



1.概述
伺服电动机又称执行电动机,如图11-3所示。其功能是将输入的电压控制信号转换为轴上输出的角位移和角速度,驱动控制对象。伺服电动机可控性好,反应迅速。是自动控制系统和计算机外围设备中常用的执行元件。
三菱交流伺服主要有MR-J2、MR-E、MR-H等系列产品,本书以下主要介绍MR-J2系列产品的使用。
三菱交流伺服系统的控制模式有位置控制,速度控制和转矩控制3种模式。还有位置/速度控制、速度/转矩控制、转矩/位置控制这些切换控制方式可供选择。本伺服放大器应用领域广泛,不但可用于工作机械和一般工业机械等需要高精度位置控制和平稳速度控制的应用,也可用于速度控制和张力控制的领域。
此外,还有RS-232C和RS-422串行通信功能。通过安装有伺服设置软件和个人计算机,就能进行参数设定、试运行、状态显示和增益调整等操作。
图11-3 伺服电动机
MELSERVO-J2-Super系列的伺服电动机编码器采用了分辨率为131072脉冲/转的绝对位置编码器,所以比MELSERVO-J2系列具有进行更高精度控制的能力。只要在伺服放大器上另加电池,就能构成绝对位置系统,这样在原点经过设置后,当电源重新投入使用时或发生报警后,不需要再次原点复归也能继续工作。
MR-J2S系列伺服电动机接线根据控制的功能不同有不同的接线,有位置、速度、转矩控制三种模式。其中位置控制模式的接线如图11-4所示。

图11-4 三菱伺服系统位置控制模式接线图
图11-4中各标注如下:
1)为防止触电,须将伺服放大器保护接地(PE)端子连接到控制柜保护接地端子。
2)二极管的方向不能接错,否则紧急停止和其他保护电路可能无法正常工作。
3)必须安装紧急停止开关(常闭)。
4)CN1A、CN1B、CN2和CN3为同一形状,如果将这些接头接错,可能会引起故障。
5)外部继电器线圈中的电流总和应控制在80mA以下。如果超过80mA,I/O接口使用的电流应由外部提供。
6)运行时,异常情况下紧急停止信号(EMG)、正向/反向行程末端(LSP、LSN)与SG端之间必须接通(常闭触点)。
7)故障端了(ALM)在无报警(正常运行)时与SG之间的接通的,OFF(发生故障)时请通过程序停止伺服放大器的输出。
8)同时使用模拟量输出通道1/2和个人计算机通信时,请使用维护用接口卡(MR-J2CN3TM)。
9)同名信号在伺服放大器内部是接通的。
10)指令脉冲串的输入采用集电极开路的方式,差动驱动方式为10m以下。
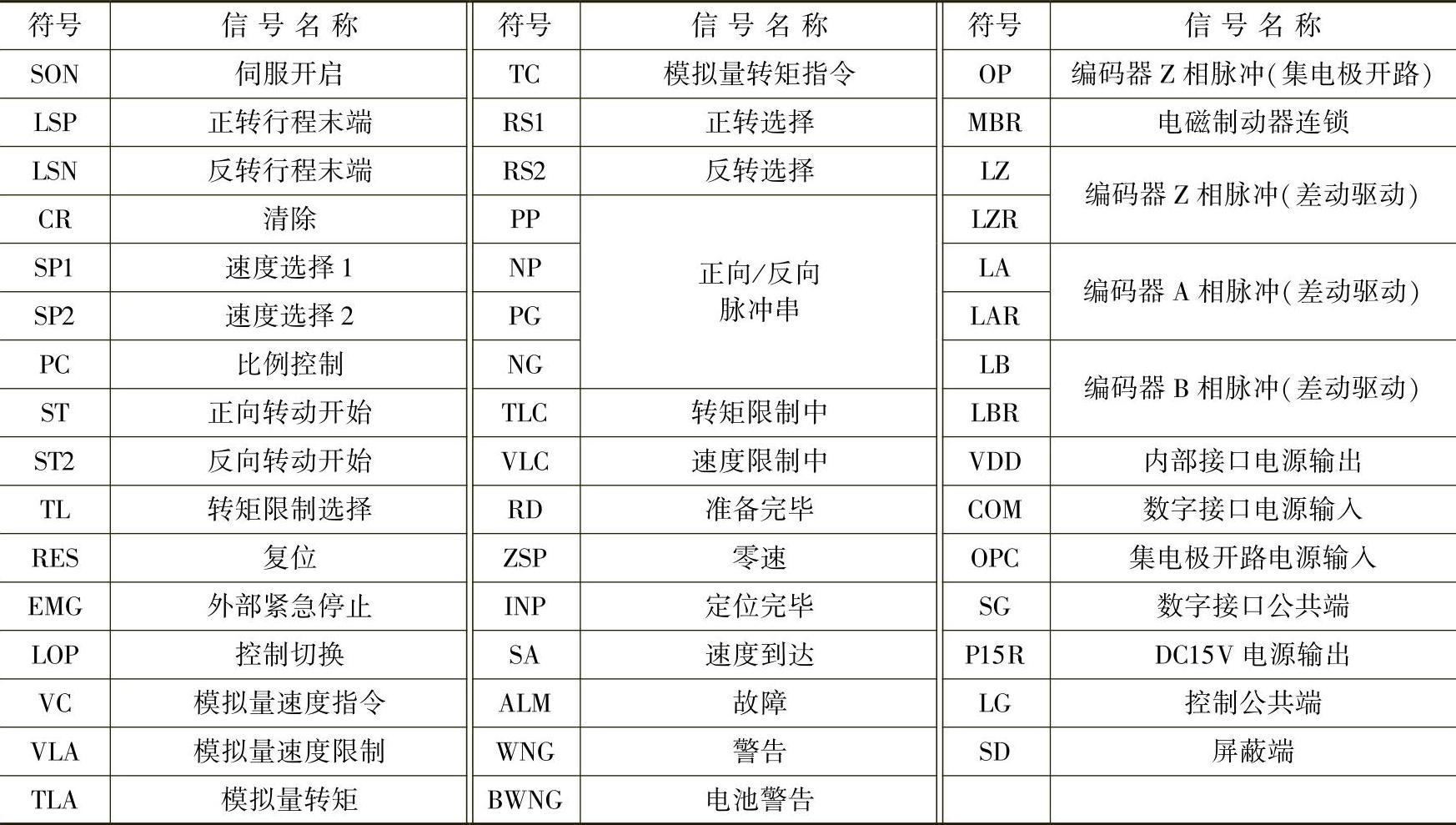
2.I/O信号
三菱MR-J2系列伺服控制器信号端子分布如图11-5所示。各端子符号名称见表11-1所示,有关信号的名称相关功用的详细阐述请读者参考伺服电动机使用手册。
表11-1 三菱伺服端子符号名称
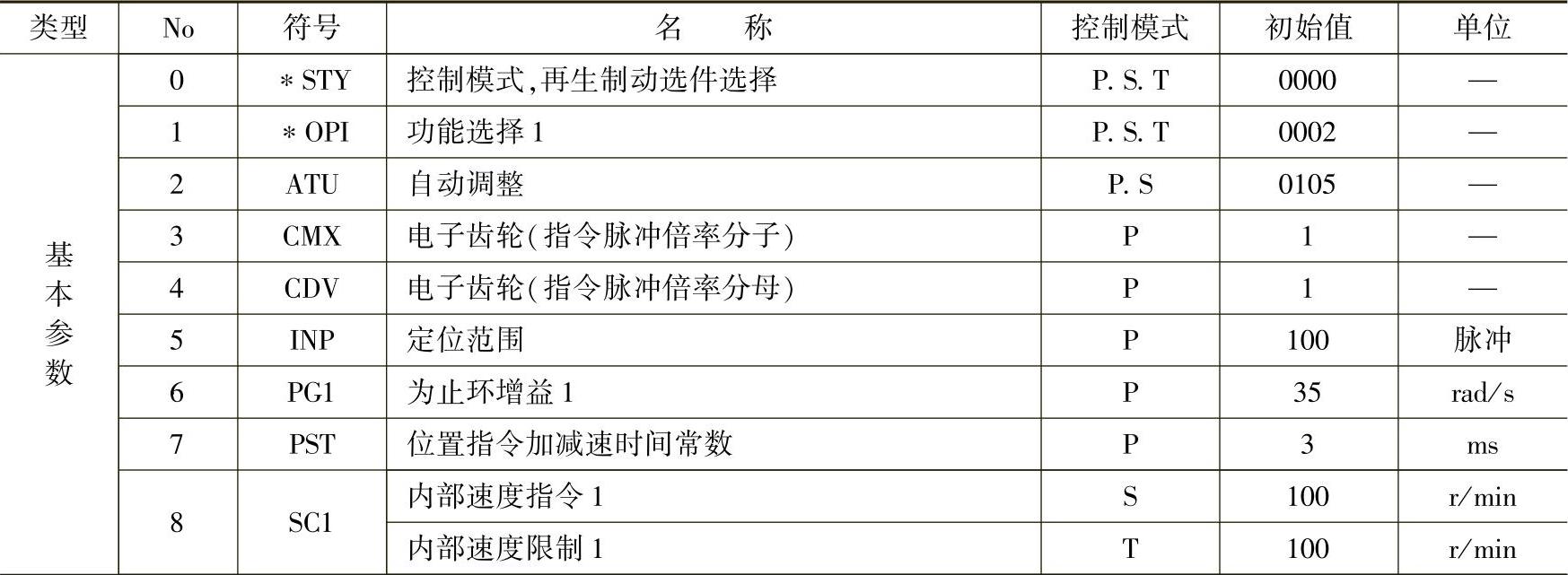
3.伺服电动机控制参数
三菱伺服电动机参数根据参数的安全系数和使用频度,分为基本参数、扩展参数1(No.20~No.49)和扩展参数2(No.50~No.84)。出厂状态下,用户可以修改基本参数,不能修改扩展参数。只是在必须进行增益调整等细微调整时,修改参数No.19后,才可以对扩展参数进行修改。三菱伺服电动机基本参数见表11-2。
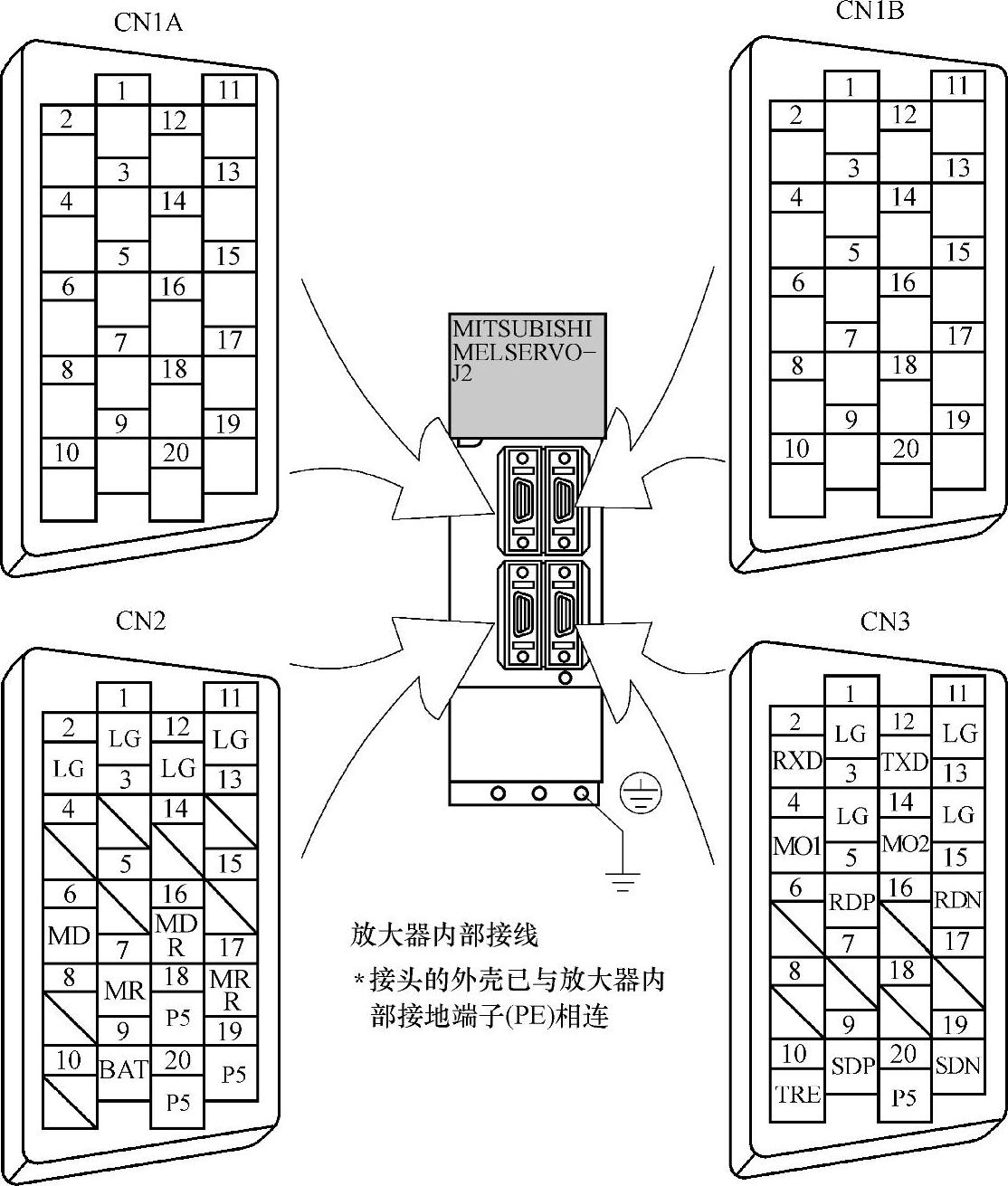
图11-5 三菱MR-J2系列伺服控制器信号端子分布图
三菱伺服电动机的参数可以通过三菱伺服设置软件SETUP-154C进行设置。
注意:
1)用户不能过频地调整和改变伺服电动机的参数,有可能导致伺服运行不稳定。
2)在表中带有∗的参数在修改后一定要将电源断开,并重新接通电源,修改的参数才会生效。
3)表11-2中控制栏中记号的内容表示如下:P—位置控制模式;S—速度控制模式;T—转矩控制模式。
表11-2 三菱伺服电动机基本参数表
(续)
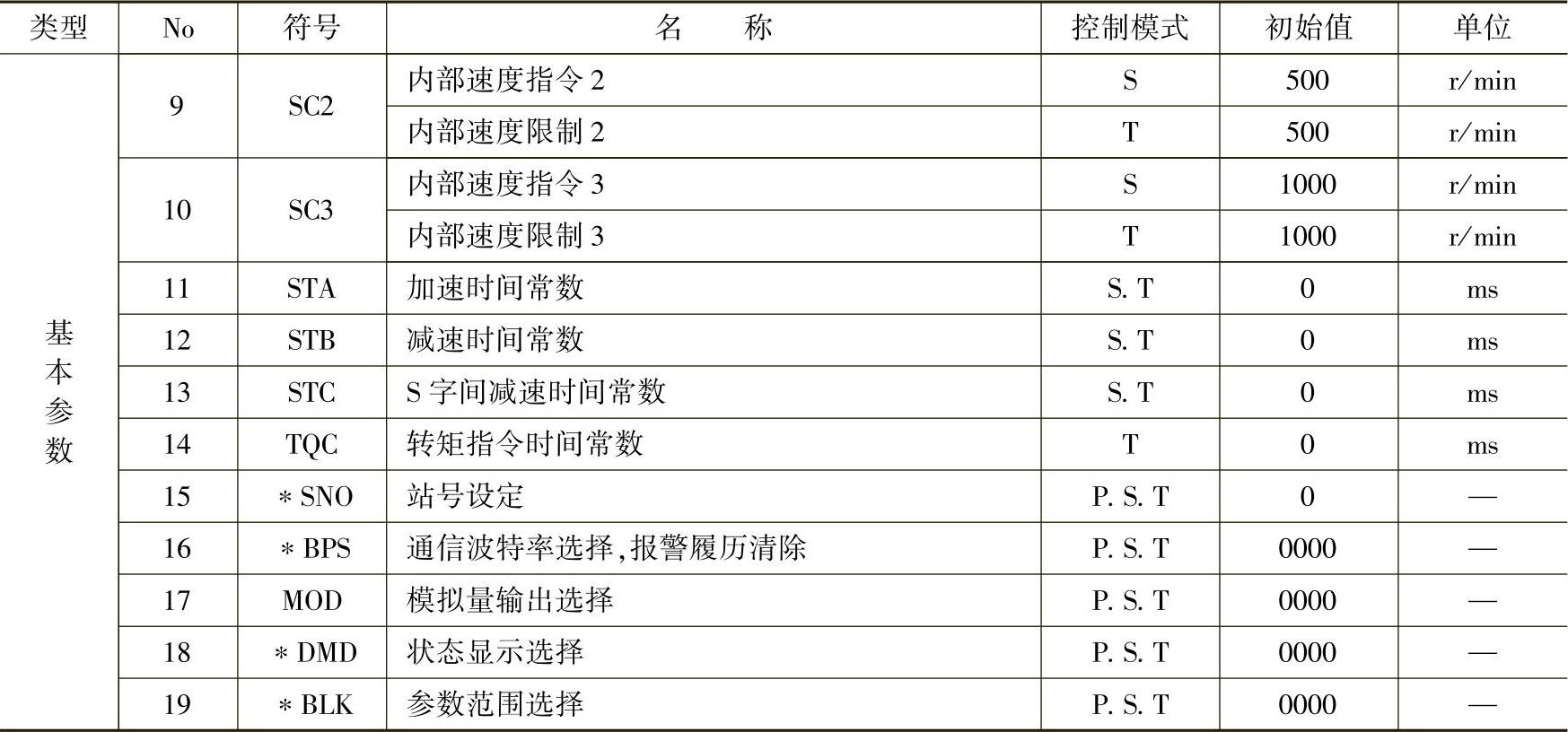
注:1.设定值“0”对应伺服电动机额定速度。
2.伺服放大器不同时初始值也不同。
现将表中常用参数简单介绍如下:(https://www.xing528.com)
1)No.0用于选择控制模式和再生制动,各位设置意义如图11-6所示。

图11-6 参数No.0各位设置意义
2)No.3和No.4:电子齿轮分子和分母的设定。
①电子齿轮的概念:对于输入的脉冲,可以乘上任意的倍率使电动机运行。示意如图11-7所示。
电子齿轮的设定范围为1/50<CMX/CDX<500。否则会导致伺服电加减速时发出噪声,或者不按照设定的速度和加减速时间常数运行电动机。
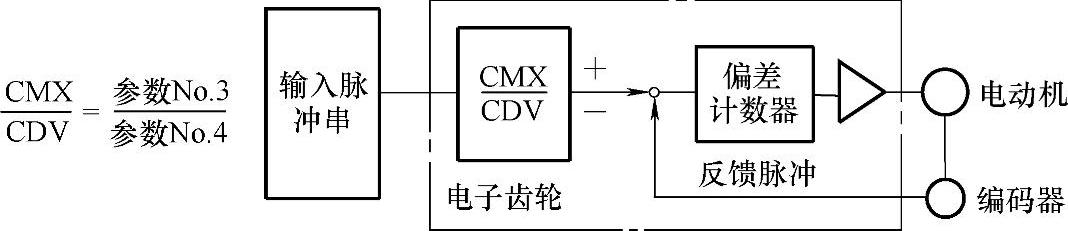
图11-7 电子齿轮的概念示意图
②计算示例
【例11-1】如图11-8所示,1个脉冲相当于10μm进给量的场合。机械规格如下:滚珠丝杆进给量Pb=10mm,减速比n=1/2;伺服电动机编码器分辨率Pt=131072脉冲/转,则电子齿轮的计算方法如下。

根据计算,所以设定CMX=32768 CDV=125
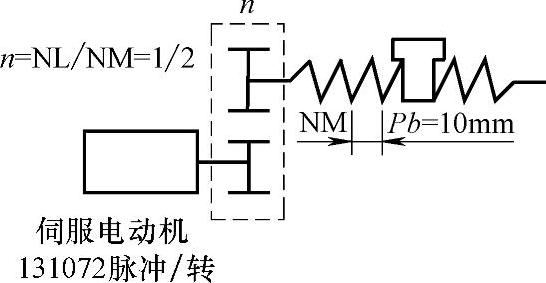
图11-8 例1图
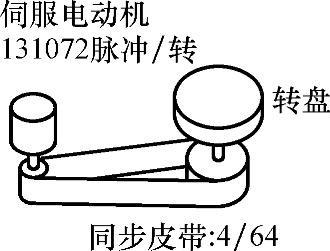
图11-9 例2图
【例11-2】如图11-9所示,1个脉冲相当于0.01°进给量的场合。机械规格如下:转盘360°/转,减速比为n=4/64,伺服电动机编码器分辨率Pt=131072(脉冲/转),则电子齿轮的计算的方法如下。

因为CMX的值超出了设定范围,所以将CMX和CDV约分,直到两个值在设定范围以内,小数点后面四舍五入。

所以设定:CMX=26214 CDV=450
式中 Pb——滚珠丝杆进给量;
n——减速比;
Pt——伺服电动机编码器分辨率(脉冲/转);
Δℓ0——每次脉冲进给量(mm/脉冲);
ΔS——电动机每转对应的进给量(mm/转);
Δθ°——每脉冲对应有角度(°/脉冲);
Δθ——每转对应的角度(°/转)。
3)No.15站号设定:用于设定串行通信时的站号,每一台伺服放大器应设定一个唯一的站号。如果多个伺服放大器设定为同一站号时,不能进行正常的通信。通常首台伺服放大器站号设为“0”站。
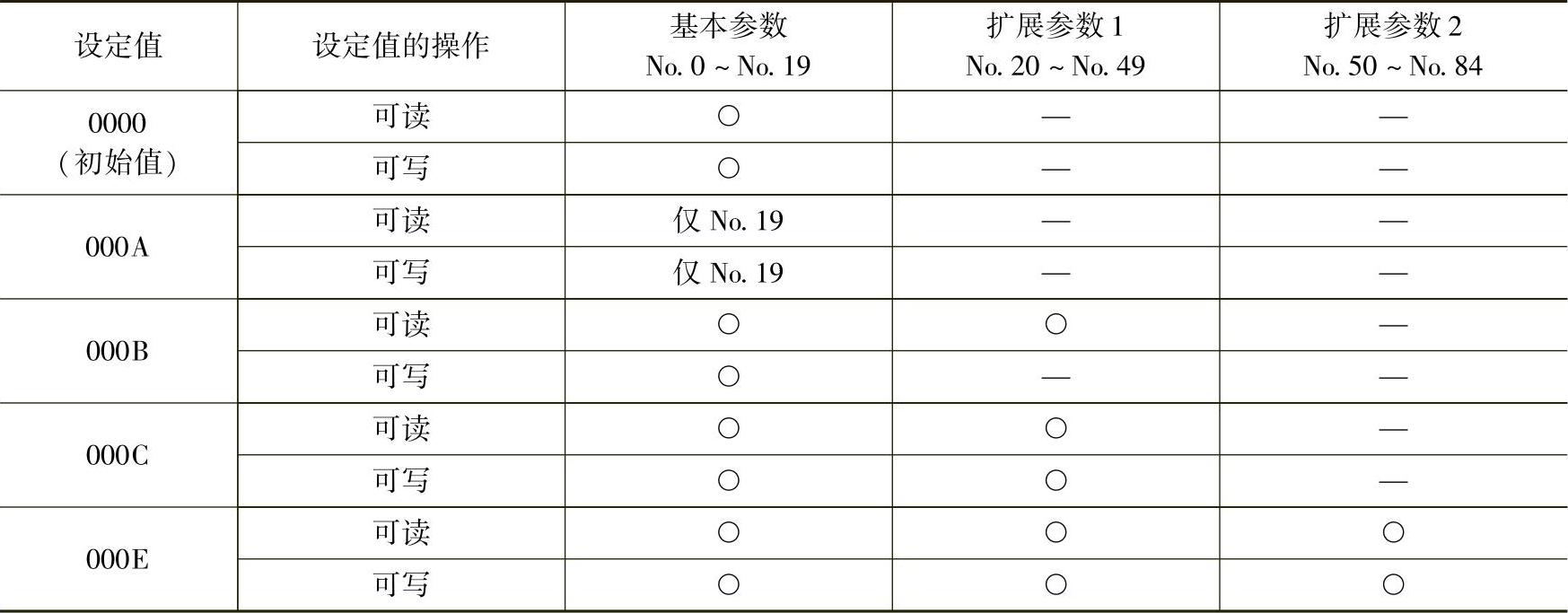
4)No.19参数范围选择:用于选择参数的可读范围和可写范围。设定值的意义见表11-3,其中带○的表示可操作的参数。建议设为000E。
表11-3 No.19各位设定意义表
其他参数的名称和功能读者请参考使用手册。
4.MR-J2系列伺服放大器控制操作
MR-J2系列伺服放大器通过伺服放大器上面的5位7段LED显示器,可进行状态显示和参数设定。显示器可用以设定运行参数、故障诊断及确认运行状态。
按一次“MODE”、“UP”、“DOWN”开关,按图11-10所示操作流程画面进行操作。
扩展参数的读写,可通过参数No.19(参数范围选择)的设定,使读出和写信号生效。
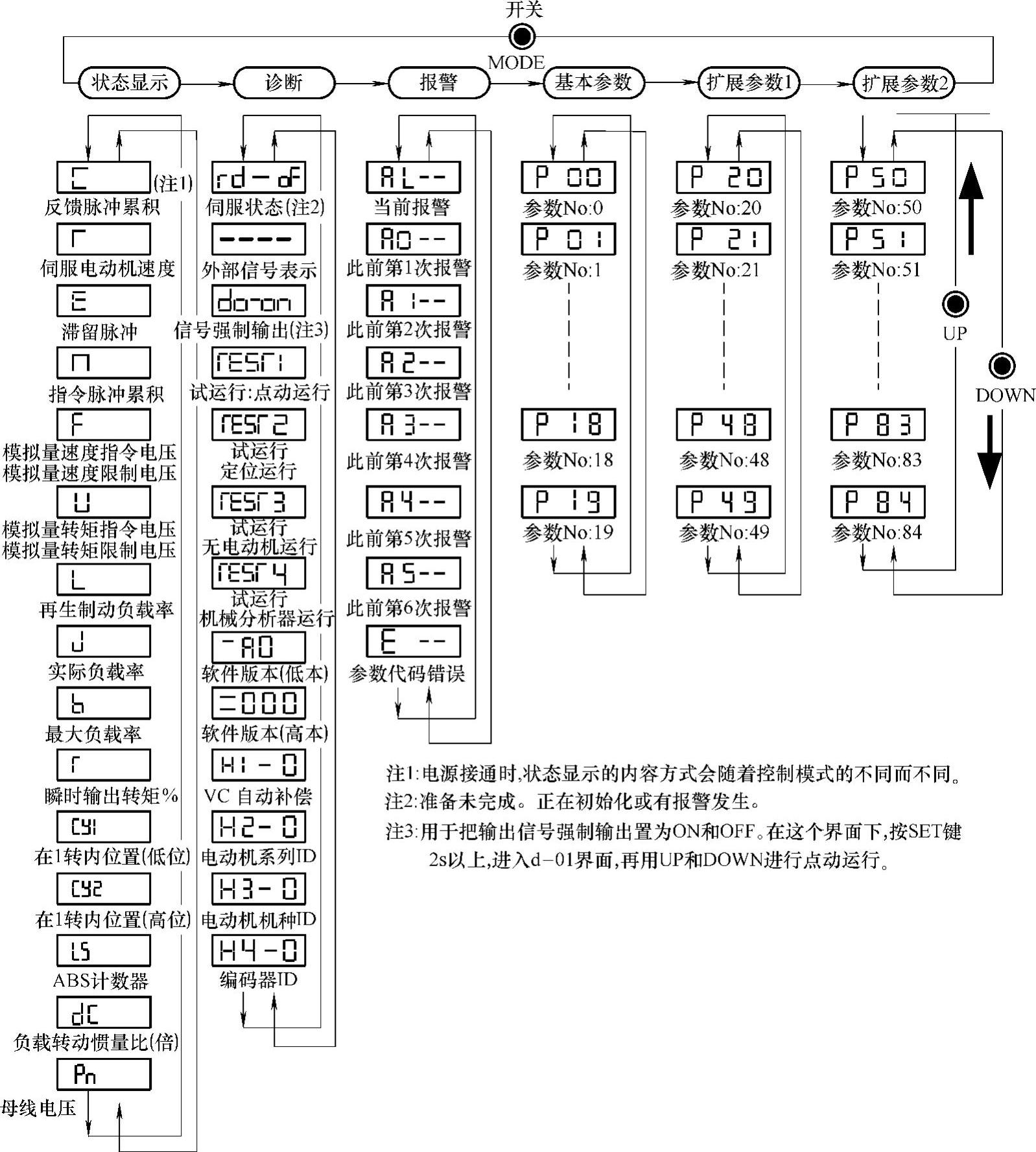
图11-10 伺服放大器操作流程画面
运行时5位7段LED显示器显示伺服的状态,并通过UP/DOWN按钮可以任意改变显示的内容。选取了显示器的内容后,就会出现相应的符号,这时按SET按钮,数据就会显示出来。此外在各模式之间切换可以按MODE键。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。