



1.主变量泵控制回路
该系统是由两台轴向变量活塞泵、先导泵及各控制阀组成的。变量泵中的伺服阀由伺服活塞和导向滑阀组成,其作用是增大或减小变量泵的输出流量。主泵的控制回路如图1-4所示,该系统变量泵采用了正流量控制、全功率控制、速度传感控制和慢速转矩增加控制等。
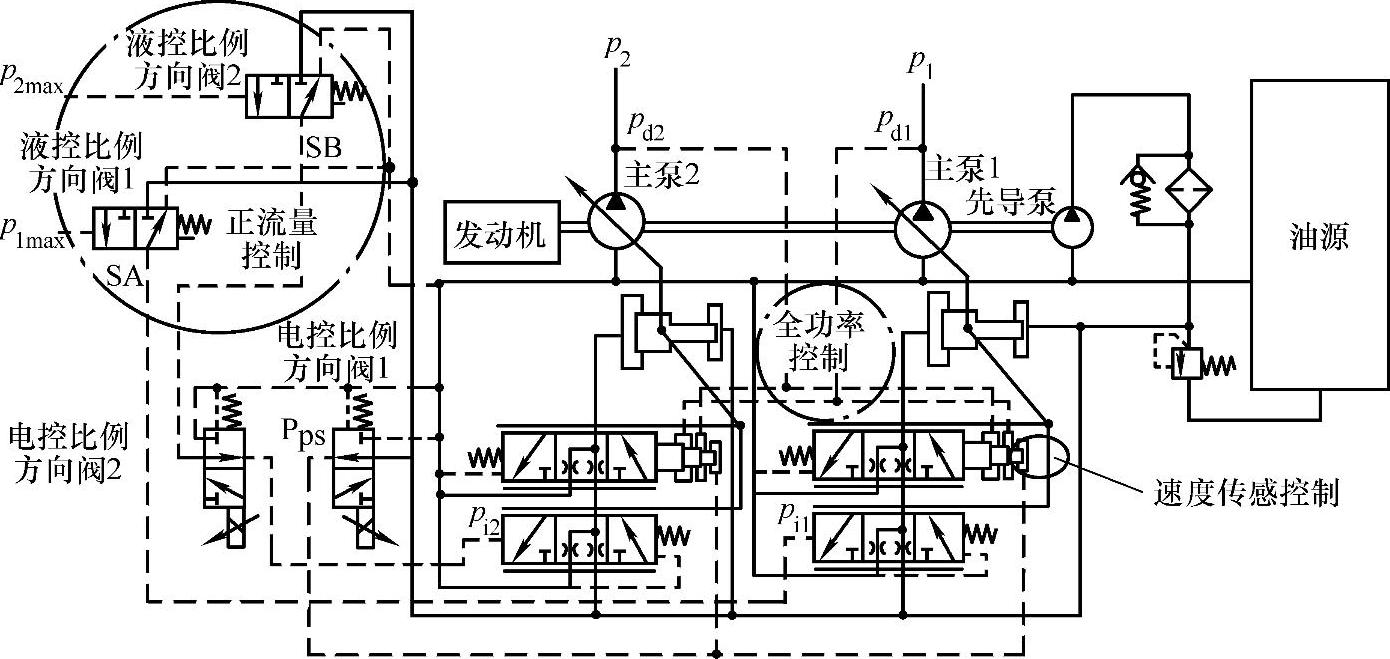
图1-4 ZAXIS200液压挖掘机主泵排量控制回路
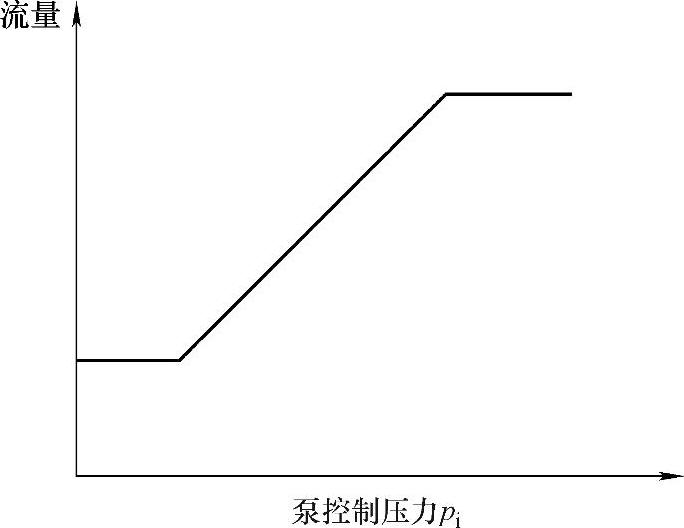
图1-5 正流量控制系统p-q示意图
(1)正流量控制
正流量控制是利用操纵手柄的先导压力对泵排量直接控制。用六通多路阀控制液压缸的速度和方向。通过梭阀组将最大先导压力选择出来,用以控制液压泵排量。主泵1由梭阀选择表征动臂提升和下降、斗杆收回和伸出、铲斗翻入和翻出以及右行走的先导操作最大压力p1max,主泵2由梭阀选择表征动臂提升、斗杆收回和伸出、左回转和右回转、附件操作以及左行走的先导操作最大压力p2max;然后被选择的压力油流向主泵1流量控制阀(液控比例方向阀1)或主泵2流量控制阀(液控比例方向阀2)移动流量控制阀阀芯;当主泵1流量控制阀或主泵2流量控制阀移动时,来自先导泵的先导压力油流向主泵1或主泵2的调节器,此时的主泵控制压力称为pi。如图1-5所示,当先导手柄操作时,泵流量控制阀根据先导操作手柄的行程调节主泵的控制压力pi;然后当调节器收到泵的控制压力pi时,调节器依照泵控制压力pi的大小调整泵的流量;当先导操作手柄操作时泵控制压力pi增加,调节器增加泵流量;当先导操作手柄返回中位时泵控制压力pi减小,使调节器减小泵的流量。
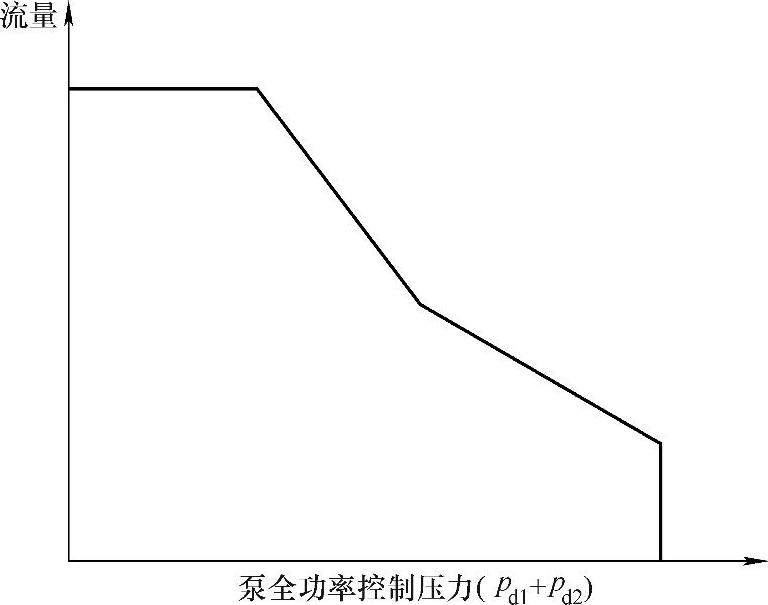
图1-6 全功率控制系统p-q示意图
(2)全功率控制
全功率控制系统中调节器以自身的泵输出压力pd1和相应的泵输出压力pd2作为控制信号压力。如图1-6所示,如果平均输出压力超过设定的p-q曲线调节器,根据超过p-q曲线的压力减小泵的流量以使泵的总输出功率回到设定的p-q曲线,避免发动机过载。p-q曲线是根据两个泵同时作业来制定的,两个泵的流量也调整得近似相等。因此尽管高压侧泵的负载比低压侧的大,但是泵的总输出与发动机的输出是一致的。
2.回转驱动控制回路
如图1-7所示,回转装置由制动阀单元、回转液压马达和回转减速装置组成。制动阀单元可以防止回转油路产生空穴和过载。回转液压马达是斜盘式轴向柱塞马达,内装回转停放制动器,由主泵输出的压力油驱动,从而使回转减速装置转动。回转减速装置利用低速大转矩使轴转动,从而使上部回转平台转动。回转减速装置为两级行星齿轮式。回转停放制动器是湿式多盘制动器。当制动释放压力进入制动活塞油腔时制动器释放(常闭式制动器),具体工作如下。

图1-7 回转驱动液压原理图(无防反转阀)
(1)制动器工作原理
1)制动器释放。回转或斗杆收回先导操作手柄操作时,先导泵内的先导压力油进入油口SH,油口SH的先导压力推开单向阀进入制动活塞腔,制动活塞上升分开固定板和摩擦板,从而使制动器释放。
2)制动器制动。当回转或者杆收回先导操作手柄松开时,油口SH的先导压力油逐渐减少,制动器释放压力通过节流孔进入回转液压马达壳体;弹簧力施加给固定板和摩擦板,这些板通过制动活塞分别与液压缸体的外径和壳体的内径啮合,利用摩擦力使液压缸体制动;同理,当发动机停止时,没有先导压力油进入油口SH,制动器自动制动。
3)制动延时。由于上车机构的惯性力,如果当回转先导操作手柄从转台回转回到中位时,立刻对转台实施制动,会产生很大的冲击载荷,可能会损坏零件。为了防止损害零件,系统设置了一个阻尼孔用于延长制动的时间,确保上车机构施加制动之前已经停止。
(2)补油阀
在回转停止期间,回转液压马达被上部回转平台的惯性力推动,液压马达的转动由惯性力推动比由主泵输出的压力油推动快,所以在油路内产生空穴。为了防止空穴,在回转油路内的压力比回油路油口C内的压力小时,单向阀打开,液压油从回油路补油以消除回转油路内的缺油状态。
3.动臂、铲斗、斗杆再生回路
该系统采用了两种再生回路:动臂(铲斗)再生回路和斗杆再生回路。
安装在动臂下降斗杆收回和铲斗翻入油路的再生阀主要用于提高液压缸的速度、防止液压缸停顿、改善挖掘机的可控制性。动臂再生阀的操作原理与铲斗再生阀相同,因此以铲斗再生阀为例加以介绍。如图1-8所示,铲斗翻入(挖掘)时,液压缸有杆腔的回油通过阀柱的A孔作用于单向阀,这时如果液压缸无杆腔的压力比有杆腔低,单向阀打开;液压缸有杆腔的回油与主泵输出的压力油一起流进无杆腔共同提高液压缸的速度;当液压缸移动到全行程位置或挖掘负荷增加时,液压缸底侧油路的压力将增加到有杆腔压力之上,使单向阀关闭停止再生作业。(https://www.xing528.com)
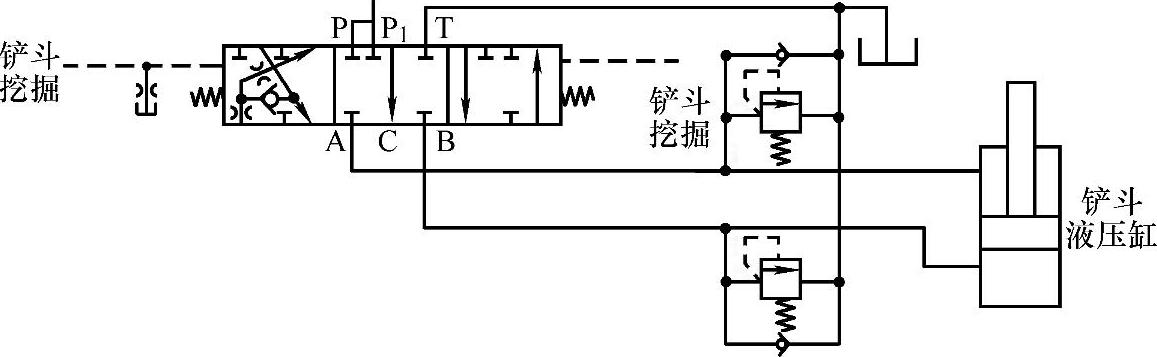
图1-8 铲斗再生回路原理图
斗杆再生阀用于提高斗杆收回速度并防止斗杆收回作业时发生停留。如图1-9所示,一般情况下,斗杆收回作业时,液压缸有杆腔的回油通过斗杆再生阀阀柱的节流孔流回液压油箱;当主泵2输油压力传感器低压(负荷较低时)、斗杆收回压力传感器高输出(斗杆先导操作手柄行程大)、回转或动臂提升压力传感器输出信号时,来自电磁阀单元SC的先导压力油推动斗杆再生阀阀柱堵住液压缸有杆腔的回油油路,从而液压缸杆侧的回油与泵输出的压力油一起流进液压缸底侧共同提高液压缸的速度。
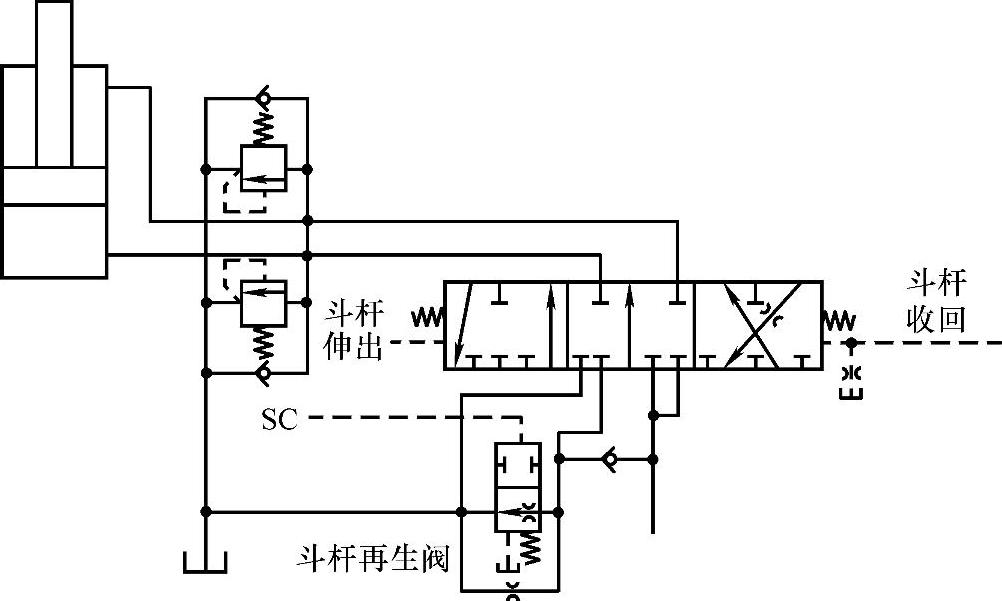
图1-9 斗杆再生回路原理图
4.抗漂移油路
抗漂移阀安装在动臂液压缸底侧和斗杆液压缸杆侧油路上防止液压缸漂移。动臂抗漂移阀的操作原理与斗杆抗漂移阀相同,因此以动臂抗漂移阀为例加以介绍。如图1-10所示,先导操作手柄在中位时,表征动臂下降的先导压力为零,抗漂移阀内的开关阀不能移动,因此动臂无杆腔的压力油通过开关阀施加到抗漂移阀内的单向阀弹簧侧(这里的抗漂移阀不能简单地认为是液控单向阀,图上的抗漂移阀上的控制油口是和单向阀的弹簧腔相通),因此单向阀关闭使动臂液压缸的回油堵塞减小液压缸的漂移。动臂下降时,来自先导阀的先导压力油推动抗漂移阀的柱塞使开关阀移动,然后单向阀弹簧腔内的油通过开关阀流回液压油箱,因此单向阀打开使回油从动臂液压缸底侧流到动臂阀柱后回油箱。
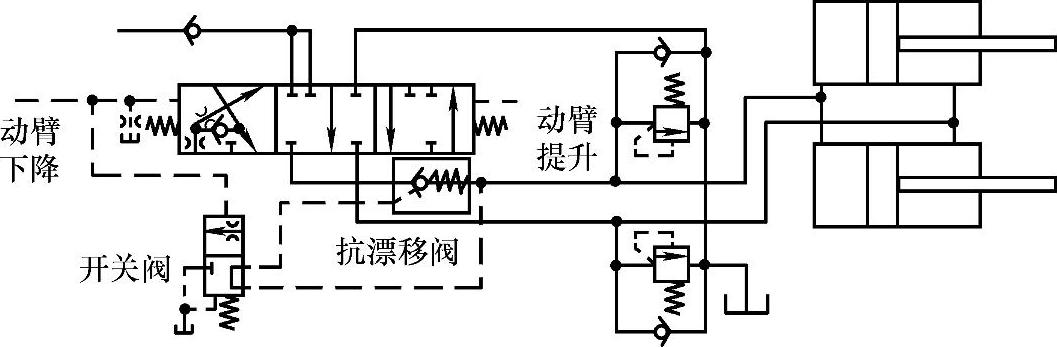
图1-10 动臂抗漂移油路原理图
5.流量控制油路
流量控制阀安装在斗杆、铲斗和辅助油路上,其作用是在进行复合作业时限制该油路的流量,使其他执行元件优先动作。以回转和斗杆收回复合作业时为例说明流量控制油路的功能,如图1-11所示。主要功能限制斗杆液压缸的流量,进而保证主泵2的压力油优先流入回转液压马达以确保回转力。
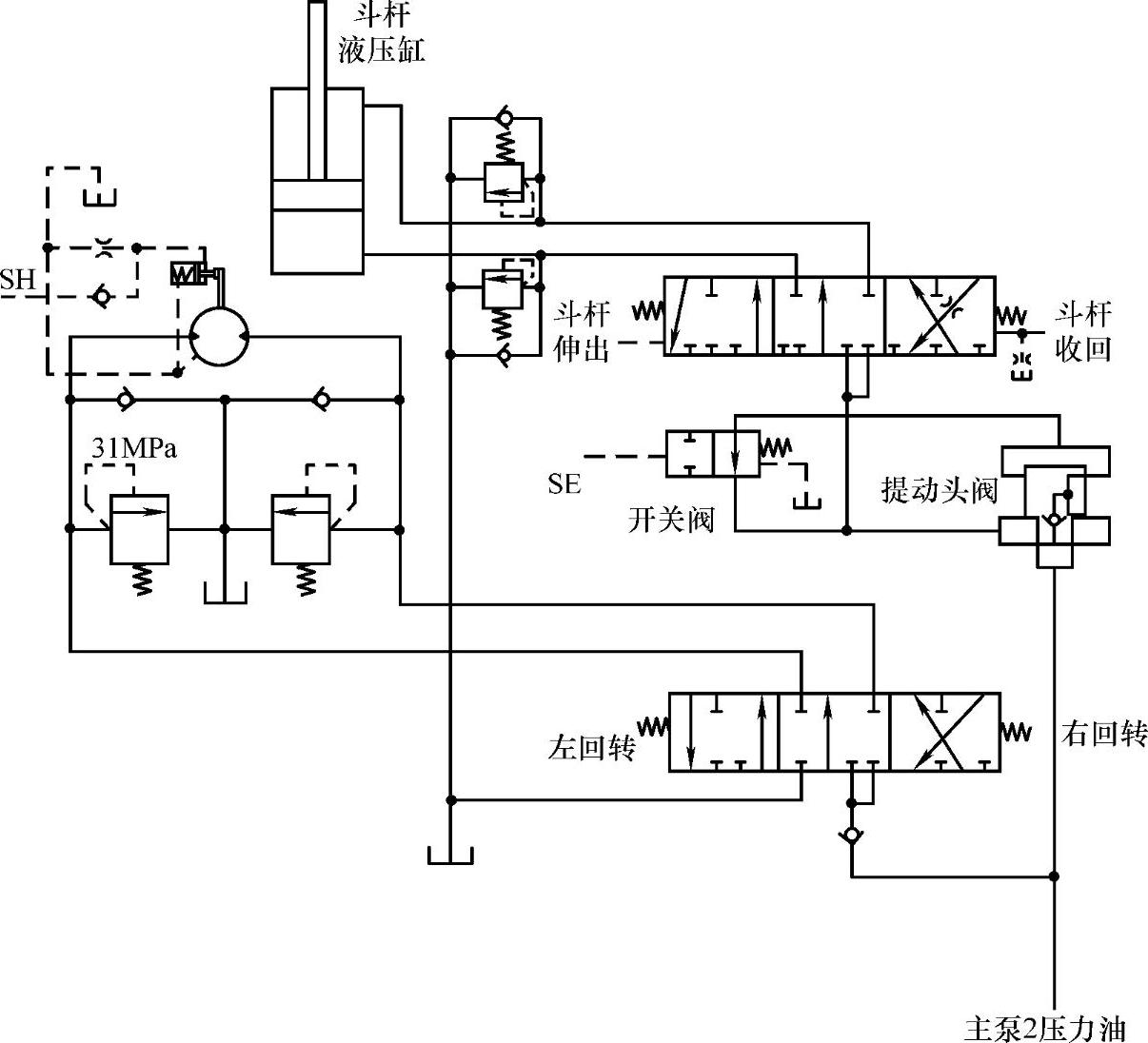
图1-11 回转相对斗杆优先原理
(1)正常作业
来自主泵2的压力油施加于提动头阀内的单向阀,正常情况下开关阀处于打开状态,然后来自主泵2的压力油打开单向阀经开关阀流到斗杆多路阀的主阀芯,因此提动头阀打开,使来自主泵2的压力油流非常顺畅的流到斗杆多路阀主阀芯。
(2)流量控制作业
来自电磁阀单元SE的先导压力油推动斗杆流量控制阀内的开关阀,当开关阀被关闭时压力油被封闭在提动头阀之后限制提动头阀打开,因而提动头阀限制流向斗杆多路阀的主阀芯的流量,使压力油优先供给比斗杆负荷更大的回转液压马达,即为回转相对斗杆优先。
6.行走驱动油路
如图1-12所示,行走装置由行走液压马达、行走减速装置和行走制动阀组成。行走马达是斜盘式变量轴向柱塞马达,装有停放制动器。行走液压马达被泵的压力油驱动,把旋转力传递给行走减速装置。行走减速装置是三级行星齿轮式,它把从行走马达传来的旋转力转换成低速大转矩动力带动驱动轮和履带转动。行走制动阀防止行走油路过载和防止出现空穴。
该系统具有慢速方式和快速方式两种方式。高速低转矩时,双速液压马达调节阀根据行走速度控制阀的作用,使调节活塞推动斜盘至最小角度,行走液压马达排量最小,系统处于高速状态。低速大转矩时,SI行走高低速控制阀不起作用,此时系统处于低速状态。
行走系统中的驻车制动器采用的是湿式多盘制动。在行走先导操作手柄处于中位时,行走制动阀内的平衡阀柱返回中位,然后作用在制动活塞上的压力油通过节流孔回到泄漏油路,因此制动活塞被碟形弹簧慢慢地向后推,结果弹簧力通过制动活塞施加给予液压缸体啮合的固定板和与壳体啮合的摩擦板,液压缸缸体利用摩擦板和制动板之间的摩擦力制动;起步行走时,来自主泵的压力油经控制阀流进油口AM或BM,压力油推动平衡阀阀柱并通过阀柱上的油道作用于制动活塞,然后制动活塞被推向碟形弹簧使固定板和摩擦板互相脱开,制动器释放。
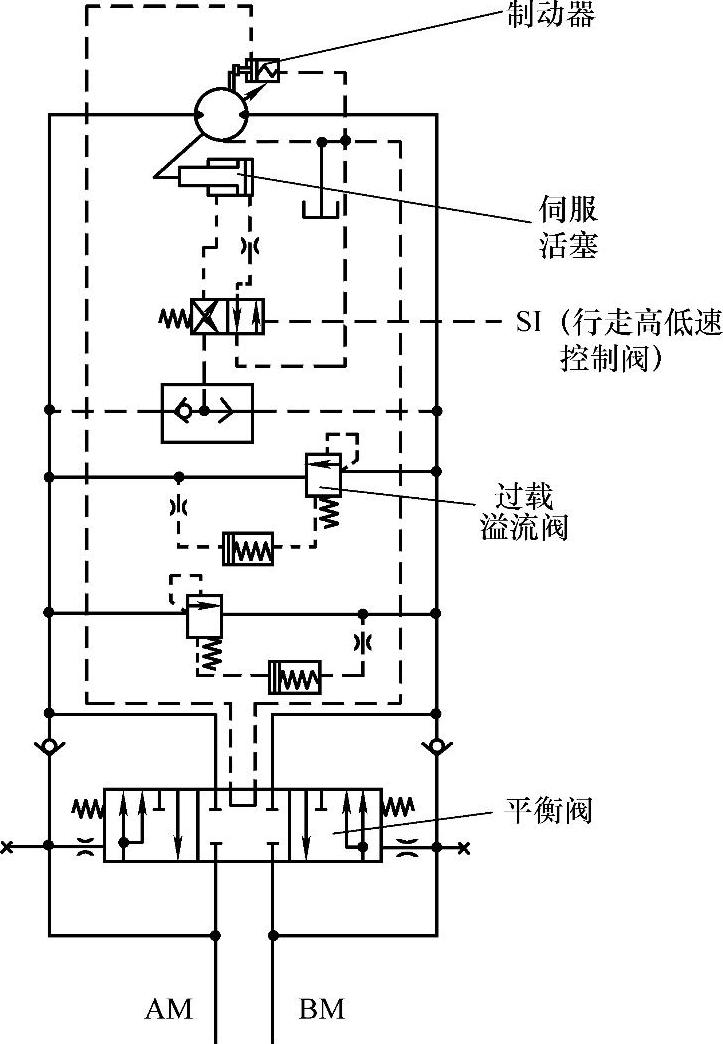
图1-12 液压挖掘机行走驱动油路原理图
平衡阀的作用是,使行走平稳起动和停止、防止下坡时失控,使行走液压马达高压油口AM或BM的压力油流进停放制动器。安全阀的作用是在马达出油口油路被关闭或节流时,压力急剧增高,促使安全阀卸压以保证系统安全。阻尼孔的作用是平稳的改变行走方式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。