



1.概述
步进电动机作为执行元件,是一种控制用的特种电动机,步进电动机利用其没有积累误差(精度为达100%)的特点,广泛应用于各种开环控制。
步进电动机是一种用电脉冲信号进行控制,并将电脉冲信号转换成相应的角位移的执行器。当步进驱动器接收到一个脉冲信号,它就驱动步进电动机按设定的方向转动一个固定的角度(称“步距角”),它的旋转是以固定的角度一步一步运行的。
步进电动机通过控制脉冲个数来控制角位移量(转子角位移量与电脉冲数成正比),从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电动机转动的速度和加速度(转速与电脉冲频率成正比),从而达到调速的目的。因此,只要通过控制输入脉冲的数量、频率以及电动机绕组通电相序就可以获得所需的转角、转速及转向。因此步进电动机具有以下特点:
1)来一个脉冲,转一个步距角。
2)控制脉冲频率,可控制电动机转速。
3)改变脉冲顺序,可改变转动方向。
现在比较常用的步进电动机包括反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)和单相式步进电动机等。
永磁式步进电动机一般为两相,转矩和体积较小,步距角一般为7.5°或15°;
反应式步进电动机一般为三相,可实现大转矩输出,步距角一般为1.5°,但噪声和振动都很大。反应式步进电动机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
混合式步进电动机是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步距角一般为1.8°而五相步距角一般为0.72°,这种步进电动机的应用最为广泛。
感应子式电动机以相数可分为:二相电动机、三相电动机、四相电动机、五相电动机等。以机座号(电动机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
2.步进电动机工作原理
步进电动机的工作原理实际上是电磁铁作用的原理,磁力线总是力图从磁阻最小的路径通过,因此会在磁力线扭曲时产生切向力,而形成磁阻转矩,使转子转动。如图11-11所示。
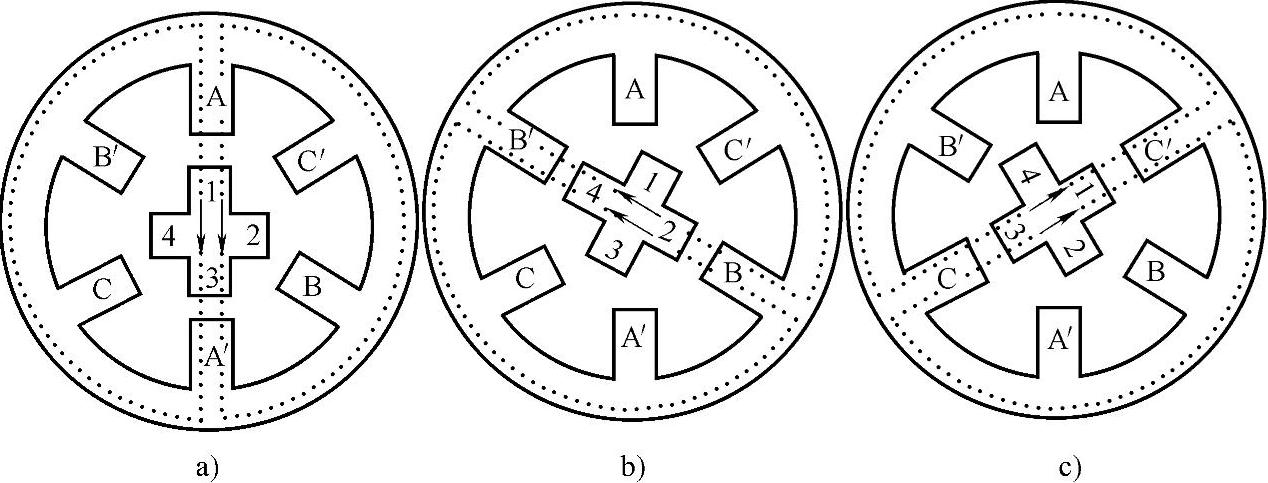
图11-11 步进电机工作原理
在图11-11a中,线圈A-A′得电而产生电磁力,该电磁力将电枢上的齿1-3与A-A′对齐。在图b中,线圈B-B′通电而产生电磁力,由于之前图A中离B-B′最近的齿为2-4,所以在电磁力的作用下,使电枢齿2-4与B-B′对齐。于是步进电动机电枢转动了一个角度。在图c中:线圈C-C′得电而产生电磁力,由于之前图B中离C-C′最近的齿为1-3,所以在C-C′电磁力的作用下,电枢齿1-3与C-C′对齐,于是步进电动机又转过了一个角度。如此按照A-B-C的相序不停的轮流导通,转子便不停地沿顺时针方向转动;如果通电相序发生改变,按照A-C-B的相序工作。
3.步进电动机的技术指标
(1)步进电动机的静态指标及术语
1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电动机转过一个齿距角所需脉冲数,以四相电动机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式,即A-AB-B-BC-C-CD-D-DA-A。
3)步距角:对应一个脉冲信号,电动机转子转过的角位移用θs表示。
式中 Zr——转子齿数;
c——状态系数;(https://www.xing528.com)
m——每个通电循环周期的拍数。
当采用单三拍或双三拍运行时,c=1;当采用单、双六拍运行时,c=2。
以常规二、四相,转子齿为50齿电动机为例。四拍运行时步距角为θ=360°/(50×4)=1.8°(俗称整步),八拍运行时步距角为θ=360°/(50×8)=0.9°(俗称半步)。
实用步进电动机步距角多为3°和1.5°。为获得小步距角,电动机的定子、转子都做成多齿。
(2)步进电动机常用动态指标及术语
1)步距角精度:步进电动机每转过一个步距角的实际值与理论值的误差。步距角精度用百分比表示为误差/步距角∗100%。不同运行拍数其值不同,按四拍运行时应在5%之内,八拍运行时应在15%以内。
2)失步:电动机运转时运转的步数,不等于理论上的步数,称之为失步。
3)失调角:转子齿轴线偏移定子齿轴线的角度,电动机运转必定存在失调角,由于失调角所产生的误差,采用细分驱动是不能解决的。
4)最大空载起动频率:电动机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
5)电动机正反转控制:当电动机绕组通电时序为AB-BC-CD-DA时为正转,通电时序为DA-CD-BC-AB时为反转。
4.PLC运动控制技术控制对策
当步进驱动器接收到一个脉冲信号,它就驱动步进电动机按设定的方向转动一个固定的角度,它的旋转是以固定的角度一步一步运行的。
因此在驱动时,可以通过控制脉冲的数量来控制角位移量,从而来达到精确定位的目的。同时可以通过控制脉冲频率来控制电动机转动的速度和加速度,从而达到控制调速的目的。改变脉冲顺序,可改变转动方向。控制框图如图11-12所示。

图11-12 步进电动机控制框图
在三菱FX系列PLC中有两个脉冲发生器,分别为Y0与Y1,它们所产生的是一串串频率与数量可调的脉冲串(方波),如图11-13所示,如果我们直接用PLC输出的脉冲串去控制步进电动机,很显然是不能实现步进电动机的每相绕组轮流得电。如果每相绕组不能轮流得电,当然步进电动机就不会转动。为了解决这个问题,于是便出现了步进驱动器这个器件。
步进驱动器:步进驱动器的功能简单地说就是从外部控制器接收脉冲信号(PULS)和方向信号(DIR),然后进行脉冲分配和驱动放大,最后将处理好的信号输出给步进电动机。另外步进电动机在停止时通常有一相绕组得电,电动机的转子被锁住,所以当需要转子松开时可以使用脱机信号(FREE)或让步进驱动器断电。步进电动机驱动器连接如图11-14所示。

图11-13 PLC可调脉冲串
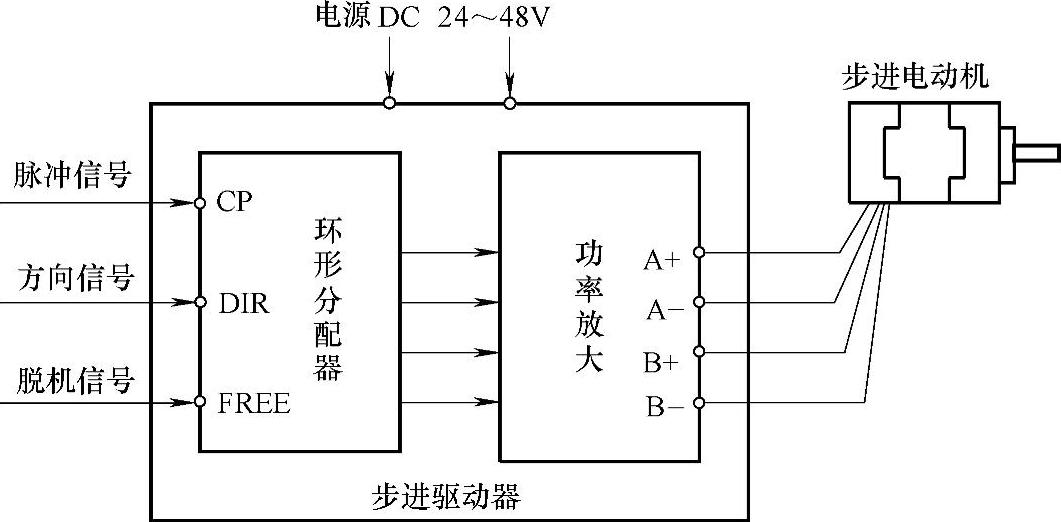
图11-14 步进电动机驱动器连接图
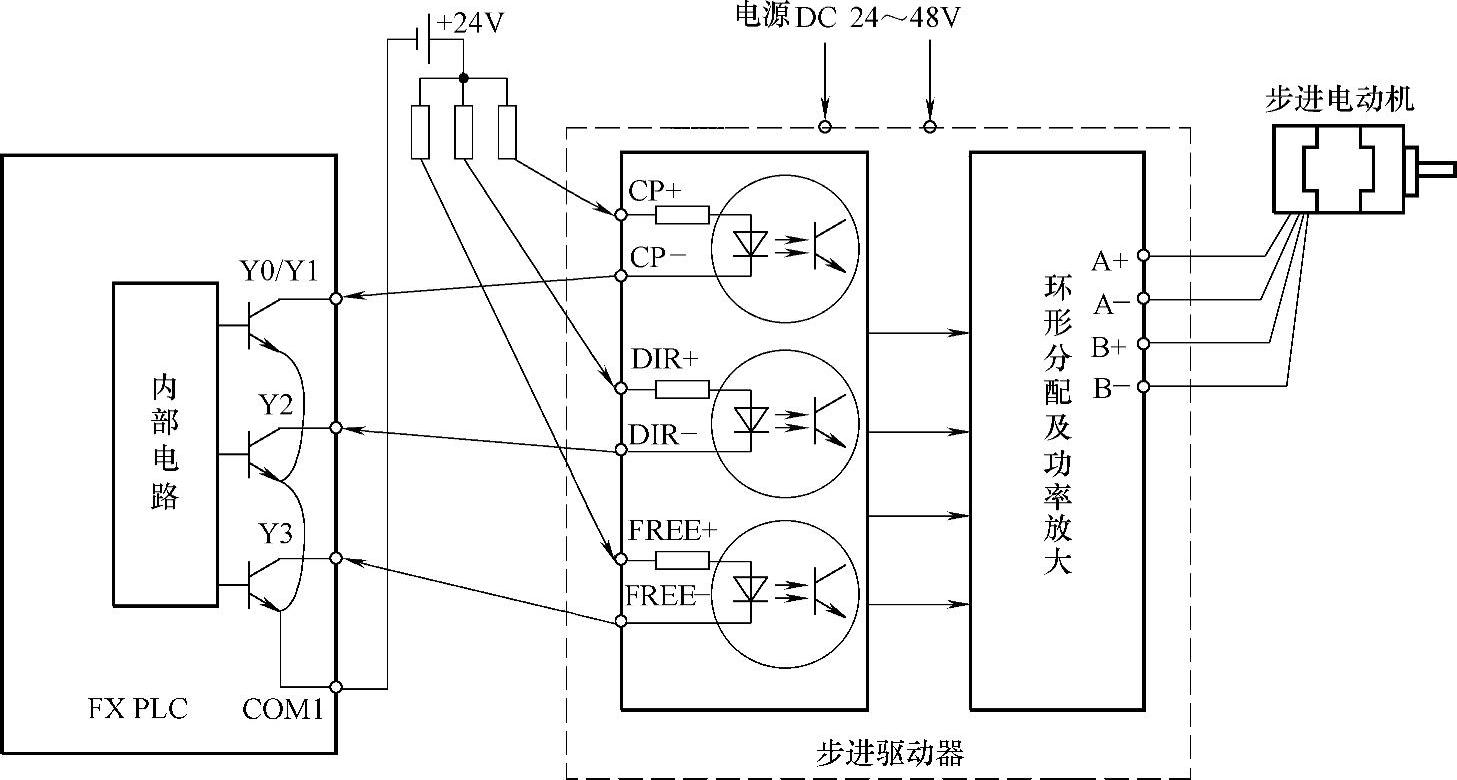
图11-15 步进电动机与PLC连接图
当用PLC来控制步进电动机时,在程序中主要控制三点:分别是脉冲数量的多少来决定步进电动机转动的角度,方向信号的有无来控制步进电动机的转动方向(电动机正向运行时给方向信号,反向运行时不用给方向信号),脉冲的频率来控制步进电动机转动的速度。步进电动机与PLC连接如图11-15所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。