



1.驱动器控制要求
SIEMENS公司的交流伺服/主轴驱动器一般为模块化结构,驱动器由电源模块、伺服模块和主轴模块等组成。电源模块用来产生伺服/主轴模块逆变主回路的直流母线电压,伺服/主轴模块用来控制伺服/主轴电动机的转速、转矩和电流。
SIEMENS驱动器的电源模块主电压一般为三相AC380/400V,直流主回路采用的是减压起动(又称预充电)、PWM全控整流方式,模块对主电源的通断控制有规定的要求。在传统的SIMODRIVE 611A/D/U/UE等驱动器中,电源模块的通断,一般需要通过PLC程序的控制,按图6.1-1所示的要求,通断控制信号如下。
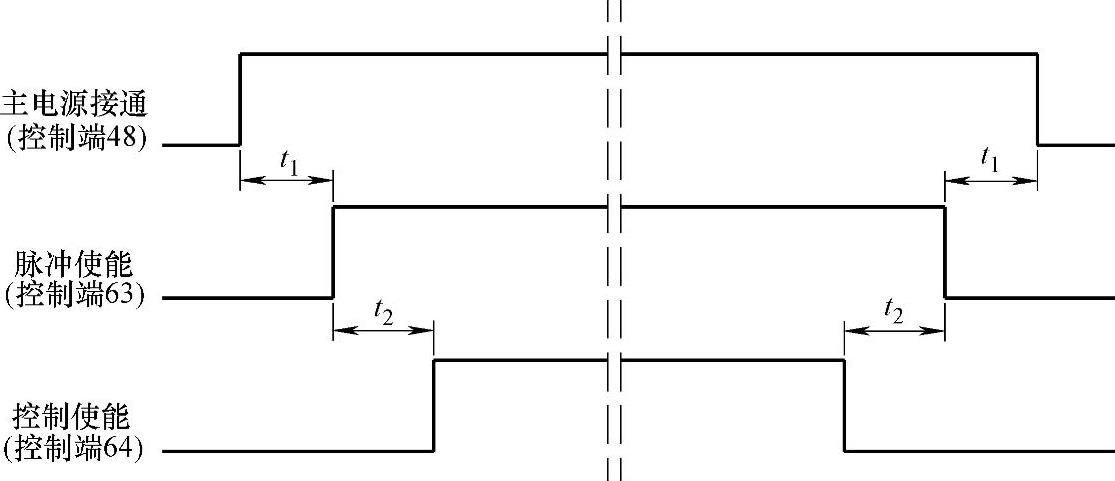
图6.1-1 主电源的通断控制要求
1)主电源通断。SIEMENS驱动器的三相AC380/400V主电源通断,由电源模块内部的主接触器MS、MS1进行控制。主接触器通断控制端(Contactor Control)为48,当该信号接通时,减压起动接触器MS1和主接触器MS接通允许。此时,如加入电源模块脉冲使能信号63,PWM整流回路将在内部电路的控制下,首先接通减压起动(预充电)接触器MS1,使直流母线预充电。然后,通过内部规定的延时,接通主接触器MS,使直流母线达到额定电压。主接触器通断控制端48一旦断开,接触器MS1、MS将无条件断开,整流电路和主电源隔离。主接触器接通是产生直流母线电压的前提条件。因此,起动驱动器时,应首先加入控制信号48;正常关闭驱动器时,信号48应最后断开。
2)脉冲使能。电源模块的脉冲使能(Pulse Enable)控制端63用来使能/禁止整流回路的PWM脉冲。当主接触器通断控制信号48接通时,如加入脉冲使能信号63,整流回路将在PWM电路的控制下,完成直流母线预充电和起动过程,并可对直流母线电压进行自动调整。PWM脉冲是控制整流回路功率管开/关工作的信号,PWM脉冲如果被禁止,整流管将被无条件关闭,伺服和主轴电动机将以最大电流紧急制动。此时,即使主接触器通断控制信号48接通,也不能输出直流母线电压。电源模块的脉冲使能信号具有最高优先级,它通常用于驱动器的急停控制。因此,驱动器起动时,该信号应在信号48接通后首先加入;驱动器正常关闭时,则应提前于控制信号48断开。
3)控制使能。电源模块的控制使能(Control Enable)端64是所有伺服/主轴驱动模块的公共控制端,控制使能信号64一旦被撤销,驱动器所有伺服/主轴模块的速度给定将被直接置0,伺服/主轴电动机可按照正常的加减速参数减速停止。电源模块控制使能信号是驱动器的起动和关闭所有伺服/主轴驱动模块的公共控制信号,驱动器起动时应最后加入;驱动器关闭时应首先断开。
在SIEMENS最新的SINAMICS S120系列驱动器上,为了简化控制电路,驱动器的电源模块只使用驱动器急停控制信号EPM,该信号的作用与电源模块脉冲使能端63类似。
2.控制电路与改进
在802S/C/D模板程序中,驱动器电源通断和CNC急停控制使用的是共同的子程序SBR33(EMG_STOP),并推荐了图6.1-2所示的电源模块控制信号连接电路。
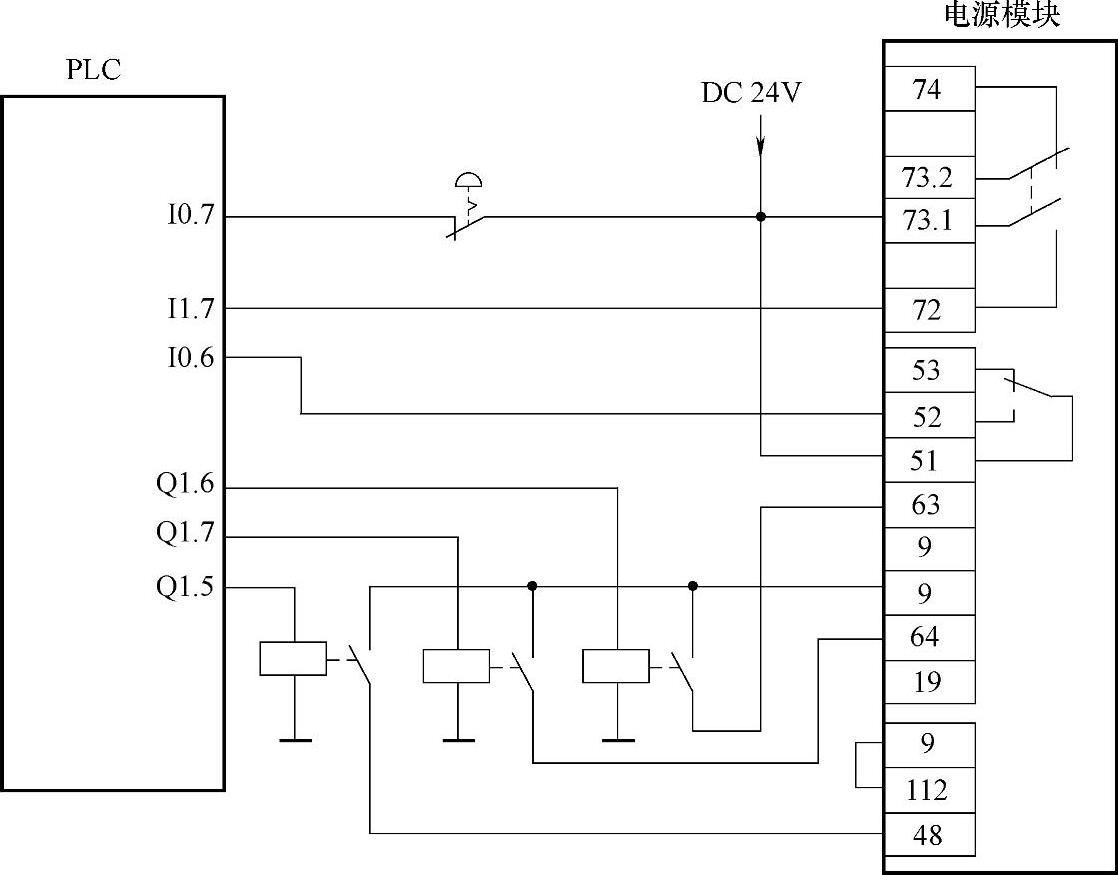
图6.1-2 电源模块控制信号连接电路
图6.1-2中的电源模块输出端72为驱动器“准备好(Ready)”信号,当驱动器主电源接通、正常起动过程结束后,如驱动器无故障,其输出触点将被接通;如果驱动器出现报警,触点将断开。电源模块输出端52为驱动器过热(I2t)信号,驱动器正常工作时触点断开;当驱动器长时间过电流或电动机过热,输出触点将接通。驱动器的准备好信号和过热信号需要连接到PLC的输入端,作为驱动器的控制条件。
需要注意的是,图6.1-2所示的电源模块控制信号连接电路只是供用户参考的原理性电路,子程序SBR33(EMG_STOP)也只是为了满足最低控制要求所设计的程序,它们并没有考虑机电设备安全标准(ISO 13849)对紧急分断(急停)电路的设计要求。因此,在需要贯彻机电设备安全标准的数控机床上,建议使用图6.1-3所示的安全电路,并对子程序SBR33进行相应的修改。

图6.1-3 电源模块信号安全电路(https://www.xing528.com)
ISO 13849安全标准规定:机电设备用于紧急分断(急停)的操作器件(如急停按钮等),必须采用冗余控制的安全电路,并使用符合安全标准的安全电器;紧急分断必须通过满足强制执行条件的电磁执行元件(如安全继电器、接触器等)进行控制,不允许仅仅通过PLC程序的控制实现。
因此,在图6.1-3所示的电路中,用于驱动器急停控制的脉冲使能控制端63,在PLC输出触点中串联了来自安全电路的紧急分断安全触点K1;用于电源模块主接触器控制的控制端48上,则串联了来自安全电路的延时分断安全触点K1。同时,PLC的急停输入I0.7也需要使用来自安全电路的紧急分断安全触点K1进行控制。
以上电路在机床紧急分断时,可通过安全触点K1直接分断驱动器的脉冲使能控制端63,使驱动器进入急停状态。然后,利用紧急分断电路延时断开的安全触点,断开主接触器控制端48。机电设备的电气控制系统安全电路设计有规定的要求,图中的安全触点K1应由符合ISO 13849标准的紧急分断安全电路输出,有关内容可参见《数控机床电气设计典例》一书。
3.PLC程序设计要求
驱动器控制PLC程序的设计同样需要考虑CNC基本控制和通道控制要求。如果使用SI-EMENS模板程序,还需要综合考虑CNC用户数据设定、I/O初始化子程序处理和子程序输入变量的赋值要求。802S/C/D与驱动器控制相关的信号以及它们在PLC程序中的编程地址、作用与功能如表6.1-1所示。
表6.1-1 802 S/C/D与驱动器通断控制相关的接口信号表

4.局部变量定义
为了提高程序设计速度,驱动器控制子程序可以在SIEMENS公司所提供的子程序SBR33(EMG_STOP)基础上进行修改和完善,子程序SBR33使用的局部变量以及使用模板程序时的变量赋值要求如表6.1-2所示,用户程序设计时可继续使用。
表6.1-2 SBR33局部变量一览表

表中的局部变量LW4为SBR33内部变量(TEMP);子程序输入变量(IN)和输出变量(OUT)在调用子程序时需要定义相应的输入和输出。此外,子程序SBR33需要占用1字节PLC的标志寄存器MB119和计数器C31,用户其他程序设计时不能再使用标志寄存器MB119和计数器C31。
在模板程序中,子程序SBR33中的局部变量L2.1为驱动器起动输入,其状态使用的是机床I/O设定子程序SBR62(FILTER)中的输出M104.5(EN_KEYm),该信号在SBR62中的处理程序如图6.1-4所示。

图6.1-4 驱动器起动键的处理程序
程序中的V10000000.0为MCP的用户自定义键K1输入;VW45000034为CNC用户数据MD14510[17]中的驱动器类型设定值,“1”为伺服驱动器,“0”为步进驱动器。因此,在使用伺服驱动器的机床上,M104.5就是MCP面板的K1键输入。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。