



1.平衡单元的工作原理
在采用液压蓄能器直接回收系统(图6-2和图6-3)中,在能量回收和释放过程中,液压蓄能器的压力始终处于动态变化过程中,不管采用流量控制阀还是采用容积调速单元,对原有的操控性始终会产生一定的影响。因此,如图6-39所示,为了克服液压蓄能器压力对执行元件操控性的影响,在原驱动液压缸的基础上再增加一组平衡液压缸和液压蓄能器作为负载的平衡单元,将液压蓄能器压力的变化通过平衡液压缸转换成力的变化直接和驱动液压缸的输出力在动臂上进行耦合。平衡液压缸通过液压蓄能器把动臂的重力平衡,驱动液压缸等效于驱动一个轻负载,其中驱动液压缸无杆腔压力大小由平衡单元液压蓄能器的压力和负载决定。

图6-39 挖掘机平衡单元节能驱动原理图
a)直线运动执行器平衡单元示意图 b)旋转运动执行器平衡单元示意图
目前在叉车、起重机等工程机械得到应用。举升液压缸只需要单方向输出力,液压缸的有杆腔始终通往油箱。当动臂下放时,蓄能器回收动臂势能;动臂上升时,其动臂液压缸无杆腔的压力由负载和蓄能器压力决定。为了保证动臂不会发生扭拉,一般至少需要布置三个液压缸,使液压缸对动臂的驱动力可以对称布置。
针对起重机,芬兰坦佩雷工业大学的Virvalo等提出,利用液压蓄能器-平衡液压缸复合单元回收起重机动臂的下降势能[19~22],系统工作原理如图6-40所示,其中平衡液压缸辅助动臂驱动液压缸共同提升负载,从而降低液压泵的出口压力,并在动臂下降时,将平衡液压缸无杆腔的高压油回收至液压蓄能器。与原液压系统相比,该系统节能20%左右。Nyman也做了大量的类似研究[23]。
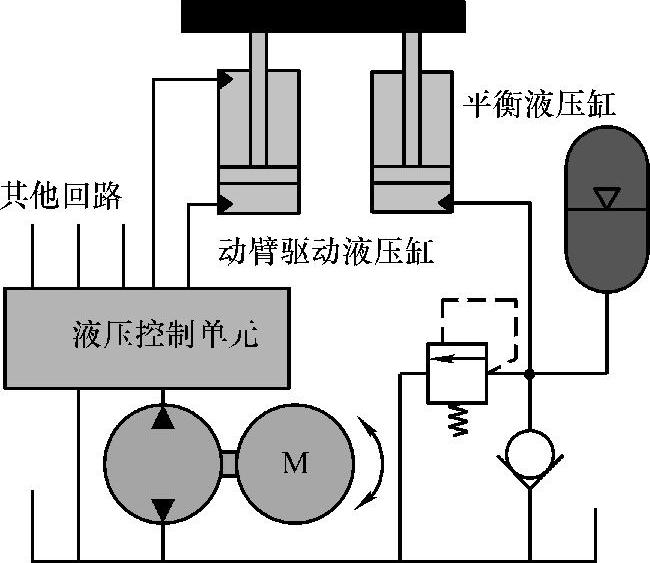
图6-40 基于液压蓄能器-平衡液压缸复合单元的能量回收系统
针对液压挖钢机,Daniel Spri在布鲁塞尔举行的2011年世界工程机械经济论坛上介绍了利勃海尔的能量回收缸ERC(energy recovery cylinder)技术,如图6-41所示。在传统双液压缸的基础上,设置一个气缸来平衡动臂的重力,以降低带负载举升时的发动机输出动力,达到降低能耗的目的。ERC采用空心活塞缸,大大增加气体体积的同时降低了系统的复杂程度。目前ERC技术已经运用于利勃海尔的液压抓钢机上,相比于传统机型发动机装机功率降低了14%,油耗降低了25%,该技术以独特的创新思路,获2010年Bauma创新设计奖,也是气缸首次在工程机械能量回收中的应用。
利勃海尔的ERC原理示意图如图6-41所示。
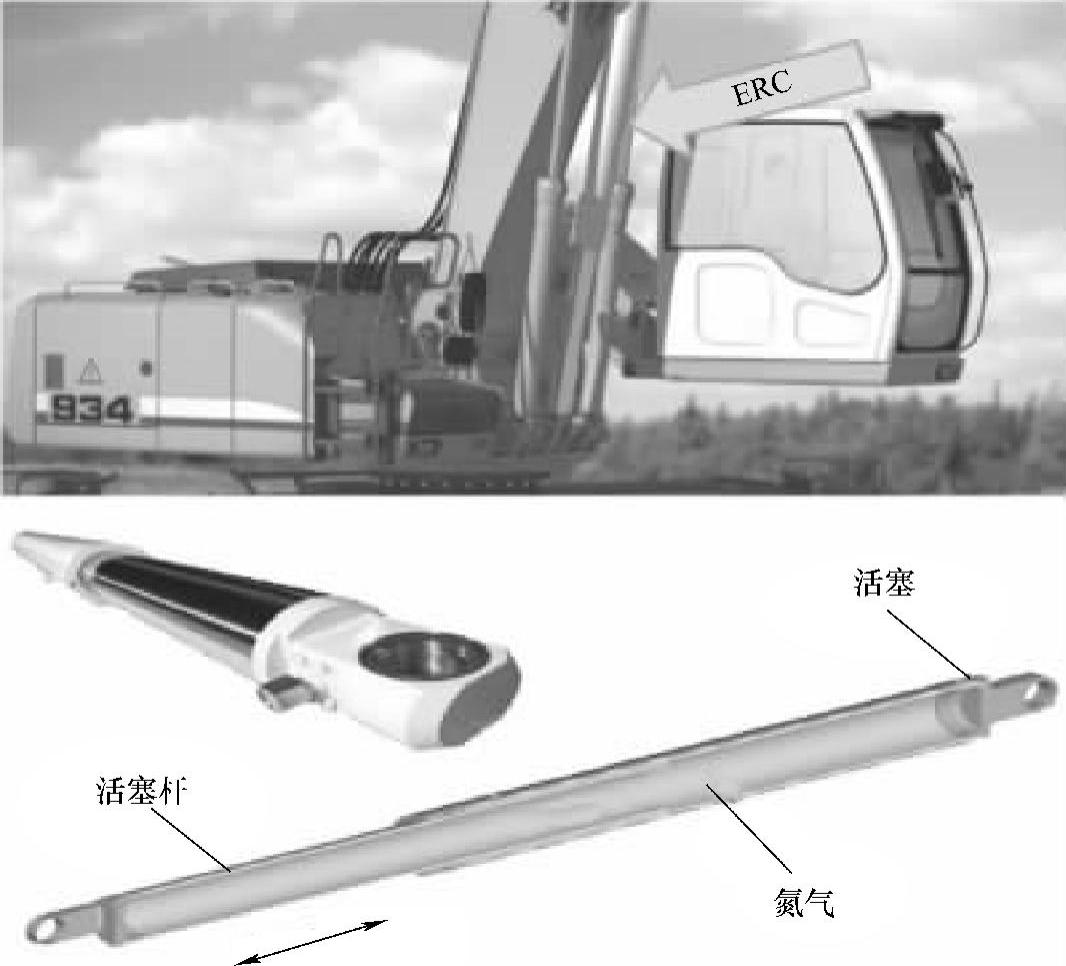
图6-41 利勃海尔的ERC原理示意图
2.特性分析
在液压挖掘机领域,将图6-40所示的方案应用于液压挖掘机时,同样也需要考虑以下两点。
1)液压挖掘机动臂具有上升、停止、下放和挖掘等多个工作模式,动臂液压缸需要双向输出力,液压缸的两腔都存在高压模式。因此当铲斗下降到地面工作在挖掘模式时,虽然操作手柄的行程和动臂下放时的行程相同,但此时传统液压挖掘机动臂液压缸的无杆腔压力较低,反而是有杆腔为高压,动臂的作用在于防止铲斗挖掘无力。因此,采用平衡单元系统中,如果动臂液压缸无杆腔和液压蓄能器相连,会抵消一部分挖掘力,但不能简单地将动臂无杆腔和液压蓄能器相连。
2)平衡重力的大小受液压蓄能器压力变化的影响。液压挖掘机在实际工作过程中,动臂的姿态不同,铲斗内的负载也不同,因此动臂驱动液压缸驱动的负载实际上也在动态波动。实际上,平衡单元的平衡能力和动态的负载力很难匹配。比如,液压蓄能器的压力太低,则通过液压蓄能器平衡的动臂重力较少,必然导致大量的重力仍然通过动臂驱动液压缸提升,因此动臂在下降过程,动臂驱动液压缸无杆腔的压力较高,仍有大量的动臂势能转换成动臂驱动液压缸无杆腔的压力能消耗在原多路阀上。因此,如何对平衡单元的平衡能力进行主动控制,进而动态平衡不同姿态时动臂的等效动力也是该方案的难点之一。
中南大学陈欠根、李百儒、宋长春等将和图6-40方案相类似的原理直接应用于液压挖掘机[24~26],并进行了装机实验研究,当平衡液压缸和液压蓄能器在作业中起作用时,液压挖掘机节油率达到20%,工作周期增加了3.4%,具有较好的操作性和节能性。长安大学张超等提出了类似利用辅助液压缸回收起重机动臂势能的系统,不同的是,该系统液压蓄能器回收的是辅助液压缸有杆腔的能量,但有杆腔的压力较低,能量回收效率有限,且没有对动臂的速度控制和能量管理进行深入研究。
国内山东常林和山河智能都推出了采用平衡思想的液压挖掘机样机(见图6-42),该机型的系统结构原理是,在动臂的下方设有能量回收液压缸,当动臂处于下降工况时,动臂势能转化成液压能储存在液压蓄能器里;当动臂上升时,液压蓄能器内的液压油进入回收液压缸底部,从而向上推动动臂。山河智能在2014年上海宝马展推出的采用多液压缸动臂能量回收的混合动力挖掘机SWE350ES,动臂能量回收效率达到90%,比同吨位的普通液压挖掘机降低油耗27%,显著改善了尾气排放,折合平均每小时节省燃油费40元,每台每年可为用户节约燃油费近20万元。
但山东常林[26~29]、山河智能研制的样机采用的思路为图6-40所示的方案,并没有考虑到动臂工作模式的多样性和平衡单元的主动控制等,同时基于商业的保密,很少有对其内部结构、关键元件的参数优化设计以及整体的控制策略等的详细报告。
3.典型应用分析
(1)结构特点和工作原理
针对传统动臂液压系统的不足和动臂下降的可回收势能,编者提出一种由驱动液压缸、平衡液压缸、液压蓄能器、电磁换向阀、比例溢流阀和比例节流阀等组成的动臂势能回收再利用一体化系统的结构方案。如图6-43所示,该方案由平衡单元、驱动单元和控制单元等组成。平衡液压缸无杆腔和液压蓄能器油口通过4个电磁换向阀相连构成能量回收回路。在动臂上升时,液压蓄能器的高压油输入平衡液压缸无杆腔,辅助驱动液压缸提升负载,降低驱动液压缸的无杆腔压力;在动臂下降时,平衡液压缸无杆腔的液压油进入液压蓄能器,回收部分势能;在铲斗挖掘时,为增加挖掘力,液压蓄能器的液压油进入平衡液压缸有杆腔,辅助斗杆和铲斗进行挖掘;当动臂再次上升时,液压蓄能器储存的液压油再次进入平衡液压缸无杆腔,实现了能量回收再利用的目标。
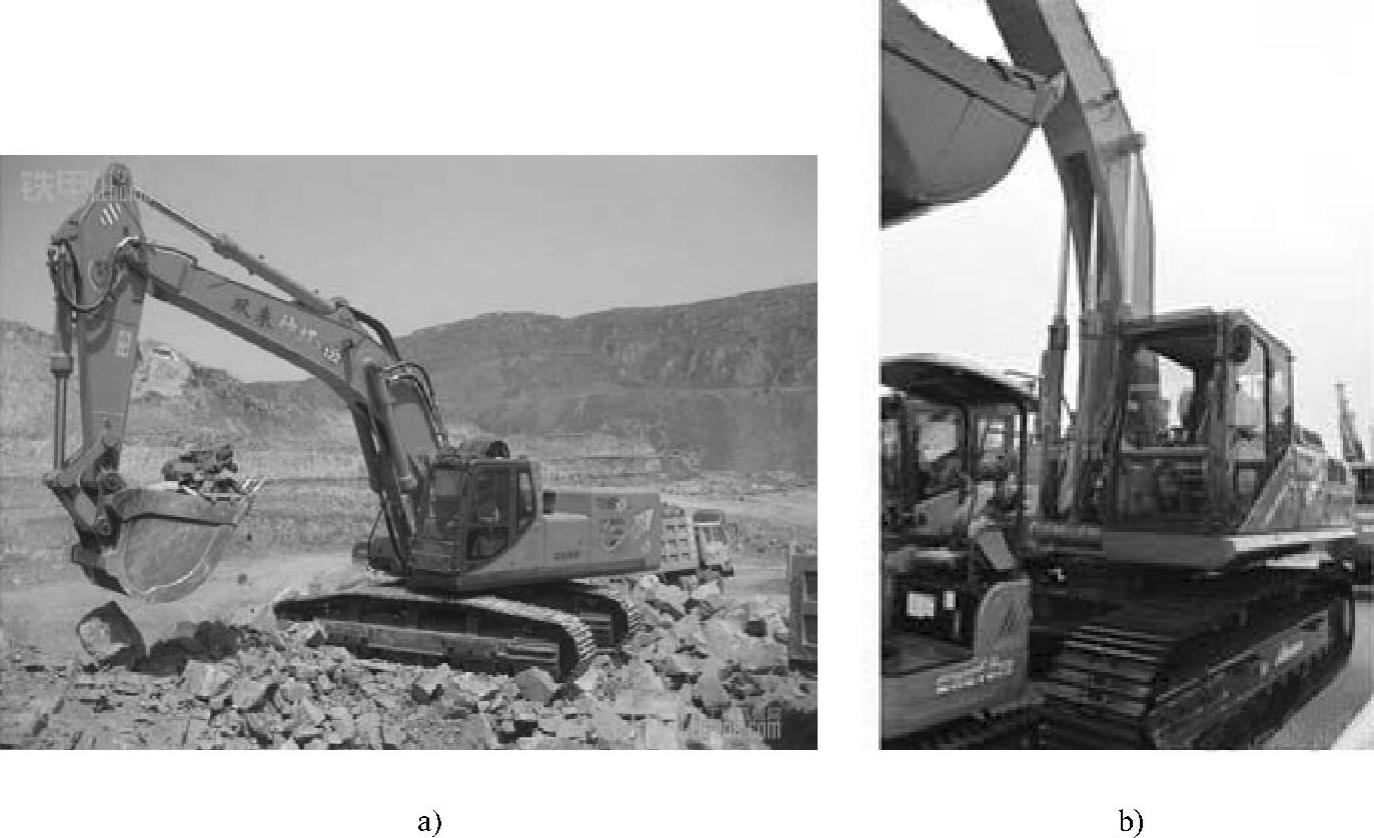
图6-42 采用平衡液压缸的样机 a)山东常林 b)山河智能
在主油路上采用比例节流阀和比例溢流阀组成动臂驱动单元。控制器主要控制电磁换向阀组的切换状态和输出比例节流阀和比例溢流阀的信号控制指令。具体工作原理如下。
1)动臂下降时,比例节流4关闭,控制器输出信号使比例节流阀3打开与目标下降速度相适应的开度,控制动臂驱动液压缸无杆腔回油流量进而控制动臂下放速度;通过基于压力反馈的PI流量控制,对比例节流阀5进行压力控制,作动臂有杆腔的背压阀,防止动臂下放过快时其有杆腔的吸空现象;平衡单元的电磁换向阀9和12得电,电磁换向阀10和11失电,动臂部分重力势能通过电磁换向阀12以液压能的形式储存在液压蓄能器中,用于下一周期提升负载时再利用,此时驱动液压缸7无杆腔压力逐渐降低,减小了回油的节流口损耗。
2)动臂上升时,通过压力传感器的压力信号使控制器输出比例节流阀3和5关闭的信号,比例节流阀4根据采集到的压力信号和流量计算公式打开与目标速度相对应的开度,比例溢流阀6失电卸荷,液压泵2输出液压油通过比例节流阀4进入驱动液压缸7的无杆腔,驱动液压缸7有杆腔的液压油通过比例溢流阀6卸荷;同时电磁换向阀12和9得电,电磁换向阀10和11失电,液压蓄能器储存的液压油通过电磁换向阀12进入平衡液压缸8的无杆腔,平衡液压缸8的有杆腔通过电磁换向阀9与油箱相通,此时为回收能量再利用模式。动臂驱动液压缸无杆腔的压力大小由液压蓄能器压力和负载压力的差值决定,平衡液压缸提供了部分动力,降低了液压泵的输出压力,达到了节能的目的。当系统检测到液压蓄能器出口压力小于设定阈值,则电磁换向阀12失电,电磁换向阀11得电,此时平衡液压缸两腔接油箱,平衡单元不参与提升负载,为普通上升模式。

图6-43 基于平衡液压缸和液压蓄能器的动臂势能回收再利用系统
1—变频电动机 2—液压泵 6—比例溢流阀 3、4、5—比例节流阀 7—驱动液压缸 8—平衡液压缸 9、10、11、12、13—电磁换向阀 14—液压蓄能器 15—溢流阀
3)动臂处于挖掘工况时,控制器输出信号使电磁换向阀10和11得电,电磁换向阀9和12失电,液压蓄能器储存的液压油通过电磁换向阀10进入平衡液压缸8的有杆腔,增加挖掘力,平衡液压缸8的无杆腔通过电磁换向阀11卸荷;同时增大比例溢流阀6的开启压力,保证液压泵处于高压小流量状态。
4)动臂下降能量回收时,为防止液压蓄能器的压力影响到动臂下降时的操控性,液压蓄能器应具有一个最高的压力判断,当控制器系统检测到液压蓄能器出口压力高于设定阈值时,控制器变换输出信号使电磁换向阀12失电,同时电磁换向阀11得电,阻断液压蓄能器与平衡液压缸8无杆腔的连接,停止能量回收。(https://www.xing528.com)
通过上述工作原理分析可知,该能量回收再利用系统具有如下特点。
1)设置控制器和采集系统,通过检测先导压差信号、动臂驱动液压缸两腔压力信号、液压蓄能器出口压力信号、液压泵出口压力信号,进行逻辑判断及算法控制,输出与目标速度相适应的控制信号,并控制电磁换向阀组的工作状态,实现能量再利用模式、能量回收模式、挖掘模式和传统模式的切换,满足了多种工况的需求。
2)液压蓄能器不仅起到了辅助动力源的作用,降低了系统能耗,同时作为系统的缓冲装置,吸收系统压力冲击。
3)在驱动液压缸和平衡液压缸无杆腔之间设置了电磁换向阀,实现液压油在两个无杆腔之间的交叉流动,使平衡单元与驱动单元进行热交换,减小平衡单元发热。
4)系统中的能量传递是重力势能与液压能的直接转换,能量转换环节少,能量利用率高,且结构简单。
(2)样机测试
图6-44所示为平衡系统液压蓄能器压力随动臂位移变化曲线,从图中可看出,15~20.5s时动臂上升,同时液压蓄能器压力由4.0MPa逐渐降低至1.5MPa,说明液压蓄能器在上一周期回收的液压油在下一周期动臂上升时释放出来辅助驱动单元提升负载;20.5~24s时动臂上升到最高点静止,此时液压蓄能器压力不变,保持在一个恒定值;24~30s动臂下降,液压蓄能器压力逐渐变大,说明液压蓄能器回收了平衡液压缸无杆腔的高压油,用于下一周期提升作业时再利用。由表6-5可以看出,能量回收单元在动臂一个工作周期内回收能量990J,相对于前面测试得到的可回收能量1700J而言,能量回收效率为58.2%。实际测得的能量回收效率比仿真得到的能量回收效率低,因为仿真是处于一个理想的环境下,而实际测试时不可避免地存在泄露等因素。由于动臂的速度是通过调节比例节流阀的输入信号来控制,因此,不可避免地有部分高压油以热能的形式损耗在节流口,大约有24%的动臂驱动液压缸无杆腔能量损耗在节流阀口。

图6-44 平衡系统液压蓄能器压力随动臂位移变化曲线
表6-5 系统能量回收效率

从图6-45所示的平衡系统与普通系统驱动液压缸无杆腔压力对比曲线可以看出,在动臂上升和下降阶段,平衡系统驱动液压缸无杆腔压力均明显比普通系统的动臂液压缸无杆腔压力低。在动臂上升阶段,平衡系统驱动液压缸无杆腔压力从2MPa逐渐增大到6.5MPa,而普通系统动臂液压缸的无杆腔压力保持在一个较大的压力值范围,约0~9.5MPa,普通系统动臂液压缸无杆腔压力与平衡系统驱动液压缸无杆腔压力之间的压差变化范围即为液压蓄能器的压力变化范围,说明液压蓄能器提供的辅助动力平衡了部分负载,将回收的能量进行二次利用。在动臂下降阶段,平衡系统驱动液压缸无杆腔压力从4MPa逐渐减小到1MPa左右,与普通系统动臂液压缸无杆腔压力之间的压差逐渐变大,变化趋势与液压蓄能器压力变化趋势相同,说明有部分重力势能以液压能的形式储存在液压蓄能器中,实现了能量回收,同时也减小了液压缸无杆腔回油在节流阀口的损耗。

图6-45 驱动液压缸无杆腔压力对比曲线
无杆腔压力的减小直接降低了液压泵输出压力,从而减小了动力系统的能量输出。由图6-46所示的液压泵出口压力对比曲线可得,在动臂上升阶段,平衡系统液压泵出口压力明显比普通系统液压泵出口压力小,且两者之间的差值约等于液压蓄能器的压力变化范围;由于动臂具有较大的惯性,因此在动臂下降阶段,两种系统的液压泵输出压力都较低,由表6-6可知,有平衡单元能量回收系统对整机的节能效果为21%。

图6-46 液压泵出口压力对比曲线
表6-6 不同系统的液压泵输出能量节能效率


图6-47 特殊工况先导操作手柄信号曲线
由于液压挖掘机负载波动剧烈,能量回收效率受负载波动影响,因此为了研究平衡单元在负载剧变工况下的能量回收效率,试验中设计了一种特殊工况,采用手柄信号的突变模拟动臂下降过程的负载大波动。手柄信号曲线如图6-47所示,在动臂下降的某个时刻,迅速将先导操作手柄扳到一个较大位置后立刻松开先导操作手柄,如此循环,直到动臂从最高点降到最低点,动臂位移曲线如图6-48所示。在此工况下,系统的能量回收时间很短,且系统受到了剧烈冲击,由于液压蓄能器具有吸收压力冲击的功能,因此,当系统受到剧烈冲击时,液压蓄能器能吸收因冲击而造成的压力脉动,同时进行能量回收。如图6-49所示,在特殊工况下,动臂完成一个下降过程,平衡单元的液压蓄能器回收了能量850J,能量回收率为50%,因此,平衡单元在特殊工况下仍具有较高的能量回收率。
当液压挖掘机的动臂液压系统增加了平衡单元进行势能回收后,动臂的工作模式决策要根据先导手柄压差信号和驱动液压缸两腔压力相结合进行复合判断。如图6-50所示,在初始时刻,先导手柄的两腔压差信号处于一个较小的区间范围内,此时动臂在最低位置静止;当先导手柄的两腔压差信号大于设定的判断阈值范围内时,动臂的位移逐渐增大,此时动臂处于上升模式;当先导手柄的两腔压差信号处于下降设定的判断阈值范围内时,动臂的工作模式有两种:分别为动臂下降势能回收模式和动臂下降挖掘模式,需要根据动臂驱动液压缸两腔压力的大小关系进一步判断区分。从图6-50中可看出,当动臂处于挖掘模式时,驱动液压缸有杆腔的压力明显高于无杆腔压力。
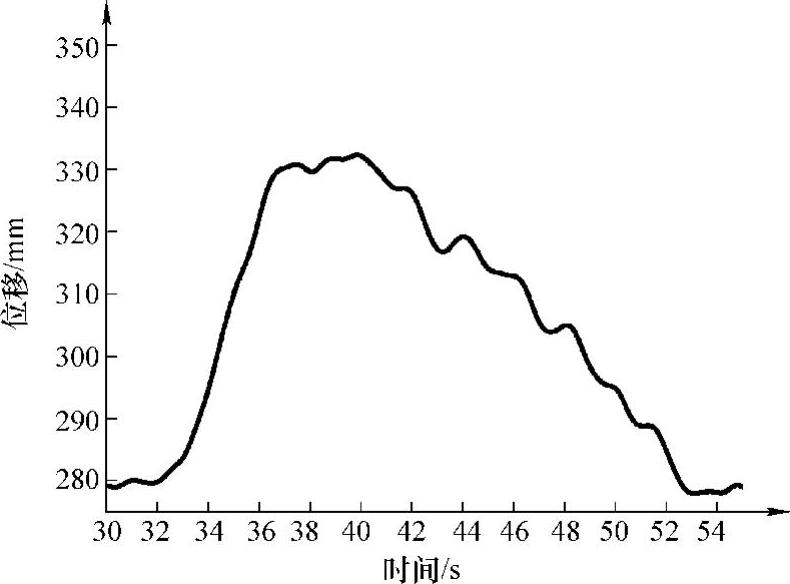
图6-48 特殊工况下的动臂位移曲线

图6-49 特殊工况下液压蓄能器的回收能量

图6-50 动臂位移与先导手柄压差跟随曲线
如图6-51所示,在时间为45s的时刻,先导操作手柄给平衡系统一个目标下降速度的变化指令。在采用平衡单元的势能回收系统中,采用基于压差的信号控制方式调节动臂下降速度,动臂速度大小跟随操作手柄的先导压差变化而变化,当先导压差逐渐增大,动臂速度也跟随逐渐增大;当先导压差逐渐减小,动臂速度也跟随逐渐减小。因此,该能量回收系统具有较好的速度跟随性能。

图6-51 平衡系统的动臂速度跟随曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。