



系统仿真技术是以相似原理、控制理论、计算机技术、信息技术及其应用领域的专业技术为基础,以计算机和各种物理效应设备为工具,利用系统模型对实际系统进行动态试验研究的一门综合技术。仿真技术涉及控制理论建模、计算机软件、数值方法、嵌入式系统、网络、工程设计和有关专业领域知识等方面的基础,是学科交叉发展的结果。从更一般的意义上来讲,系统仿真可以理解为是对一个已经存在或尚不存在但正在开发的系统进行系统特性研究的综合科学。对于实际系统不存在或已经存在但无法在现有系统上直接进行研究的情况,只能设法构造既能反映系统特征又能符合系统研究要求的系统模型,并在该系统模型上进行所关心的问题研究,揭示已有系统和未来系统的内在特性、运行规律、分系统之间的关系并预测未来。
依据不同的分类标准,可将系统仿真进行如下分类:①根据被研究系统的特征可分为两大类,连续系统仿真和离散事件系统仿真;②按仿真试验中所取的模型时间标尺与自然时间标尺之间的关系可将仿真分为实时仿真和非实时仿真两大类;③按照参与仿真的模型的种类不同,将系统仿真分为物理仿真、数字仿真及半物理仿真。
一般,动态仿真系统指的都是非实时仿真系统。非实时仿真系统通常用动态方程来描述,即建立系统的数学模型,采用离线方式与系统内部数据进行交互。这种传统的纯数学建模与仿真,模型中的硬件环节由数学模型所代替,往往达不到预期的理想控制效果。加上离线仿真不能对内存、接口和通信等实时参量进行评价,因而设计者必须不断地对自身的设计做出调整,开发周期相对过长。
与非实时仿真系统相对应的称为实时仿真系统。实时仿真理论与技术多年来一直是系统仿真领域的重点研究课题之一。在对系统进行仿真时,若有实物介入整个仿真系统,必须要求仿真时间标尺与实际系统时间标尺相同,这种仿真称为实时仿真。它的主要研究内容包括:系统实时建模和模型验证,实时仿真计算机,实时仿真算法,实时仿真软件,实时仿真的时间控制等等。半物理(或称硬件在回路,Hardware-in-the-loop,HIL)仿真系统是实时仿真最典型的代表。所谓半物理仿真是指在仿真实验系统的仿真回路中接入部分实物的实时仿真。它是目前仿真技术中置信度最高的仿真方法。
液压挖掘机系统是一个综合了液压、机械、控制等多方面的复杂系统,要建立其仿真模型,需要仿真软件具有上述多领域的协同仿真功能。下面本书推荐几个建立液压挖掘机模型的常用仿真软件及方法。
1.AMEsim仿真软件
AMESim软件是由法国IMAGINE公司于1995年推出的专门用于液压/机械系统建模、仿真及动力学分析的优秀软件[5]。该软件为用户提供了丰富的应用元件库,包含流体动力、车辆和信号控制等多种仿真环境,可进行系统级或元件级的仿真研究。该软件具有如下主要特点:①拥有丰富的模型库;②采用C或FORTRAN编程,元件代码底层开放,用户可自行开发或构建符合个人需求的元件;③拥有与Matlab/Simulink、Adams等软件的接口,可方便地与这些软件进行联合仿真。AMESim采用图形化的建模方式,用户可以根据实际的物理模型和系统结构从元件库中提取基本单元来建立仿真模型,不需要书写复杂的程序代码,对于一个复杂的工程系统,往往涉及多个领域,AMESim则突破性地实现了多个领域仿真,使工程人员从繁琐的数学建模中解放出来,将更多精力投入到系统的研究。
因此,选择AMESim作为液压挖掘机的仿真软件,所建立的模型如图1-13所示。模型中,机构部分的旋转体、动臂、斗杆、铲斗等由AMESim的机构库提供,由于AMESim只能进行二维的机构仿真,机构中的旋转部分与其他机构分开,其转动惯量由实测的旋转马达的数据反算得到;液压系统则由液压库所提供的元件构成,在仿真中,方向阀V1、V2、V3、V4用来控制油路的方向,而通流面积则由节流阀组01、02、03和04来控制,以实现与实际挖掘机主阀相同的阀芯位移-通流面积特性,主阀的旁路由两个等效节流口来替代,两个主泵的排量由给定的信号和反馈的主泵出口压力计算得到。
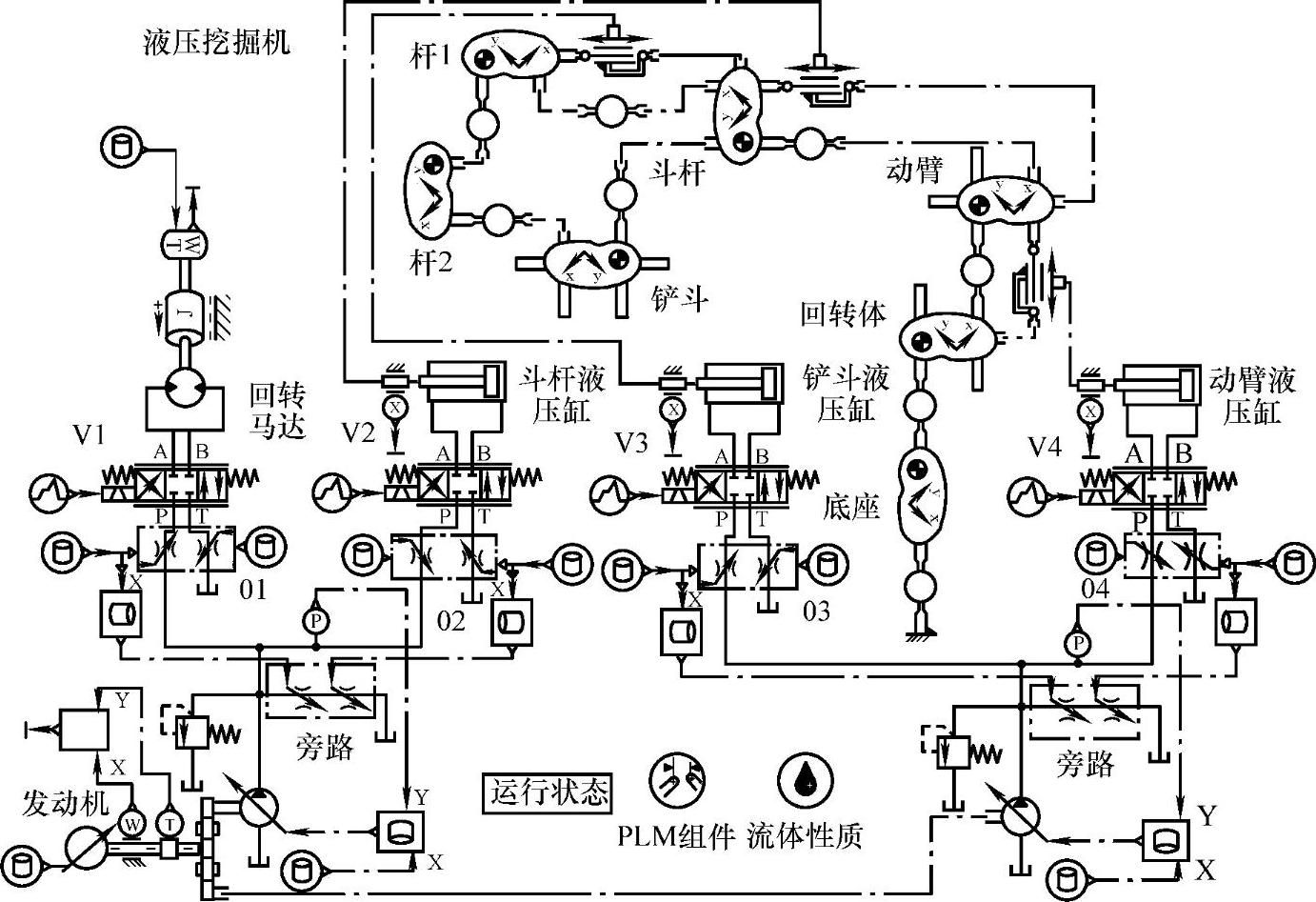
图1-13 液压挖掘机仿真模型
2.MATLAB仿真软件
MATLAB是MathWorks公司于1982年推出的一套高性能的数值计算和可视化数学软件。它集数值分析、矩阵运算、信号处理和图形显示于一体,构成了一个方便的、界面友好的用户环境。在这个环境下,对所要求解的问题,用户只需简单地列出数学表达式,其结果便以数值或图形方式显示出来。
3.Simulink仿真软件
Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。它和MAT-LAB的无缝结合使得用户可以利用MATALB的丰富资源建立仿真模型,监控仿真过程,分析仿真结果。使用Simulink可以方便地进行控制系统、DSP系统、通信系统以及其他系统的仿真分析和原型设计。但是对于工程机械中常用的机构之间的相对运动的仿真计算还只能通过对各元件进行详细的数学建模来实现,不仅建模复杂,而且计算量非常大。
在MATLAB系统12.1及其以后版本当中,引进了基于Simulink环境的SimMe- chanics工具箱,大大简化了机构之间相对运动的仿真计算,为液压挖掘机的机械执行结构和液压驱动系统之间联合工作的研究提供了方便快捷的仿真手段。
因此,以MATLAB系统作为系统的仿真工具,同样也可以作为液压挖掘机的仿真工具。(https://www.xing528.com)
4.联合仿真
(1)AMESim与MATLAB联合仿真
AMESim采用物理模型的图形化建模方式,软件中提供了丰富的应用元件库,为流体动力、机械、热流体和控制系统提供一个完善、优越的仿真环境及最灵活的解决方案,AMESim还提供了与MATLAB、ADAMS等软件的接口,可方便地与这些软件进行联合仿真。Simulink借助于MATLAB强大的数值计算能力,能够在MATLAB下建立系统框图和仿真环境,可处理包括线性、非线性系统;离散、连续及混合系统;单任务、多任务离散事件系统等,但MATLAB存在不能有效地处理代数环等缺点。因此,在AMESim中对液压伺服系统建模,在MATLAB/Simulink中采用方块图的模式对控制系统的数学模型进行建模,实现两个软件的联合仿真,既能充分利用AMESim智能求解器的优越积分功能以及齐全的分析工具,又能借助MATLAB/Simulink强大的数值处理能力,减小建模的工作量,同时用户可自行确定AMESim与MATLAB/Simulink两部分模型的仿真算法类型,从而可以由用户确定仿真计算的速度与精确程度。
(2)ADAMS和MATLAB的联合仿真
ADAMS是美国MDI公司开发的软件,它为用户提供了强大的建模、仿真环境,使用户能够对各种机械系统进行建模、仿真和分析,具有十分强大的运动学和动力学分析功能,广泛应用于世界各国的工程领域。ADAMS是一种虚拟样机分析应用软件,为用户提供了强大的建模和仿真环境,使用户能够对各种机械系统进行建模、仿真和分析,具有十分强大的静力学、运动学和动力学分析功能,广泛地应用于世界各国的工程领域;MATLAB以其强大的计算功能,计算结果和编程的可视化以及极高的编程效率,迅速成为从事科学研究和工程设计不可缺少的工具软件,而把ADAMS和MATLAB联合起来仿真,可以将机械系统仿真分析同控制计算仿真有机地连接起来,实现机电一体化的联合分析。其中,ADAMS建立联合仿真系统的机械模型并添加外部载荷及约束,MATLAB/Simulink为机械系统建立控制程序分析。ADAMS/Controls将两者连接起来,利用MATLAB/Simulink的控制输出来驱动机械模型,并将ADAMS中机械模型的位移、速度和加速度等输出参数反馈给控制模型,实现在控制系统软件环境下进行交互式仿真。
5.半物理实时仿真
半物理实时仿真技术发展到现在已经非常成熟,市场上也出现了许多优秀的实时仿真系统产品,它们一般都具有实时性好、可靠性高、开发方便等特点。使用这些实时仿真系统产品,可以方便地进行实时仿真设计和实验。
半物理实时仿真技术在国外起步比较早,发展也很迅速,产业化和市场化的程度高。就目前来讲,国外市场上出现的实时仿真系统主要有德国dSPACE公司的dSPACE实时仿真系统,美国国家仪器公司的LabVIEW实时仿真平台,加拿大Opal-RTTechnologies公司、Quanser公司和荷兰的DutchSpace公司等也都开发了自己的商业化仿真系统。
Opal-RTTechnologies公司的RT-Lab实时仿真系统是一个可扩充的分布式实时平台。RT-Lab实时仿真系统着重于让使用者可进行实时的计算机并行处理。它采用COTS技术,软硬件都支持多种工业标准;采用Host/Target结构,便于扩充;仿真处理器之间采用FireWire总线连接;仿真运行在QNX实时操作系统。软件系统能与MATLAB/Simulink、MATRIXx/SystemBuild无缝连接,具有仿真过程中在线修改参数的功能,便于逆向测试,支持大量第三方工具。产品的缺点是,针对专用设备,需要手工修改适应于RT-Lab编译的接口模块。
DutchSpace公司的EuroSim可应用于从系统建模、分析、离线仿真到实时仿真的全过程;可以对仿真系统进行模块化设计,具有较强的可重用性;采用C/S结构,便于将仿真系统扩充成分布式实时网络系统;支持MATLAB等第三方工具。但是该系统不支持仿真过程的在线修改,对硬件直接操作困难。
国内的实时仿真平台有国防科学技术大学计算机学院自主创建的YH-Astar。该平台是基于Intel平台和WindowsNT操作系统的,建模使用自主研制的仿真语言YHSim++,支持连续系统和离散事件建模仿真;支持以太网,能够支持分布式半实物实时仿真的构建,为大型复杂系统提供强有力的分布式仿真平台。同时此平台提供了一体化的建模、仿真与人机交互环境、直观的用户界面、直观的实时曲线显示和事后分析与处理能力。但由于YH-AStar建模采用自己研制的YHSIM++语言和语言编译器,用户需要学习YHSIH++语言,建模不如MATLAB直观。
还有应用于各个专业领域的仿真系统,如加拿大Quanser公司的三自由度直升机控制系统实时仿真平台,德国ETAS公司用于汽车动力传动系统应用领域的ECU开环和闭环测试的PT-LABCAR半物理仿真系统以及各类用于军事领域的包括航空航天、导弹火炮等的实时仿真系统。专业领域的仿真平台软硬件接口扩展比较困难,系统特性比较单一,不具备通用性,灵活性比较差。
此外还有不少基于实时操作系统的实时仿真系统,如面向VxWorks的半物理仿真平台,新墨西哥理工学院开发的基于标准Linux的具有硬实时特性的RTLinux仿真平台以及基于Ctask、pDOS和DigitalUNIX的实时仿真系统。但是,实时操作系统一般都具有市场占有率低、应用开发环境及支持软件缺乏、开发难度大等诸多缺点。面对PC机市场占有率高、技术发展迅速的情况,有部分研究者开始关注基于PC机的Windows操作系统的实时仿真系统,如xPC目标系统。但是Windows操作系统其本身是多任务的非实时系统,对系统的改造复杂,硬件接口的实时性也很难满足许多场合的要求。也有研究人员采用DSP等搭建专用的小型实时仿真系统。此类系统体积小、成本低,一般适合某些对实时性要求不高的专用场合,系统的可靠性和实时性较难保证。
dSPACE实时仿真系统是由德国dSPACE公司开发的一套用于控制系统开发及半物理实时仿真的工作平台。dSPACE实时系统主要包括dSPACE的硬件系统和dSPACE的软件系统。硬件系统包括核心的智能化的单板系统、处理器板、I/O板卡等;软件系统主要有ControlDesk、AutoMationDesk和MotionDesk等。
dSPACE实时仿真系统具有众多优点:系统硬件接口和软件环境基于PC机的Windows操作系统,便于用户掌握和使用;组合性强,可以根据不同用户的要求对系统进行多种组合,包括对处理器和I/O的组合,来组成不同的应用系统;系统过渡性好,易于掌握和使用;对产品型实时控制器的支持性强;快速性好,大大节省了时间和费用;性能价格比高,系统能在众多不同场合使用;保证代码本身的独立运行,实时性好;可靠性高,兼容性好,灵活性强。目前,dSPACE实时仿真系统已经广泛运用于航空航天、汽车发动机及工业控制等领域。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。