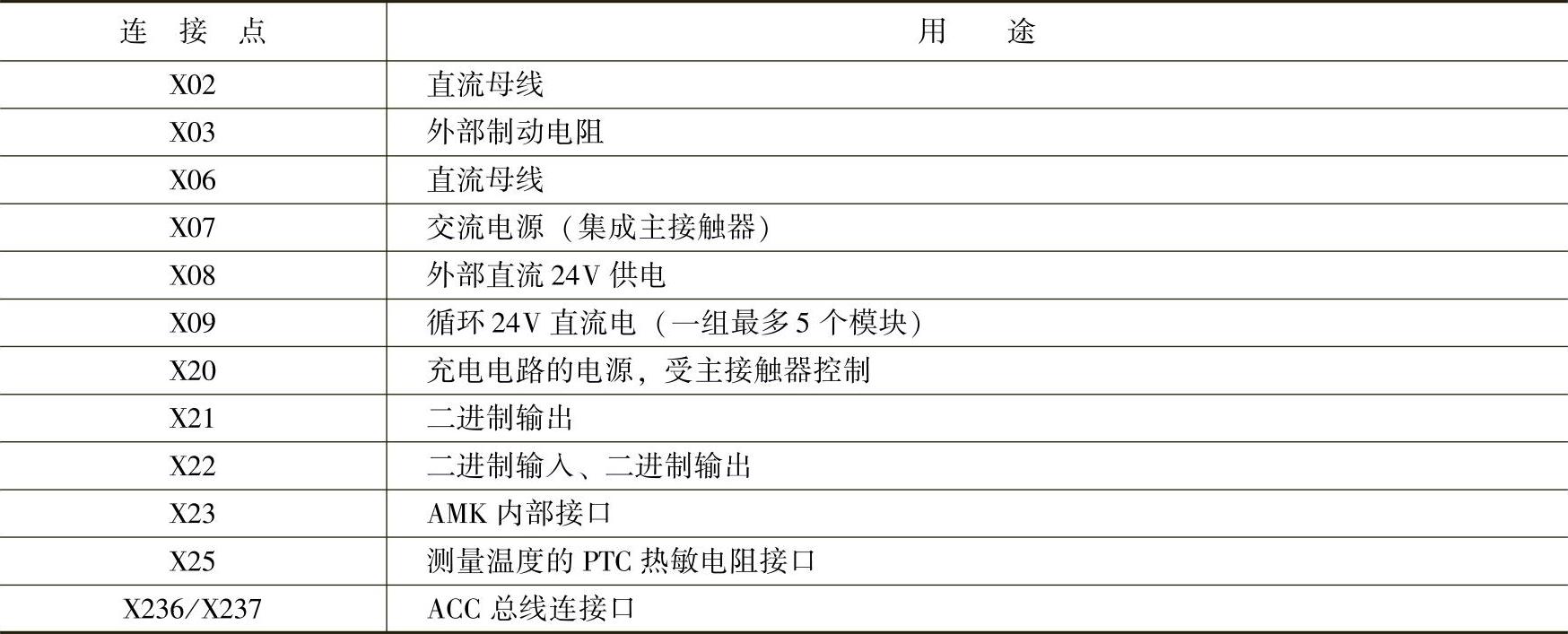
表2-22KE模块前面板接口功能定义
(续)
1.状态指示
KE模块的状态通过H1的4个LED灯指示,除了LED显示之外,这些状态还可以通过总线读出。
当发生故障时,“系统就绪信号”(SBM)被取消,并且在H1的LED区域显示错误指示。故障代码可以通过操作面板或者AipexPro软件读出,故障在AMKASYN“故障信息”文档中有进一步说明。
这些故障必须被复位才能清除,例如在二进制输入端加一个“清除故障”(FL)脉冲。
电源模块故障时系统的状况:
•再生制动功能被禁止;
•“系统就绪信息”(SBM)被取消,SBM=0;
•主接触器断开,并将KE模块主电源分离;
•直流母线电压通过外部电阻放电;
•QUE信号被置0;
•在消除故障之后,KE模块重新上电后会报“系统就绪”,SBM=1。
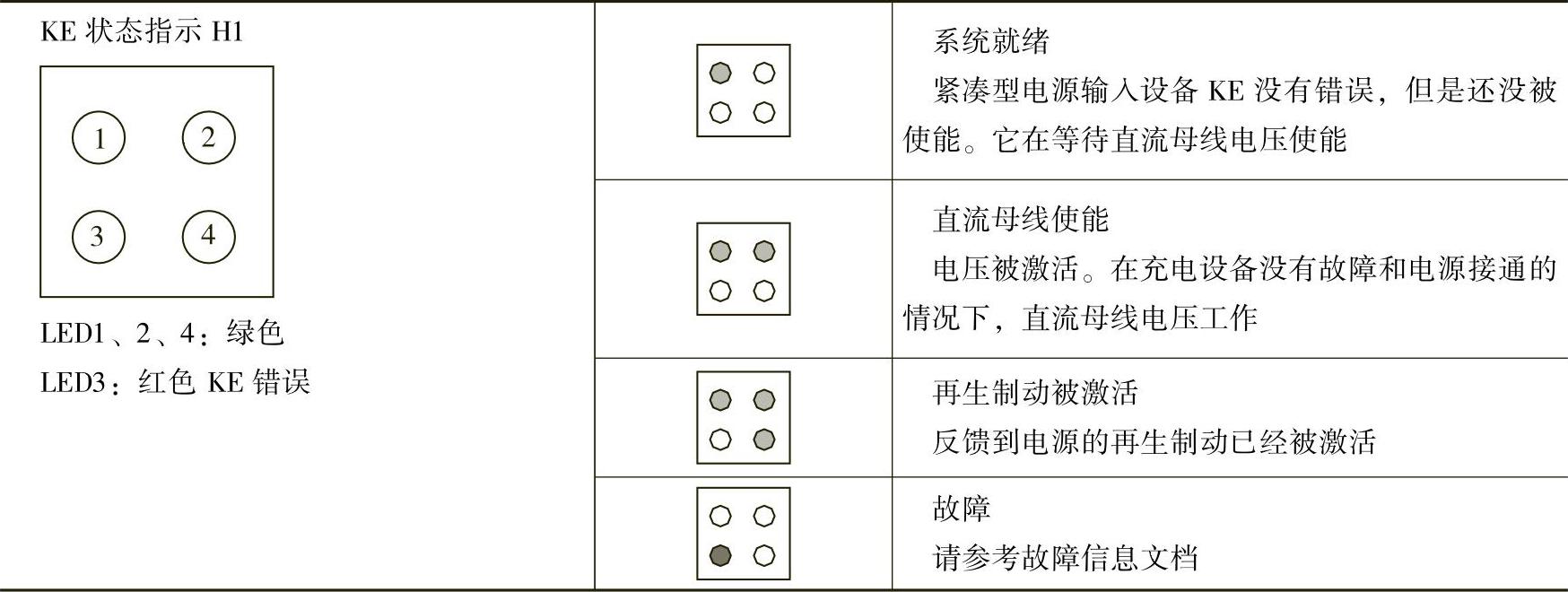
H1中的状态指示LED灯的位置及各LED灯所代表的系统信息见表2-23。
表2-23KE电源模块H1状态指示LED灯的位置及各LED灯所代表的系统信息
2.接口功能
◆X01电源供应(通过主接触器K1和电抗器)
L1.1:线电抗器ALN连接(端子U2);
L1.2:线电抗器ALN连接(端子V2);
L1.3:线电抗器ALN连接(端子W2);
主电源电压为3×400V~480V±10%,50/60Hz。
◆X02(X06)直流母线(KE120/KEN120为X06端子)
X02:可连接的最大负载为60kW;
X06:可连接的最大负载为100kW;
UZP:直流母线电压正极;
UZN:直流母线电压负极。
注意KE120/KEN120的最大输出功率。
◆X03外部制动电阻
RBN:制动单元输出;
RBP:直流母线电压UZP。
外部制动电阻要求使用屏蔽电缆连接,屏蔽电缆必须两端接地,接地线的线径尽可能大。
◆X07供电电源(各型号的电源模块的端子号不完全相同)
L1:电源L1相;
L2:电源L2相;
L3:电源L3相;
线电压3×(400~480)V±10%,50/60Hz。
◆X08/X0924V直流电源
Pin2:DC 24V;
Pin1:0V。(https://www.xing528.com)
由外部输入的24V直流电源向KE模块内部的开关电源和风扇供电。通过X08和X09使24V电源可以向后串联,最多可以允许串联4个KW驱动器模块。24V电源断电时间大于10ms就会发生故障,此时“SBM”信号被复位,主接触器断开。
◆X20主接触器闭合,直流母线电路充电
L1:电源L1相;
L2:电源L2相;
L3:电源L3相;
EH1/EH2:主接触器控制节点。
在直流母线电路充电完后,KE模块内的一个继电器吸合,常开触点EH1和EH2闭合,外部安装的主接触器K1接通,KE模块直接与主电源接通。
◆X21二进制输出
二进制输出通道间通过光耦合器隔离,输出额定电压为DC 24V,额定电流为100mA。要求采用屏蔽线连接,屏蔽层必须接地。
Pin1:SBM系统就绪信息(BA1:ID32865→33029)。
AMK伺服控制系统原理及应用
输出SBM信息说明模块处于无故障状态。
如果KE模块在ACC网络内,那么至少有另外一个处于ACC网络内的模块被识别出来,系统就绪才能被设置。在15s内,如果没有更多的ACC总线站点被检测到,则系统就绪被设置并且KE模块的ACC接口失效。如果KE模块的“直流母线使能信号”(DC Bus EnableUE)的信号是通过ACC总线发送的,15s后仍没检测到其他模块,就会产生一个错误的信息。
如果KE模块不需要ACC总线操作,那么应该把拨码开关S1全置于ON,这样延迟时间就无效了。
KE模块如果发生故障,系统就绪信息将会被重置,主接触器也会断开。
Pin2:QUE直流母线使能成功(BA2:ID32866→33030)。
直流母线电压已经通过充电装置充电完成,并已切换到外部安装主接触。在直流母线电压使能后,将会输出QUE。
Pin3:0V,外部向二进制输入和输出提供的24V直流电的基准电压。
Pin4:WBA,外部+24V的公共电源端,供X21和X22使用。
◆X22二进制输入/输出(Pin4)
X22提供两路二进制输入和两路二进制输出,各通道间通过光耦合器隔离。要求采用屏蔽电缆连接,屏蔽层必须接地。
输入额定电压:+24V;
输入额定电流:8mA;
响应时间:2ms;
输出额定电压:+24V;
输出额定电流:100mA;
采样间隔:1ms。
Pin1:FL故障复位(BE1)。
在系统故障排除后,通过故障复位(FL)可以把“系统就绪”信息写入KE系统。
Pin2:UE直流母线使能(BE2)。
上电后,在KE的输入端BE2加上一个保持的信号,内部的充电接触器吸合,大约1~5s后,安装在外部的主接触器K1吸合。
主接触器的励磁电压由外部提供,通过X20上的EH1和EH2的导通加载到线圈两端。当切换到主接触器后,充电接触器断开并且输出QUE信息“QUE:DC enable handshake”。
直流母线使能信号加载的两个先决条件:
1)KE系统就绪信息SBM=1;
2)为了保护充电设备,防止其热过载,连续两个开关接通命令的时间必须大于4s(时间的长短取决于直流母线电路的电容容量)。
Pin3:BA3二进制输入口3,可以通过参数ID32867自由配置功能。
Pin4:BA4二进制输入口4,可以通过参数ID32868自由配置功能。
◆X23保留给AMK服务用
◆X25 PTC制动电阻接口
RT1/RT2:连接监视外部制动电阻温度的PTC测温电阻,如果没有PTC电阻,那么RT1和RT2必须短接。制动电阻通过屏蔽电缆连接,屏蔽层的一端应接地。
◆X236/X237 ACC总线网络接口
3.DIP开关S1
KE模块的ACC站地址和波特率必须在DIP开关S1上设置,为了识别、设定参数和诊断,必须给每一个KE/KW模块分配一个不同的地址。
可以通过每一个KW模块的RS 232接口(X135)或选项卡的现场总线接口访问这些数据。KE模块和KW模块之间是通过ACC总线通信。
◆通过S1设置ACC总线波特率
KE波特率的出厂设置值是1000kbaud,当ACC总线长度大于25m时,应该降低数据的通信速率。通过S1设置ACC总线波特率的方法如下:
将开关4置于“1”位,通过1、2、3的组合设置波特率,断开24V,然后接通,新的波特率就会存储在EEPROM中。如果系统运行时不使用ACC总线,4个开关需要全部设置为1,当KE模块上电后,CAN接口是为无效的。S1开关位置定义如图2-31所示。
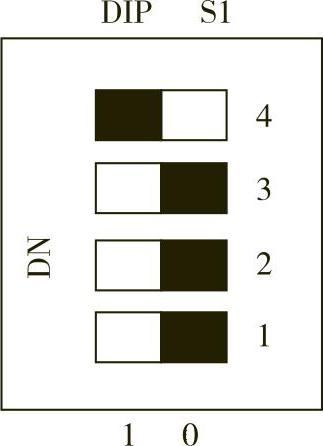
图2-31 S1开关位置定义
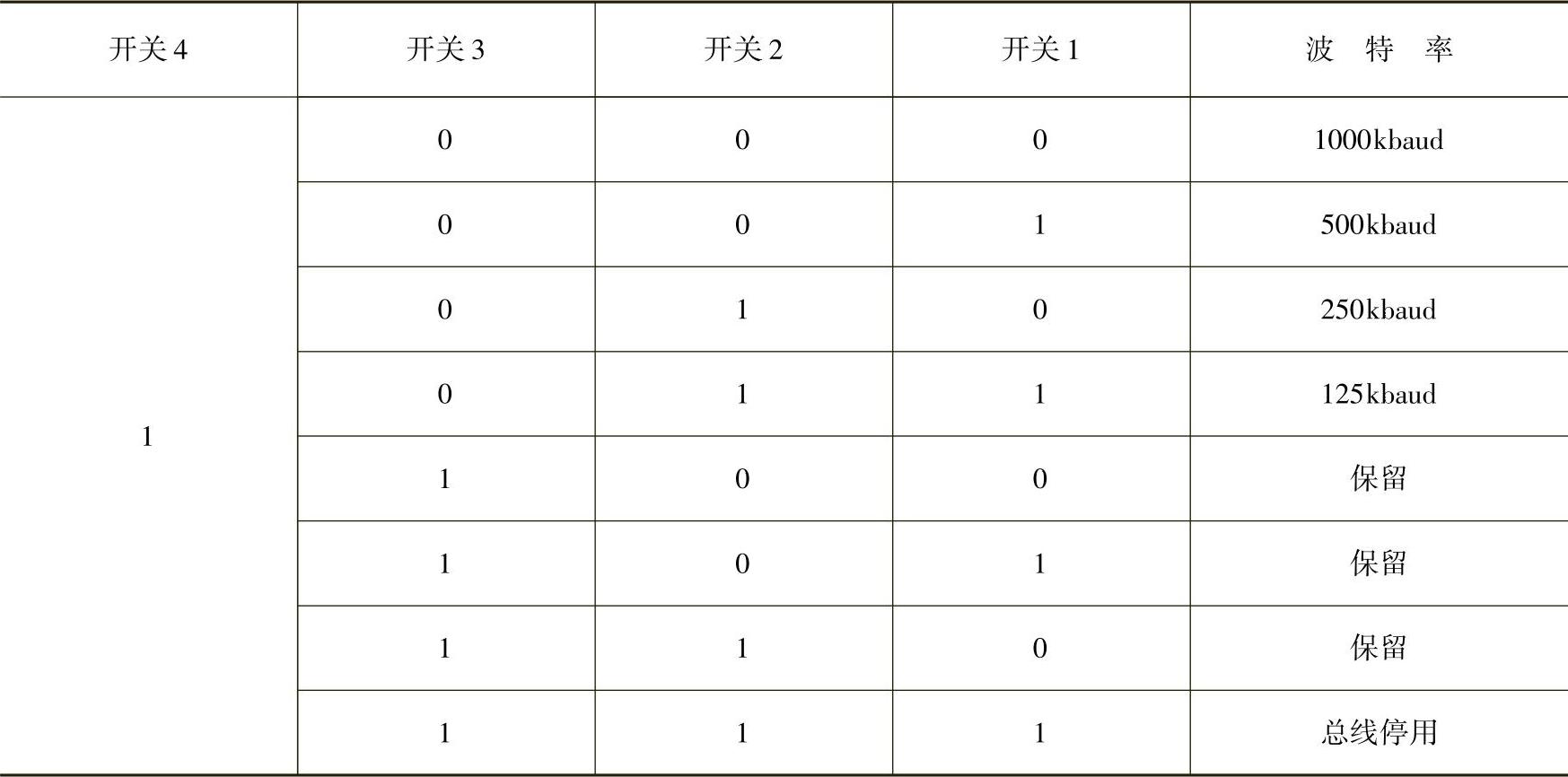
通过S1的开关1、开关2和开关3组合定义KE电源模块的ACC总线的通信波特率时,3个开关的组合对应的波特率见表2-24。
表2-24S1开关组合对应波特率
◆通过S1设置ACC总线地址
KE模块的ACC地址的出厂默认值是33,设备在这个地址下立即准备就绪。其他的KE地址(34~39)需要通过DIP开关S1进行设定,其方法如下:
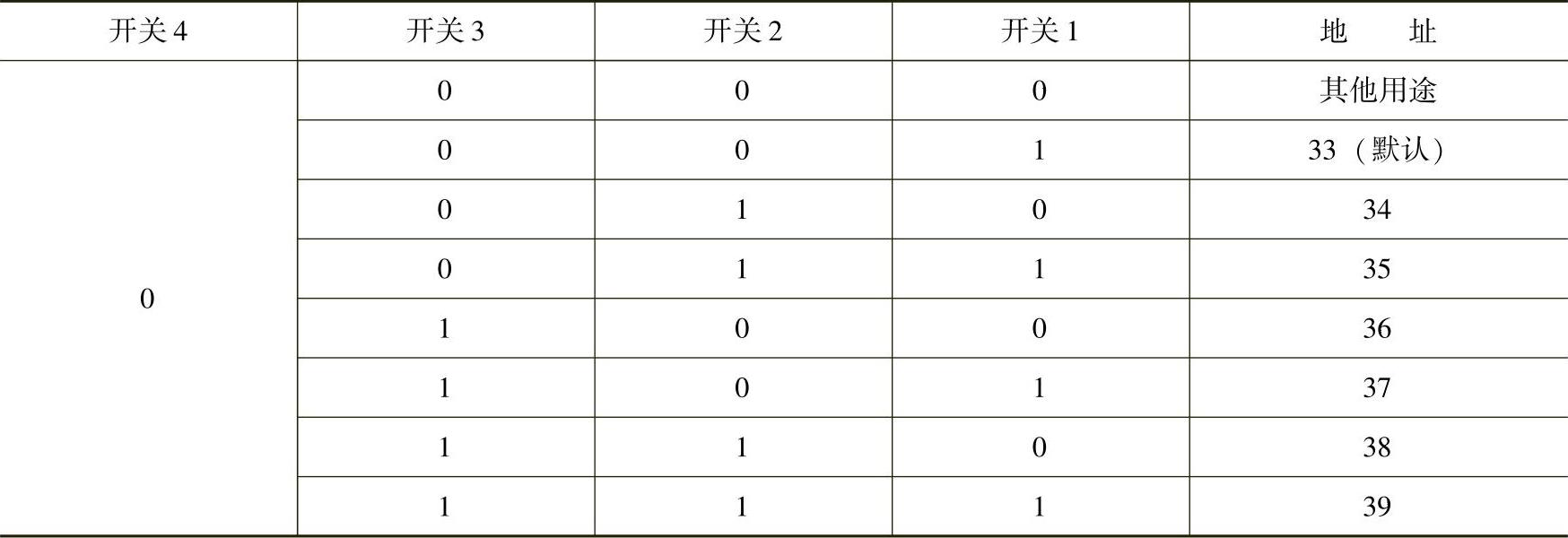
将开关4置于0位,通过1、2、3的组合设置地址,断开24V,然后接通,新的地址数据就会存储在EEPROM中。S1开关组合对应的KE电源模块的ACC地址见表2-25。
2-25S1开关组合对应的ACC地址
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。