



由6.2.1节的分析可知,由于定速风电机组的控制手段有限,故障下其特性并不能满足低电压穿越导则的所有要求。在低电压穿越的第一阶段(见图6-1所示的0~t1时间段),由于定速风电机组的瞬时过电流和过电压能力较强,可以保证风电机组不脱网运行,无需额外的硬件设备和控制措施;第二阶段(见图6-1所示的t1~t3时间段)和第三阶段(见图6-1所示的t3~t4时间段),为保证不脱网运行,必须限制风电机组转速低于临界转速,一方面避免风电机组因飞车而切机,另一方面保证故障恢复后风电机组的稳定运行;此外,由于低电压期间发电机会吸收大量无功电流,为满足并网导则对无功电流支撑的要求,在后两个阶段,需要增加额外的无功补偿装置,如静止无功补偿器(Static Var Compensator,SVC)、静态同步补偿器(Static Synchronous Compensator,STATCOM)等,以满足并网导则的相关要求,关于无功补偿装置及其控制的相关内容将在本书第7章中进行介绍。本节主要介绍在低电压穿越过程中限制定速风电机组转速,以保证其不脱网运行的几种方法。
1.变桨距控制
由图6-3分析可知,故障期间若能人为降低风力机的机械转矩,则可以抑制故障过程中发电机的加速,并可有效增加风电机组的临界转速值,从而提高发电机的动态稳定裕度。在采用变桨距结构的定速风电机组中,电网故障时,通过控制风力机桨距角可有效降低风力机的机械转矩,提高风电机组的不脱网运行能力。由第3章的相关知识可知,对于变桨距风电机组,当风速较低时,其桨距角一般保持为最优值(0°左右),以提高机组的风能利用效率;风速较高时,需要控制风力机桨距角,限制其转速和输出功率,以保证风电机组安全运行。通常,桨距角控制器并不检测风速,其输入量为风力机转速,当转速超过设定值时,控制器开始动作。可以想象,对于由电网故障所引起的风力机转速增加,上述控制器同样有抑制作用。因而,与定桨距风电机组相比,变桨距风电机组的低电压穿越能力更强[8]。
针对6.2.1节中的三相短路故障,对于变桨距定速风电机组,且桨距角控制采用图3-5所示方法时,系统的仿真结果如图6-8所示。仿真中,变桨距控制的转速给定值设为1.01pu,故障发生后,当发电机转速超过1.01pu时,变桨距控制器控制桨距角增加,风力机机械转矩随之降低,有效抑制发电机转速的增加。故障切除后,发电机开始减速,桨距角也逐渐减小,随着发电机转速的降低,系统吸收的无功功率逐渐减少,定子电压也逐渐恢复至额定水平,最终系统恢复至故障前的正常运行状态。可见,故障发生后,通过调节桨距角可以有效降低风力机的机械转矩,提高系统的动态稳定性,有利于保证故障恢复后风电机组的稳定运行。
变桨距方法的优点是不需要增加任何硬件电路,具有较好的经济性。然而,桨距角的响应速度受风力机叶片惯性的限制,一般较慢,因而该方法的控制能力有限。通常该方法需要与无功补偿装置配合使用,以进一步增强机组的低电压穿越能力[8-10]。
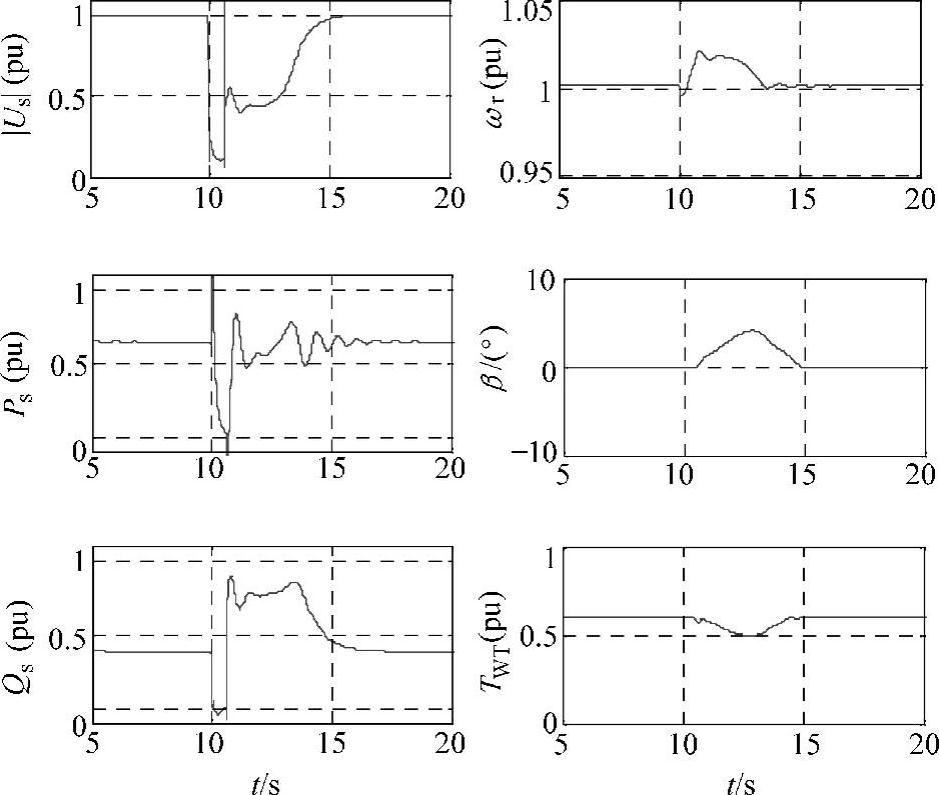
图6-8 三相短路故障下采用传统变桨距控制时定速风电机组的动态响应
2.定子侧加装串联动态制动电阻(Serial Dynamical Braking Resistor,SDBR)装置
由图6-3分析可知,故障期间若能人为提高发电机定子端电压,则可增加发电机的电磁转矩,也可抑制风力机加速。通过在风电机组定子侧安装SDBR装置,故障期间利用SDBR装置上的压降,可以提高风电机组的端电压,有助于提高机组的低电压穿越能力。
定子侧加装SDBR装置后,风电机组的系统结构如图6-9所示。如图中点画线框内所示,SDBR装置由制动电阻、旁路开关和控制器组成。旁路开关可采用机械断路器进行断续控制,也可采用电力电子开关器件进行连续平滑控制。SDBR装置既可以集中安装在整个风电场的出口处,也可以分散安装在每台风电机组的定子端,安装位置取决于系统成本及可行的安装位置[11]。
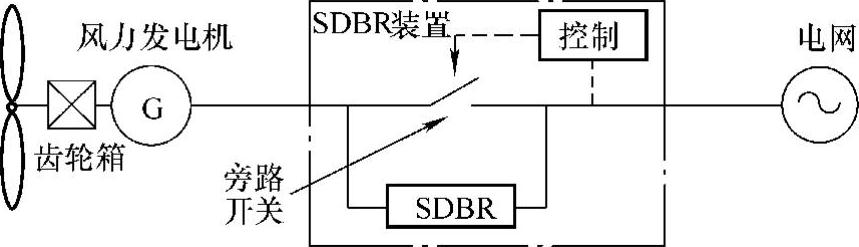
图6-9 定速风电机组定子侧安装SDBR装置结构
正常运行时,SDBR装置开关闭合将制动电阻旁路;当电网发生故障时,旁路开关断开将制动电阻串入发电机的定子侧,较大的短路电流在制动电阻上会产生较大压降,从而提高了发电机定子端电压。定子电压空间矢量可以表示为

式中,us表示发电机定子端电压矢量;ug表示电网电压矢量;RSDBR为SDBR阻值,对应的矢量图如图6-10所示[12]。由余弦定理可知

式中,θs为定子电流矢量与电网电压矢量之间的夹角。由图6-10和式(6-4)可得,故障期间SDBR上的压降可以帮助提高风电机组定子端电压,且功率因数越高,定子端电压的提升效果越明显。同时,易知SDBR的阻值越大,电阻上产生的压降越大,其电压提升效果越明显。不同阻值的SDBR条件下,异步发电机的功率-角速度特性曲线示意图如图6-11所示。可见,SDBR阻值增大可以提高故障期间风电机组输出的有功功率,从而有助于抑制风电机组的加速。然而,若SDBR阻值取值过大,SDBR的投切会引起电网电压振荡,严重时风电机组甚至会失稳[13]。实际应用中,需要综合考虑风电机组的低电压穿越能力、电网电压稳定性和系统能耗方面的要求,才能确定SDBR阻值的大小。
增加SDBR前后,三相对称故障下定速风电机组的典型动态响应如图6-12所示[11]。t=0s时发生电压跌落故障,电磁转矩随之急剧减小,风电机组开始加速。若采用SDBR装置且在0.1s时将其投入,相比于无SDBR装置的情况,发电机定子电压和输出有功功率明显增加,转速增加较慢。当t=0.3s切除故障时,若采用SDBR装置,发电机定子电压快速恢复至正常值附近,有功功率迅速增加,转速开始降低,t=1.1s时,SDBR装置退出,机组随后很快恢复稳定运行;若无SDBR装置,故障切除后,发电机定子电压和有功功率仍较小,转速持续增加,出现动态失稳。可见,增加SDBR装置可以提高定速风电机组的动态稳定性,增强其低电压穿越能力。(https://www.xing528.com)
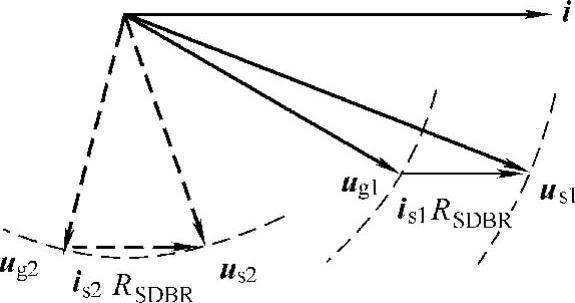
图6-10 SDBR对发电机定子端 电压的影响
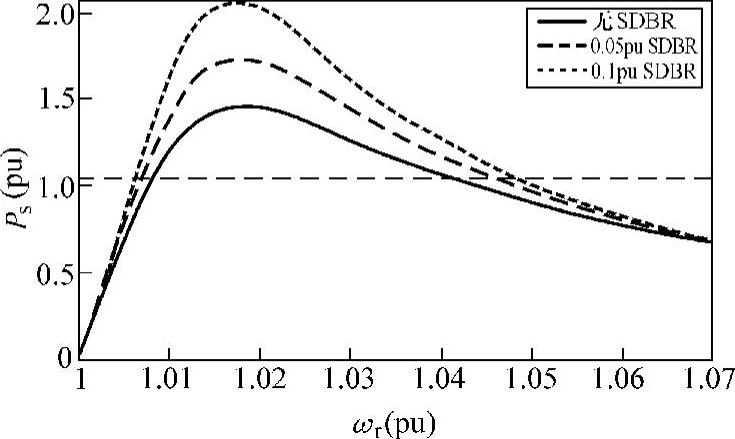
图6-11 不同阻值的SDBR下异步发 电机功率-角速度特性
由以上分析可知,采用定子侧安装SDBR装置的方法可以提高定速风电机组的低压穿越能力,但该方法需要额外硬件投入,因而会增加系统成本;此外,在电网功率因数较低的情况下,该方法的电压提升效果较差,且该方法不能辅助风电机组输出无功功率,以支撑电网。因此,上述方法可以与无功补偿装置配合使用,一方面,无功补偿装置可以提高电网的功率因数,增强SDBR装置的使用效果;另一方面,SDBR装置的使用也可降低无功补偿装置容量,两者相得益彰[14]。
尽管上述方法可解决故障后发电机组的飞车问题,但并不能抑制不对称故障下发电机的电磁转矩脉动,为避免转矩脉动引起的切机,需要在风电场并网点安装STATCOM、DVR(动态电压恢复器)等装置,通过此类装置的控制降低电网电压或风电机组机端电压的负序分量,从而减小发电机的转矩脉动,此类方法将在本书第7章中进行详细介绍。
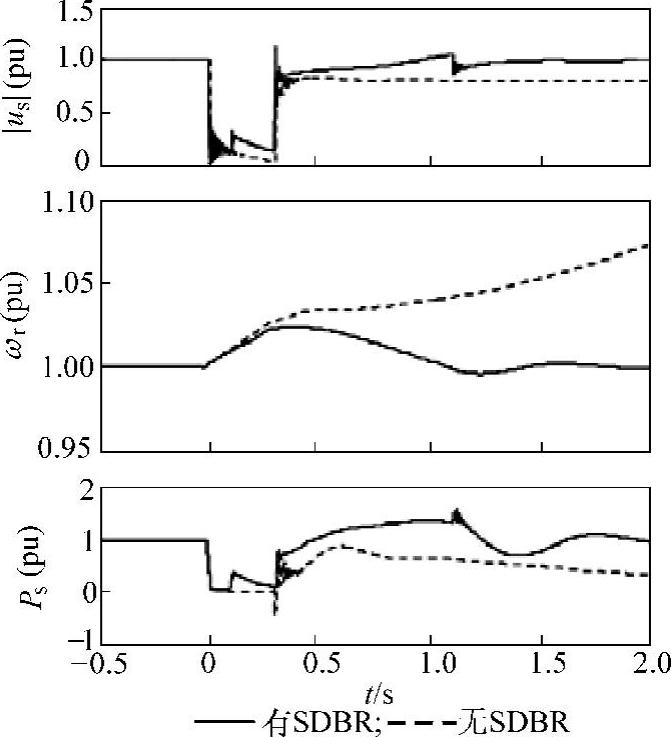
图6-12 增加SDBR后定速风电机组的低电压穿越动态响应
3.定子侧串联辅助穿越变流器
采用SDBR装置可减小发电机机端电压的跌落程度,但不能避免其跌落,在发电机定子侧串联背靠背变流器,故障期间可利用变流器将发电机与电网故障隔离,使发电机感受不到电压跌落而穿越故障区间。
定子侧串联辅助穿越变流器的低电压辅助穿越装置拓扑如图6-13所示,一般分散安装于每台风电机组的定子端[15]。如图中虚线框内所示,该辅助穿越装置由旁路开关、背靠背辅助穿越变流器和定子撬棒(定子撬棒由双向晶闸管串联卸荷电阻构成,也可用整流桥加直流斩波电路代替)组成。旁路开关可采用机械断路器进行断续控制,也可采用电力电子开关器件进行连续平滑控制。电网正常时,旁路开关导通,将变流器旁路,定速风电机组直接并网运行;当检测到电网发生故障时,旁路开关迅速关断,将变流器串联在发电机与电网之间,机侧变流器输出与故障前发电机机端电压相同的电压,以保证发电机的正常运行;网侧变流器根据并网导则的要求向电网注入无功电流。故障期间,发电机输出的有功功率通过定子撬棒泄放。故障期间,转子侧变流器只需向发电机提供励磁电流,其容量较小;定子侧变流器需输出电网需求的无功电流,容量较大。与其他方案相比,该方案的装置成本较高,但优势也很明显,它可使得定速风电机组完全满足并网导则的相关要求。目前,南京高传机电自动控制设备有限公司、金风科技股份有限公司等都已开发并量产了基于该技术的低电压辅助穿越装置。
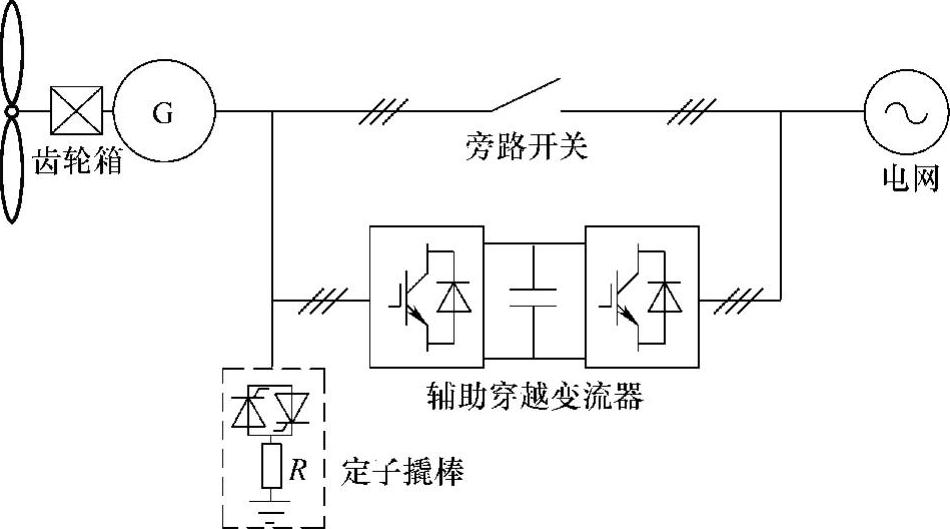
图6-13 低电压辅助穿越装置拓扑
采用串联辅助穿越变流器后,三相对称故障下定速风电机组的机端和电网a相电压的仿真波形如图6-14所示[15]。t=1.5s时,发生三相电压跌落故障,电压跌落深度为80%,故障后,电网电压降低,辅助穿越变流器迅速投入运行,发电机机端电压在二分之一工频周期内恢复为故障前的稳态值,发电机所受冲击较小。
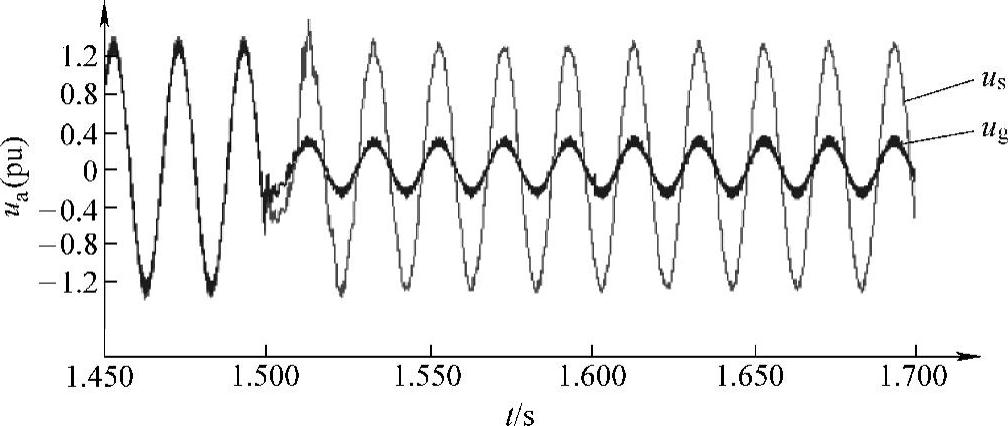
图6-14 三相故障且电网电压80%跌落时的发电机机端和电网电压波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。