



二次调节系统提供了新的控制规律和控制系统结构。即使是控制参数(位置、转速、转矩、功率)不同,但最终执行元件都是相同的,并且都是通过控制变量控制伺服液压缸来控制二次元件的斜盘倾角。因此,可以通过对不同参数的检测和反馈来实现多种控制功能,如位置控制、转速控制、转矩控制和功率控制等。
1.转速控制
二次调节静液传动转速控制是二次调节静液传动系统中最常用同时也是最基本的调节方式,其他各种调节方式都是在此基础上发展起来的。其工作原理如图3-48所示,在此二次调节转速控制系统中,经转速传感器测量得到的实际转速与设定转速比较得到的差值经控制器、电液伺服阀和变量液压缸调节二次元件的斜盘倾角,使输出转矩适当变化,最终控制二次元件稳定于期望转速。二次调节系统中的二次元件一般选用可逆式变量马达/泵,当液压元件从“驱动”过渡到“制动”工况时,它就由马达过渡到泵工况了。这就是说,液压元件既可以输出功率也可以吸收功率,因此实际控制中应注意由外部参量的变化判断二次元件在不同时刻的确切工作状态。
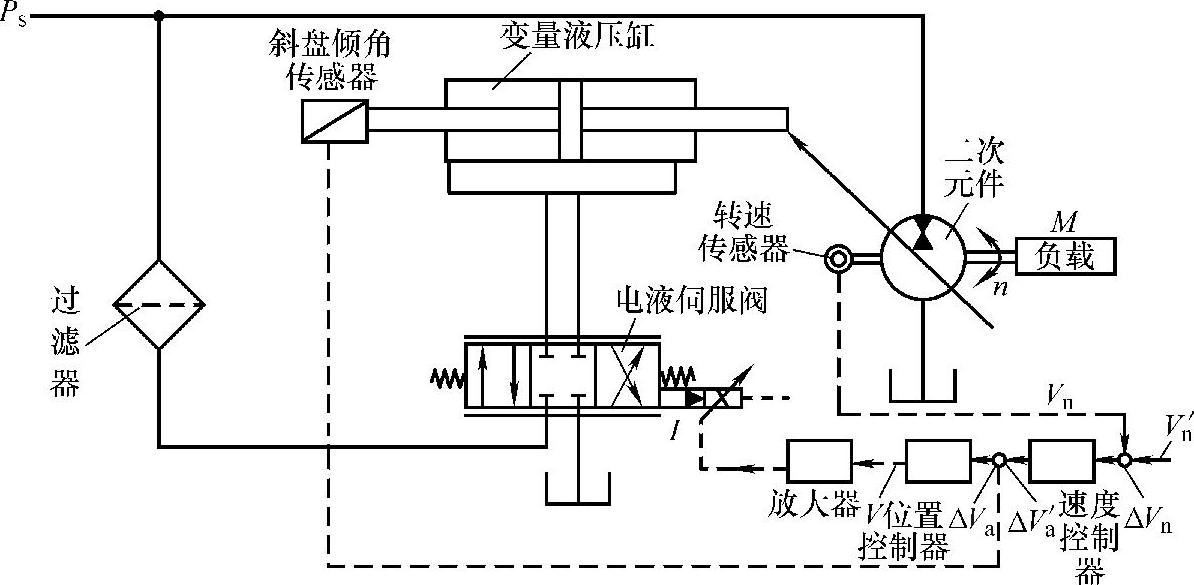
图3-48 二次调节转速控制系统原理图
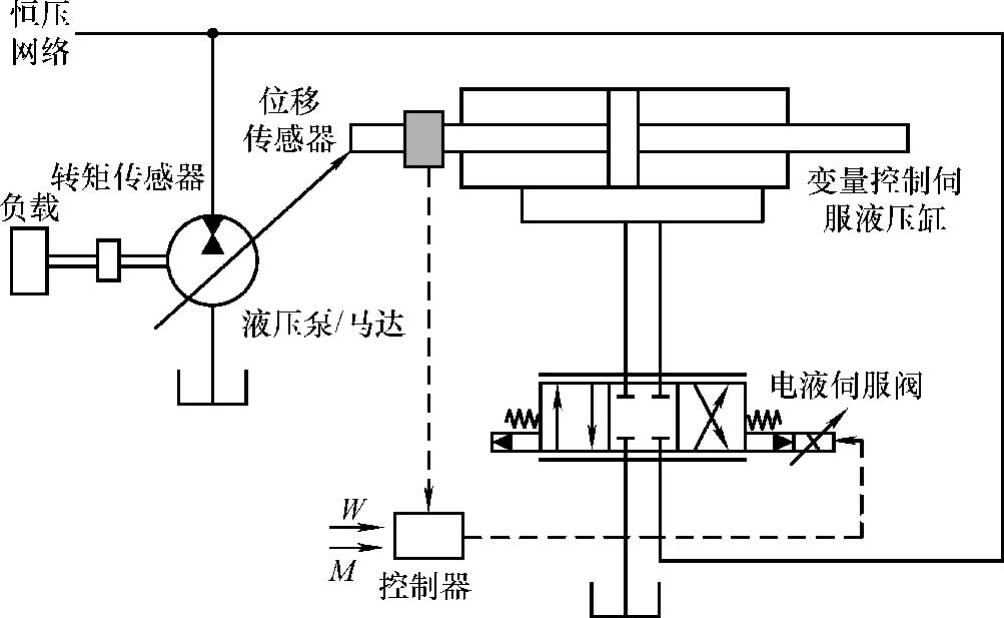
图3-49 二次调节转矩控制系统原理图
2.恒转矩控制
图3-49所示二次调节转矩控制系统为恒转矩控制系统。在此恒压网络中,控制二次元件液压泵/马达的斜盘倾角为一定值,则相应的输出转矩也为一定值,这时可采用位移传感器或转矩传感器。采用位移传感器检测变量缸的位移,如果使它为一定值,根据转矩和变量之间的相互关系,可使输出转矩也为一定值。但是由于粘性摩擦转矩的影响,对应关系为理论输出转矩,而不能精确地控制实际输出转矩。采用转矩传感器则能实现较精确的转矩控制,但转速传感器不易安装。在转矩控制调节系统中,也应实行转速检测监控,防止超速。对于像液压绞车、卷扬机之类的传统液压传动装置,需要有恒定的牵引力,如果采用二次调节静液传动系统,即为恒转矩控制。
3.恒功率控制(https://www.xing528.com)
恒功率调节是指二次元件液压泵/马达通过自身的闭环反馈来实现输入功率的恒定。在二次调节系统中,系统工作压力恒定,因此必须保证输入流量为恒值。在二次调节静液传动系统功率控制时,可以有控制压力、二次元件排量和二次元件转速的乘积为一定值以及控制转矩和转速的乘积为一定值的两种实现功率控制途径,即通过检测二次元件的输入流量并反馈到控制器,与实际给定值进行比较,用这个差值来控制二次元件的排量,使输出功率与期望值相符,如图3-50所示;或是通过检测二次元件的转速与变量控制液压缸的位移(排量),然后,用两者的乘积(流量)与实际给定值进行比较,用来调节二次元件的排量。
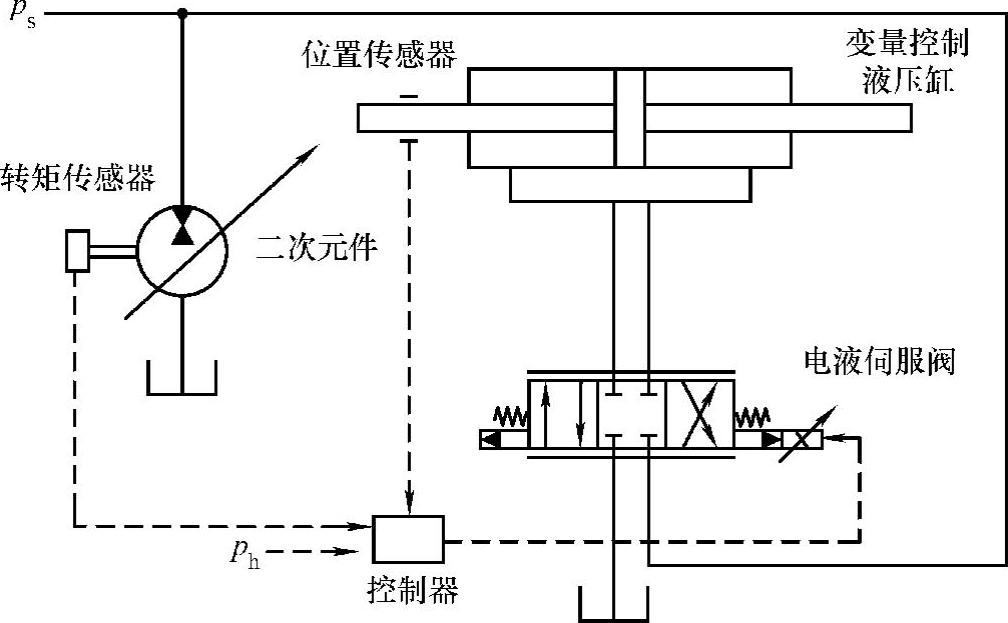
图3-50 二次调节静液传动转速测量与功率控制系统原理图
4.位置控制
在二次调节控制系统中加入了二次元件输出轴的转角反馈回路,即构成如图3-51所示的二次调节电液位置控制系统。在这个控制系统中包含有变量控制液压缸的位移反馈,此时它作为系统的辅助控制变量。
由于静摩擦转矩的影响和转动惯量的存在,惯性力的起点和大小不好确定,因此,用电液模拟控制和机液控制难以实现位置控制,必须选择恰当的控制策略。采用数字控制技术和模糊控制策略可较好地解决该问题。传感器可采用电位计或光电码盘。其中光电码盘的结构简单,测量精度高,输出量为数字量,易于计算机处理,抗干扰能力强。在转角设定值较小时,可以不限制二次元件的最大转速,超速的可能性小,系统只经历一个简单的加速和减速转动的过程,在达到设定转角时,速度为零;但在大转角时,系统有两个控制对象,这时必须限制最大转速,以免超速。这种控制方案可用于矿井提升机、载人电梯和其他传动系统中。
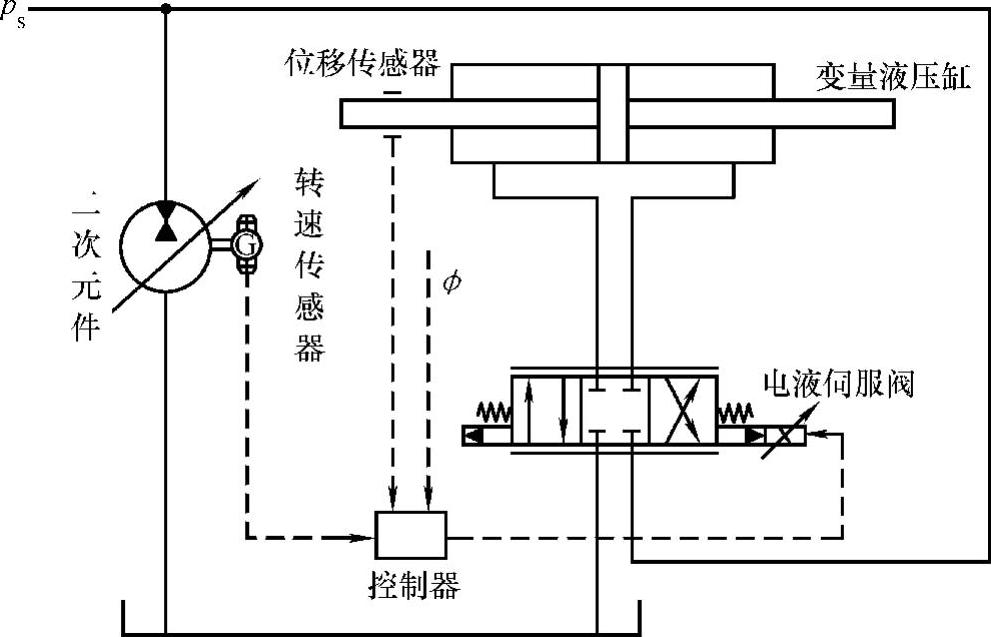
图3-51 二次调节电液位置控制系统原理图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。