



SIEMENS子程序库和模板程序未提供斗笠式刀库换刀控制的子程序,下述的子程序SBR22是用于此类刀库换刀控制的程序典例。SBR22分为T代码处理、M06代码处理以及卸刀、选刀、装刀控制,手动刀库回转,PLC输出处理等部分,说明如下。
1.编程元件定义
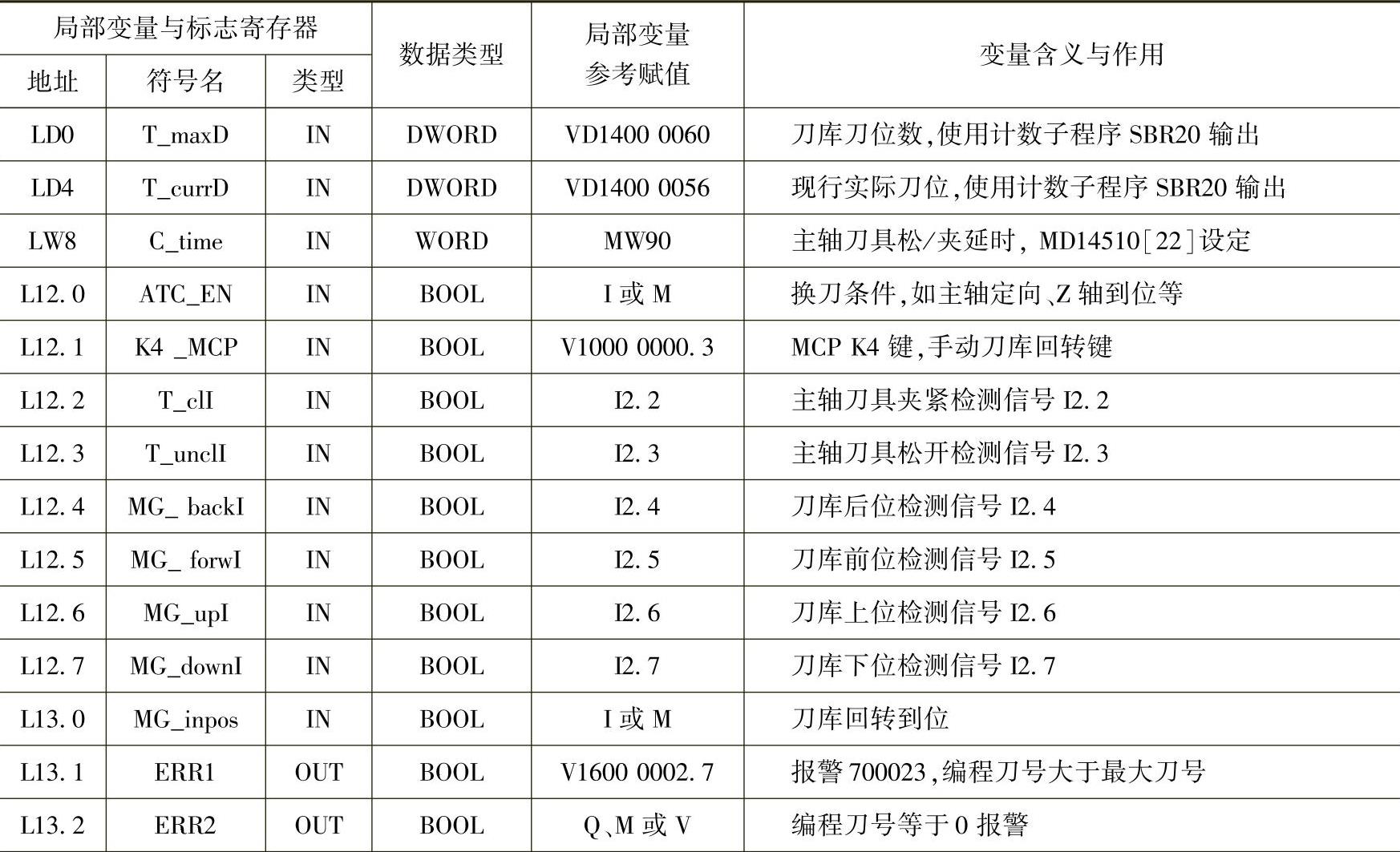
子程序SBR22的局部变量定义、调用时的变量赋值要求及子程序所占用的标志寄存器、定时器等编程元件含义如表9.1-3所示。
表9.1-3 SBR22编程元件定义表
(续)
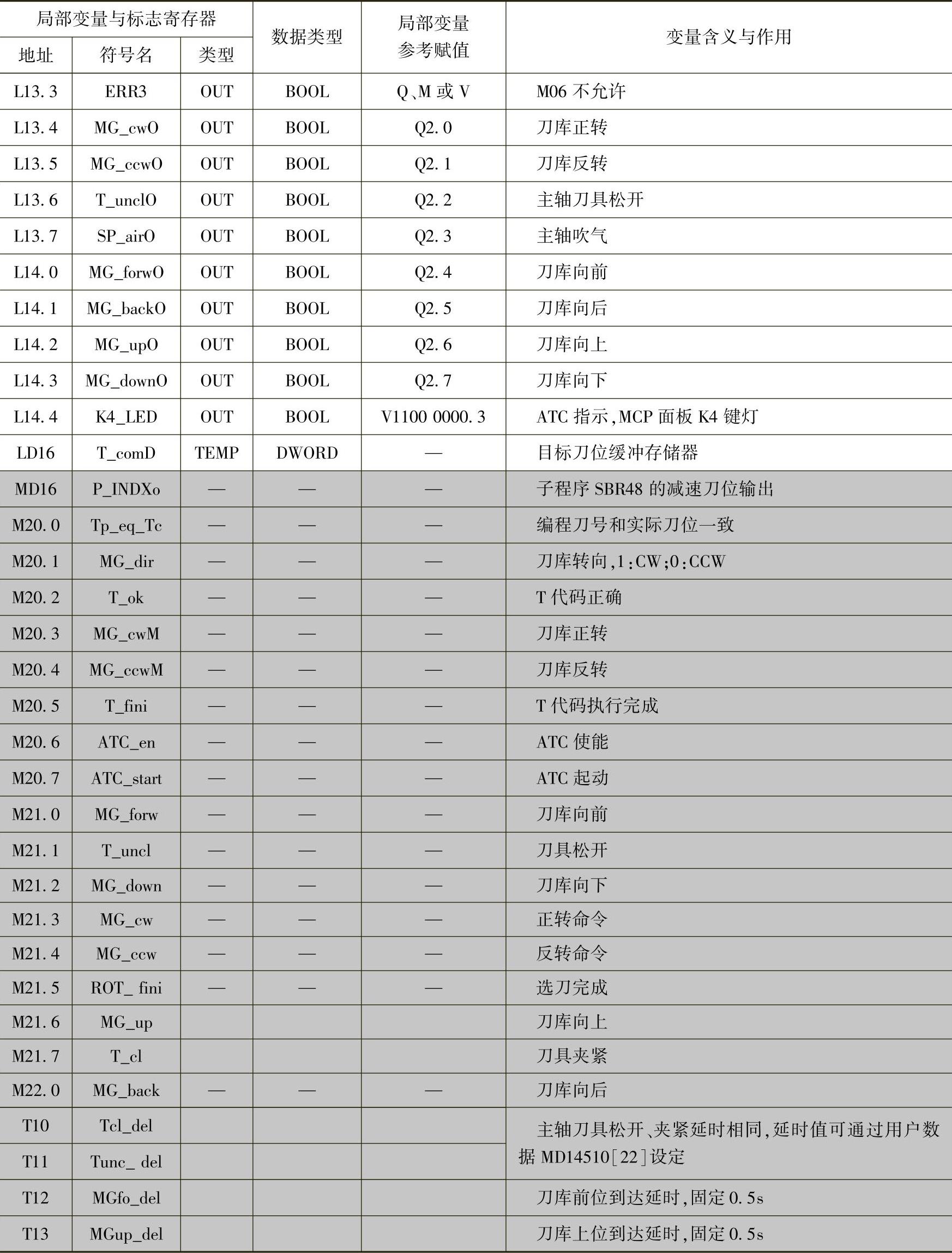
子程序SBR22需要调用刀架捷径选择子程序SBR48,并占用用户程序用的6字节PLC标志寄存器MB16~MB21和4个定时器T10~T13。
2.T代码处理程序
斗笠式刀库自动换刀的T代码处理程序设计如图9.1-5所示,程序的设计思路与液压刀架相同(参见8.2节)。
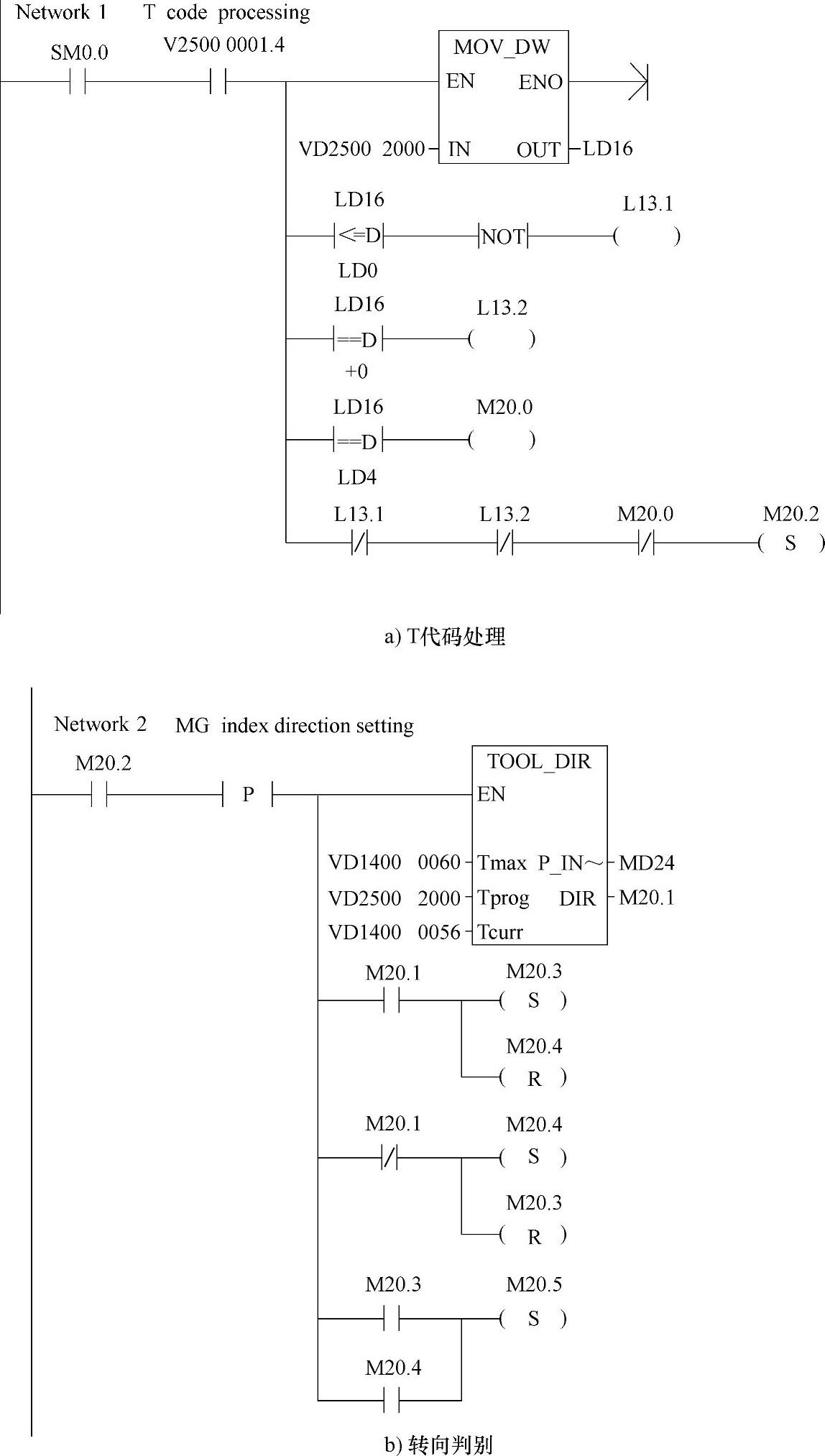
图9.1-5 T代码处理程序
图9.1-5a所示Network1用于编程T代码的判别,它可对CNC加工程序中的T代码进行校验。如T代码大于刀库最大刀位数,输出变量L13.1=1;如T代码等于0,输出变量L13.2=1。变量L13.1、L13.2可通过PLC报警程序在CNC上显示相应的报警。如编程的T代码与现行实际刀位一致,则M20.0=1;如编程T代码正确、刀具需要交换,则标志M20.2置1。
图9.1-5b所示的Network2用来产生刀库捷径转向。当M20.2=1时,Network2将调用子程序SBR48,在M20.3(正转)或M20.4(反转)上得到刀库的捷径转向。程序中的M20.5为T代码处理完成标志,该信号是M06自动换刀的起动条件。
3.M06处理与卸刀控制程序
斗笠式刀库自动换刀的M06代码处理和卸刀控制程序如图9.1-6所示。

图9.1-6 M06代码处理和卸刀控制程序
Network3用于M06代码的处理。当CNC输出M06代码V25001000.6及MF信号V2500 0000.0时,如主轴定向、Z轴到位等换刀起动条件具备(L12.0=1),则ATC使能信号M20.6、CNC通道进给使能禁止信号V32000006.0、读入使能禁止信号V32000006.1将置1,CNC进入辅助功能执行等待状态;如自动换刀起动条件不具备(L12.0=0),则报警输出变量L13.3为1,L13.3可通过子程序调用指令的赋值,通过其他PLC程序,使机床产生相应的报警。当ATC使能信号M20.6为1时,如T代码已处理完成,则ATC起动信号M20.7将为1,下述的自动换刀程序将被起动。
Network4用来取出机床主轴上的刀具(卸刀)。考虑到换刀完成、刀库返回到达后位瞬间的检测开关信号状态和刀库前移时相同等情况,为防止刀库出现重复动作,该部分程序需要用回转完成信号M21.5的常闭触点进行互锁。
Network4在ATC起动信号M20.7为1时,如主轴刀具夹紧(L12.2=1)、刀库处于后上位(L12.4=1、L12.6=1),则刀库前移命令M21.0为1、刀库向后命令M22.0复位。前位到达、检测信号L12.5为1后,经定时器T12延时0.5s,可产生刀具松开命令M21.1、复位刀具夹紧信号M21.7。刀具松开、检测信号L12.3为1后,经定时器T10延时用户数据MD14510[22]设定的时间,将产生刀库向下命令信号M21.2、复位刀库向上信号M21.6。(https://www.xing528.com)
M21.0、M21.1、M21.2可通过后述的Network9分别使输出变量L14.0、L13.6/L13.7、L14.3为1,以接通刀库前移、刀具松开和主轴吹气、刀库向下电磁阀,控制刀库运动。
4.回转选刀程序
斗笠式刀库的回转选刀控制程序Network5如图9.1-7所示。
Network5在刀库向下(M21.2=1)到达下位(L12.7=1)时,按照Network2生成的转向信号M20.3或M20.4,产生刀库正转或反转命令信号M21.3或M21.4。M21.3、M21.4可通过后述的程序Network9利用输出变量L13.4、L13.5接通刀库正反转继电器,控制刀库回转选刀。
当刀库回转到达目标刀位后,现行实际刀位输入变量LD4将和Network1生成的T代码指令刀号LD16相等,此时,只要刀库到位信号L13.0为1,便可复位转向信号M20.3、M20.4,正/反转命令信号M21.3、M21.4,停止刀库的回转,并将刀库回转完成信号M20.5置为1。
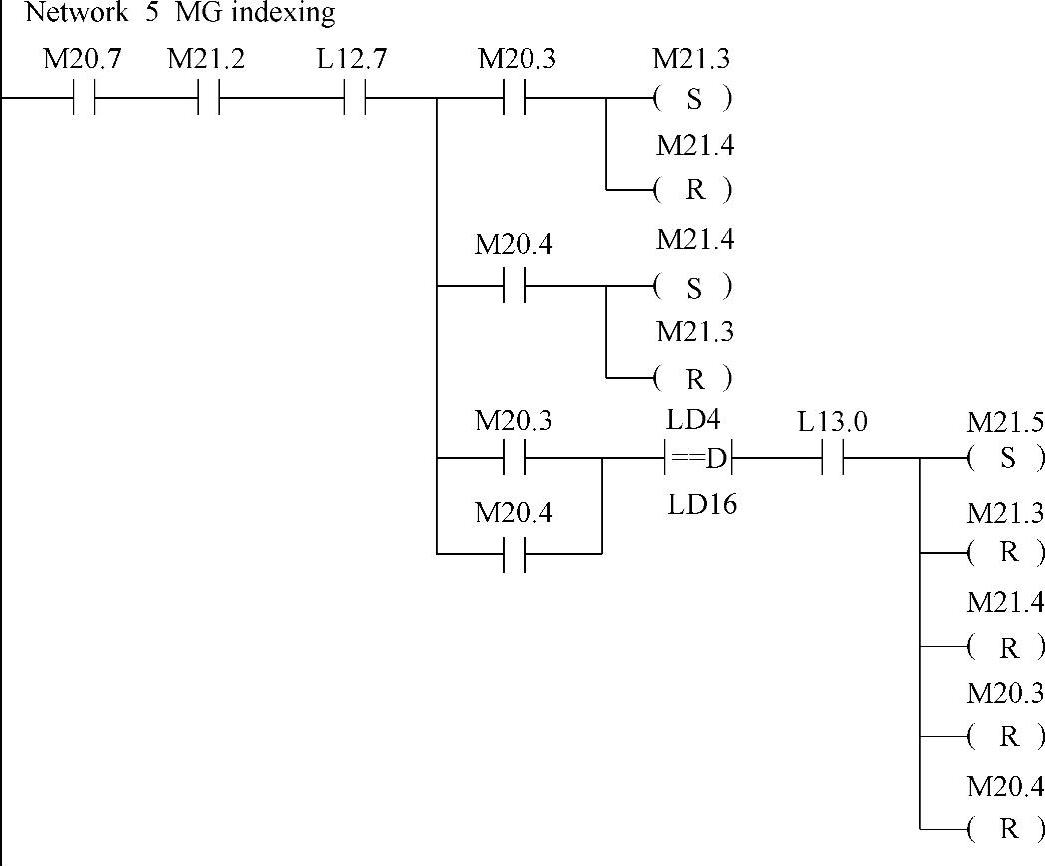
图9.1-7 回转选刀控制程序
5.装刀控制程序
斗笠式刀库的装刀控制程序如图9.1-8所示。Network6用于刀库向上和夹紧控制,Net-work7用于自动换刀结束处理。
Network6在可刀库回转完成后,通过信号M21.5的上升沿,使刀库向上命令信号M21.6置1,并复位刀库向下命令信号M21.2。当刀库到达上位后,检测信号L12.6经定时器T13延时0.5s,将刀具夹紧命令信号M21.7置1,并复位刀具松开信号M21.1。刀具松开到位后,检测信号L12.2经定时器T11延时用户数据MD14510[22]设定的时间,将产生刀库向后命令信号M22.0,并复位刀库向前信号M21.0。
M21.6、M22.0可通过后述的Network9,分别使输出变量L14.2、L14.1为1,以接通刀库向上、后移电磁阀,控制刀库运动;刀具的夹紧只需要复位刀具松开信号M21.1,便可断开刀具松开和主轴吹气电磁阀,夹紧刀具。考虑到换刀完成、刀具夹紧后的检测开关信号瞬间状态和刀库前移到位时相同等情况,为防止刀库动作出错,该部分程序同样需要用回转完成信号M21.5的常开触点互锁。

图9.1-8 装刀控制程序
Network7用于自动换刀结束处理,它可在刀库后移到达后位时,利用刀库后位检测信号L12.4的上升沿,复位刀库向后M22.0、自动换刀起动M20.7命令信号;清除刀库回转完成信号M21.5;复位CNC的通道进给使能禁止信号V32000006.0和读入使能禁止信号V3200 0006.1;清除T代码处理信号M20.5、M20.6、M20.2;结束M06指令。
6.手动回转和输出控制程序
斗笠式刀库的手动刀库回转和输出控制程序如图9.1-9所示。Network8用于手动刀库回转,Network9用于输出控制。
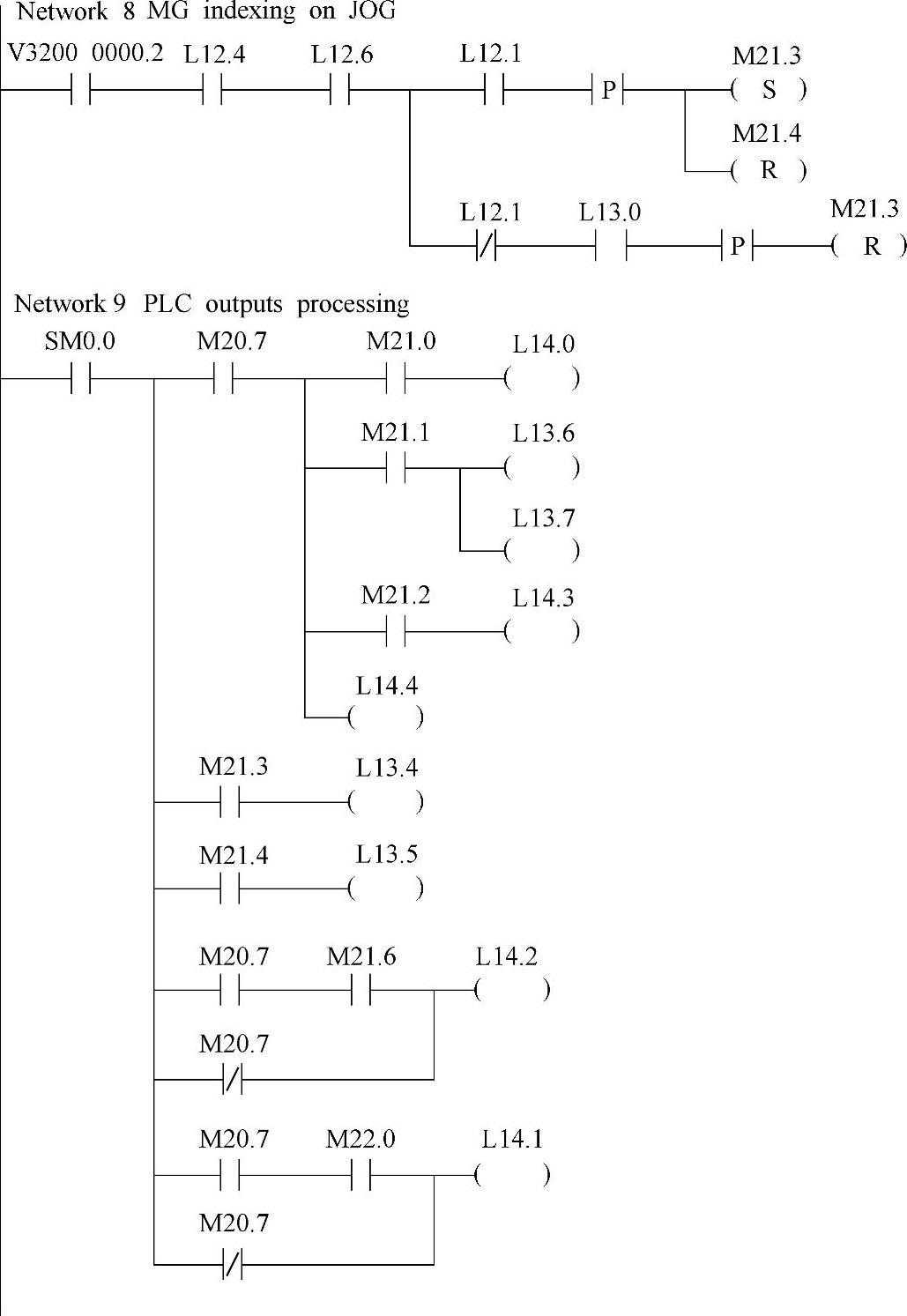
图9.1-9 手动刀库回转和输出控制程序
手动刀库回转一般用于刀库的刀具手动安装,Network8可在CNC选择JOG操作(V32000000.2=1)、刀库处于后、上位(L12.4、L12.6=1)时,通过操作MCP的K4键(L12.1)直接将刀库正转输出信号M21.3置1,使刀库正转。为了保证刀库的正确定位,刀库手动回转时的正转输出M21.3需要在松开K4键、刀库回转到位信号L13.0为1时撤销。
PLC输出控制程序Network9可将Network4~Network8的刀库运动控制信号M21.0~M22.0转换为程序的输出变量。其中,电磁阀控制信号刀库前移L14.0、刀具松开/吹气L13.6/L13.7、刀库下移L14.3,只能在自动换刀起动信号M20.7为1时输出;自动换刀指示灯在M20.7为1时输出;刀库的正/反转控制信号L13.6/L13.7可在手动或自动时输出;刀库向上和后移电磁阀控制信号L14.2、L14.1的输出,在自动换刀起动信号M20.7为1时由换刀程序控制,而在自动换刀起动信号M20.7为0时将始终输出1,以便刀库能够在后、上位保持。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。