



锁相环的实现方法很多,可由硬件实现,也可由软件实现[11];可采用开环结构,也可采用闭环结构;可基于频域实现,也可基于时域实现。开环锁相环实现简单、成本低,但抗扰性较差,在电网电压有谐波等条件下,其性能较差;与之相比,闭环锁相环对电压扰动的鲁棒性强、检测准确度高,应用更为广泛。对于闭环锁相环,无论采用何种方法实现,其基本结构相似,包括三个组成部分:鉴相器(Phase Detector,PD)、环路滤波器(Loop Filter,LF)和压控振荡器(Voltage Controlled Oscillator,VCO),其结构如图5-11所示[12]。
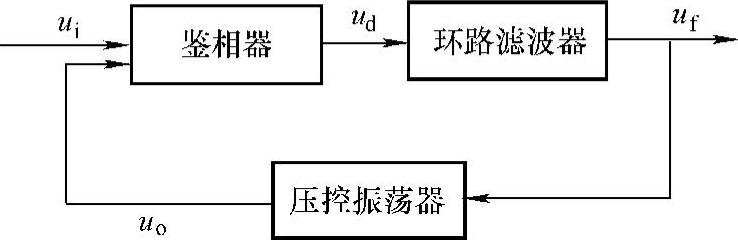
图5-11 锁相环的基本结构
PD模块的输入为被测电压信号和VCO的输出信号,PD检测两者的差值,并通过放大器将该误差信号放大后输出信号ud,ud经LF滤波后输出检测结果uf,uf作为VCO的输入,不断调整其振荡输出,形成闭环系统。当系统进入稳态时,输出uf完全跟踪输入,锁相过程结束。
5.2.1.1 硬件锁相环
早期的锁相环都是基于硬件实现的,图5-11所示的三个部分由分立元件和模拟电路构成;随着集成电路的快速发展,硬件锁相环现已实现全数字化和集成化,如德州仪器(Texas Instruments,TI)公司生产的74LS297芯片[13],其PD、VCO和LF都采用全数字电路实现,可实现电网电压的快速检测,目前已被广泛应用于电力系统的监测和保护之中。随着可编程数字芯片技术的发展,通过改进图5-11所示三部分的硬件电路,可实现更高性能的锁相环,如参考文献[11]所述的即是基于现场可编程门阵列(FPGA)实现了一种锁相速度更快、范围更广、准确度更高的全数字锁相环。硬件锁相环的优点是成本较低、性能可靠、结构和运算都比较简单,非常适用于低成本、可靠性要求高的应用场合;其缺点在于仅适用于单相系统的锁相,无法用于检测三相系统的正负序电压分量。当然,上述观点并非绝对,结合电压瞬时值检测和简单的计算模块,硬件锁相环也可扩展到三相系统的正负序电压检测中[11],然而这是以增加复杂度和成本为代价的。硬件锁相环不作为本书的重点,有兴趣的读者可进一步参阅参考文献[11]。
5.2.1.2 软件锁相环
软件锁相环在三相系统中使用较广泛,其实现前提是实时检测三相电压信号,且需要大量复杂的数值计算。在新能源并网发电系统的应用中,为控制变流器以实现系统的功率调节和保护,通常需要实时检测电网电压和系统输出电流,且会配备具有强大计算能力的微处理器,如数字信号处理器(Digital Signal Processor,DSP)。基于已有的硬件条件,软件锁相环可被容易地嵌入到系统的控制软件中,因而在该领域得到了广泛应用。
软件锁相环的基本结构也可由图5-11表示,然而与硬件锁相环不同,软件锁相环中的PD和VCO通常合二为一,很难将它们区分开来,用不同方法实现的软件锁相环主要在PD和LF两个部分有所区别。
对于三相软件锁相环,其PD可基于旋转或静止坐标系构建;根据频率响应的不同,其LF有低通、陷波、延时、二阶自适应滤波器等多种形式。根据PD和LF的不同组合,可以得到不同结构和特性的软件锁相环,见表5-1。
表5-1 不同结构的三相软件锁相环

(续)

注:LPF(Low Pass Filter):低通滤波器;DSCF(Delayed Signal Cancellation Filter):延时滤波器;SOAF(Second Order Adaptive Filter):二阶自适应滤波器;DDSRF(Decoupled Double Synchronous Reference Frame):解耦双旋转坐标系;IPTF(Inverse Park Transformation Frame):反Park变换坐标系;DSOAF(Double Second Order Adaptive Filter):双二阶自适应滤波器;FRF(Fixed Reference Frame):静止坐标系;SSI(Sinusoidal Signal Integrators):正弦积分器。
1.参考坐标系变换
对于三相系统,参考坐标系理论不仅可简化系统分析,还有利于相关控制策略的计算机仿真和数字化实现。在众多参考坐标系中,三相静止坐标系(即abc坐标系)、两相静止坐标系(αβ坐标系)和旋转坐标系(dq坐标系)得到了最为广泛的应用[20]。
对于三相对称系统,以电压变量为例,在abc静止坐标系下,三相电压变量可表示为
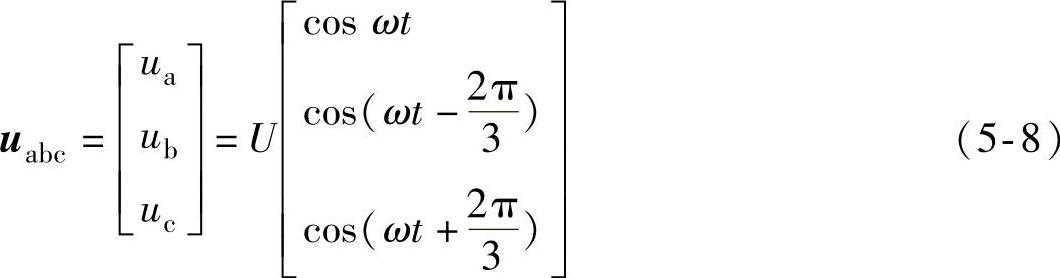
式中,U为三相电压幅值;ω为电压角频率;假设a相电压初始相位角为0。
选择平面内三个互差120°的单位矢量

对式(5-8)、式(5-9)求内积,可得电压空间矢量u,该电压矢量可用以表征三相电压的幅值、角频率和初始相位角,其与对应的三相电压之间的关系如图5-12所示,相对于abc静止坐标系而言,u沿逆时针方向以电压角频率ω同步旋转。


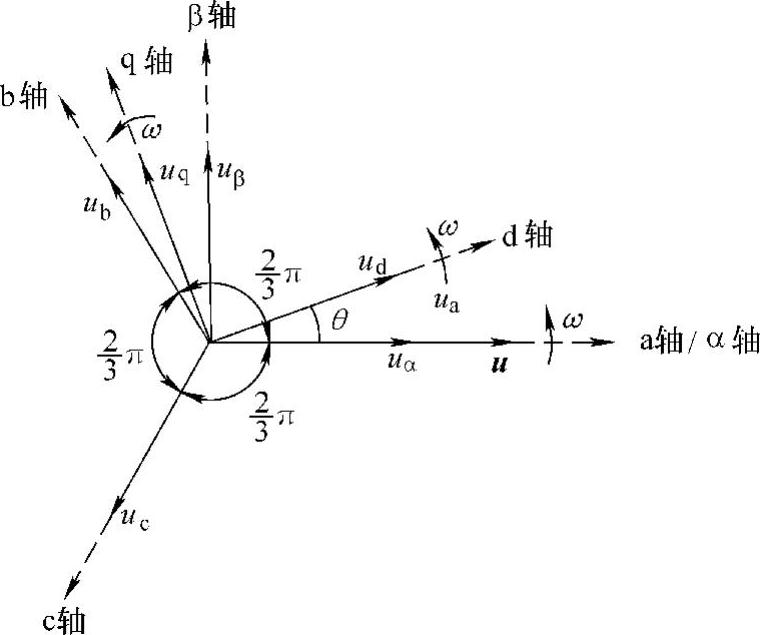
图5-12 不同坐标系下三相电压分量的关系
对于三相三线制系统,由于式(5-8)所示三相电压变量线性相关,即有ua+ub+uc=0,abc静止坐标系中的三相变量还可用两相静止αβ坐标系中的线性无关(相互解耦)的两个变量表示为

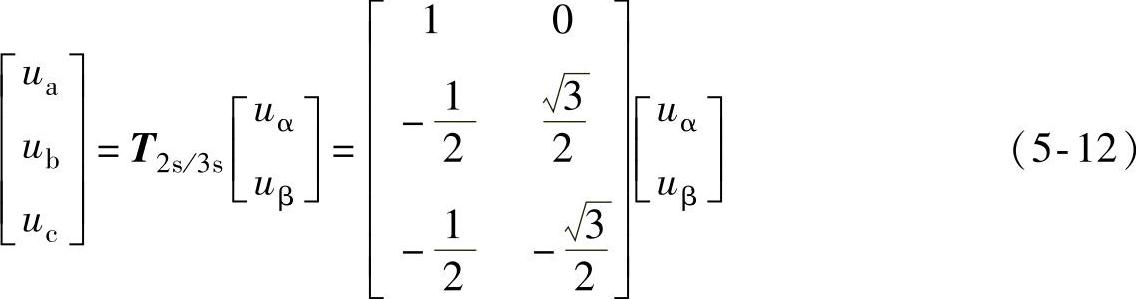
两相和三相静止坐标系之间的关系及式(5-11)所示的uα、uβ和ua、ub、uc的关系也如图5-12所示,其中,α轴与a轴重合,β轴超前α轴90°。相应地,静止坐标系下的两相到三相变量之间的变换可通过下式实现:
静止坐标系下的变量还可以通过以下帕克变换(Park Transformation)或称为旋转变换变换为旋转坐标系(dq坐标系)下的两相变量。

相应地,也可以通过如下逆变换将旋转坐标系中的dq轴变量变换为静止坐标系中的αβ轴变量。

如图5-12所示,相对于abc和αβ静止坐标系而言,dq轴在空间以角速度ω旋转,若a轴和d轴之间的夹角为θ,则有ω=dθ/dt。此坐标系下,三相电压变量可由两相独立的直流变量表示。该坐标系常被用于三相发电系统的控制和分析。
在电网发生不对称故障时,考虑Yd联结变压器对故障侧零序电压的隔离作用,若不考虑谐波分量,电网电压变量中只会出现负序分量,此时三相电压变量可以表示为

式中
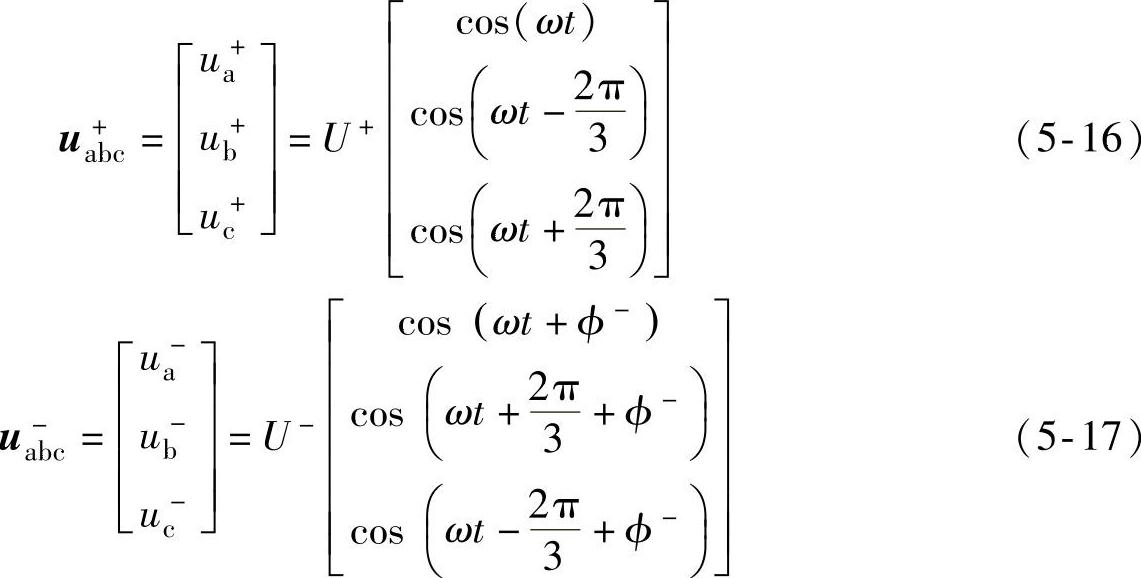
式中,a相正序电压分量的初始相位角设为参考值零,其负序电压分量的初始相位角为ϕ-。ua+bc,ua-bc可由对称分量法或式(5-2)求得。
在两相静止αβ坐标系下,正负序电压分量可以表示为

式中,uα+β=[uα+,uβ+]T;uα-β=[uα-,uβ-]T。
将式(5-2)代入,则αβ坐标系下的序电压分量可由三相电压分量uabc表示为

进一步,αβ坐标系下的序电压分量还可由两相电压分量uαβ表示为(https://www.xing528.com)

式(5-20)经化简后得到

式中

其中,q是90°相移算子, 。
。
可见,在两相静止坐标系下,正负序电压分量可由两相电压变量uαβ经过一定的相移和运算而得到。通过设计相移滤波器,即可由式(5-21)分离出正负序电压分量,这是基于静止坐标系实现锁相环的基本思路。
式(5-15)所表示的三相电压变量经式(5-11)和式(5-13)正序帕克变换可得到

式中,下角标+、-分别表示正负序旋转坐标系下的变量。
可见,在正序同步旋转坐标系下,正序电压分量可由两相直流电压分量表示,而负序电压分量则变换为两相两倍旋转频率波动的交流分量。同理,在负序同步旋转坐标系下,负序电压分量可表示为两相直流电压分量,而正序电压分量则为两相两倍频的交流分量。

通过设计合适的滤波器滤除其中的交流分量,即可得到相应的序电压分量,这是基于旋转坐标系实现锁相环的基本思路。
由上述分析可知,不同坐标系下的鉴相环节必须配置不同特性的滤波器,才可实现正负序电压的检测,滤波器性能的优劣直接决定锁相的速度和准确度,因而是软件锁相环的核心环节,下面将介绍几种软件锁相环中常用的滤波器。
2.低通滤波器(LPF)
低通滤波器可以滤除信号中的高频分量,其最简单的形式为一阶低通滤波器,传递函数为

式中,G0是零频增益;ωc是截止角频率。
令G0=1,ωc=1rad/s,则一阶低通滤波器的典型幅频特性如图5-13所示。由佩利-维纳准则可知,理想的低通滤波器是不可实现的,图5-13所示低通滤波器中,当信号频率高于其截止频率时,信号幅值以-20dB/十倍频程(dec)的速率衰减。在基于旋转坐标系的锁相环中,为实现正负序电压分量的分离,往往采用低通滤波器滤除信号中的两倍频交流分量。若滤波器采用式(5-24)所示的一阶结构,则需设计其截止频率低于两倍频的交流频率(对应基波频率为50Hz的系统,截止频率需低于100Hz)。
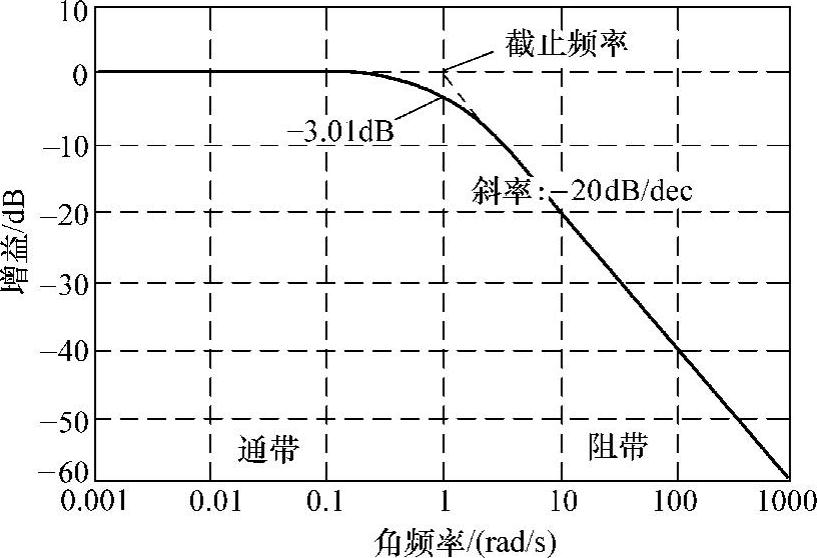
图5-13 一阶低通滤波器幅频特性
值得注意的是,除了滤除两倍频的交流分量外,低通滤波器还可同时滤除信号中的其他高频分量,因此若电压信号中含有谐波,基于旋转坐标系的锁相环也可顺利检测出基波电压的正负序分量。当然,锁相环的检测效果取决于低通滤波器对高频信号的滤波能力,选择更低的截止频率,有助于改善谐波信号对锁相准确度的影响,然而,此时锁相速度会受到影响[21]。为降低低通滤波器的高频增益且不影响其低频增益,还可以采用高阶的低通滤波器,如二阶的巴特沃斯或切比雪夫滤波器[21]等,在此不再赘述。
3.延时滤波器(DSC)
延时滤波器适用于噪声信号频率已知的场合,其原理比较简单直观:将噪声正弦信号延时半个周期,所得新信号与原信号大小相同、方向相反,将这两个信号叠加,结果为零,就可消除噪声,即

若已知噪声信号的频率,可利用式(5-25)的延迟滤波器消除此特定频率的噪声,该方法的数字化实现较容易[16]。
基于旋转坐标系实现锁相环时,正序旋转坐标系中,正序电压信号为直流量,负序电压信号为两倍频交流分量,采用式(5-25)所示延迟信号滤波器,将延时1/4工频周期的信号与原信号叠加,可消除原信号中的两倍频交流(负序)分量,与此同时,直流(正序)分量的幅值被扩大两倍,可通过比例计算将其还原。
4.二阶自适应滤波器(SOAF)
二阶自适应滤波器本质上是一种针对正弦信号的带通滤波器,其基本结构如图5-14所示[22]。若正弦输入信号u中含有噪声信号,另一路参考输入x经自适应滤波后得到不含噪声的正弦信号u′,u和u′的误差e被反馈回自适应滤波环节以调整u′。
实现图5-14中自适应滤波环节的方法很多,其中,二阶广义积分器(Second Or-der Generalized Integrator,SOGI)结构简单、计算复杂度低,更易被应用于实际系统。二阶广义积分器的设计思路来源于传统的广义积分器(Generalized Integrator,GI)[22],为双输入双输出闭环系统,由其构成二阶自适应滤波器的结构如图5-15所示。输入u、ω分别为正弦信号的瞬时值和角频率,输出为两路正交的正弦信号u′、u″,u″由u′经积分后得到。
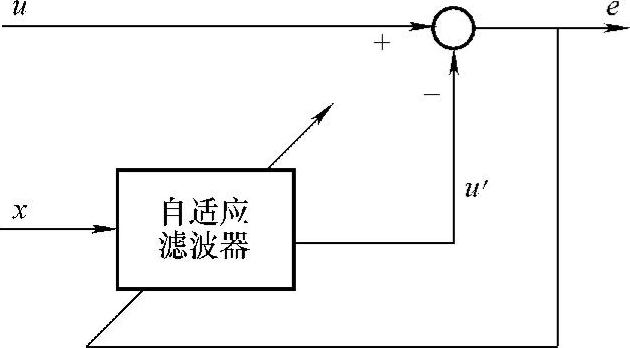
图5-14 二阶自适应滤波器基本结构
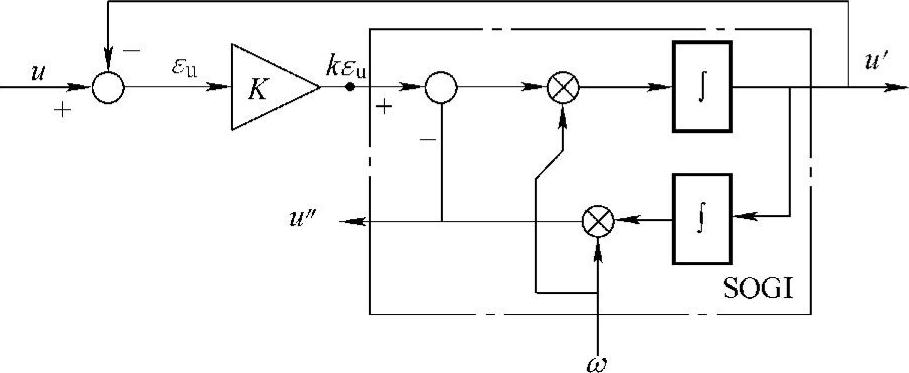
图5-15 基于SOGI的二阶自适应滤波器控制框图
图5-15中,滤波器的核心环节为SOGI,其传递函数为

SOGI本质上是一种带通滤波器,当其中心频率ω取为电网角频率100π rad/s时,式(5-26)对应的幅频和相频特性如图5-16所示。对于中心频率处的信号,SOGI的增益非常大,相移为零;该带通滤波器的带宽非常窄,当信号频率稍稍偏移中心频率时,增益迅速衰减,因而该滤波器对于输入信号频率波动的鲁棒性较差。
进一步,由图5-15可得基于SOGI的二阶自适应滤波器输入-输出的传递函数为
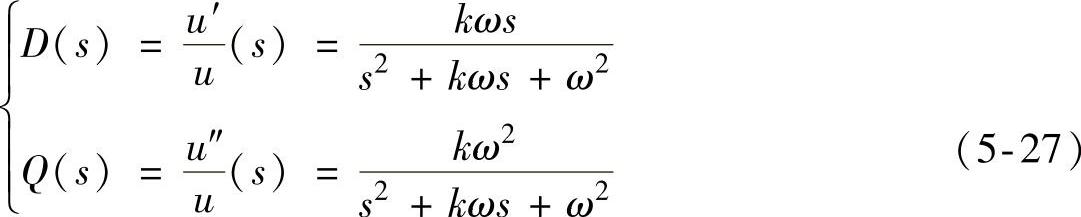
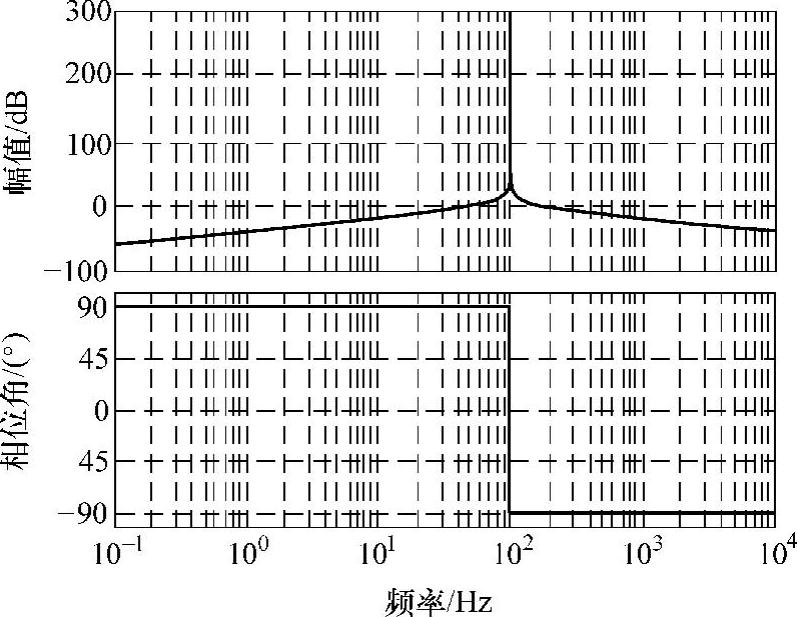
图5-16 SOGI幅频和相频特性
其幅频和相频特性曲线如图5-17所示。可见,图5-15所设计的滤波器本质上也是带通滤波器,与SOGI相比,其频带被延展,对输入信号频率波动的鲁棒性变强,当参数ω一定时,其带宽仅与k有关;对于输出u″而言,在带通滤波的同时,该滤波器还可以实现中心频率信号的-90°相移,呈现相移滤波的特性,由式(5-21)可知,若输入信号为两相静止坐标系下的电压分量uαβ,则应用该滤波器,且将滤波后的信号经适当运算可实现uαβ的正负序分量分离。
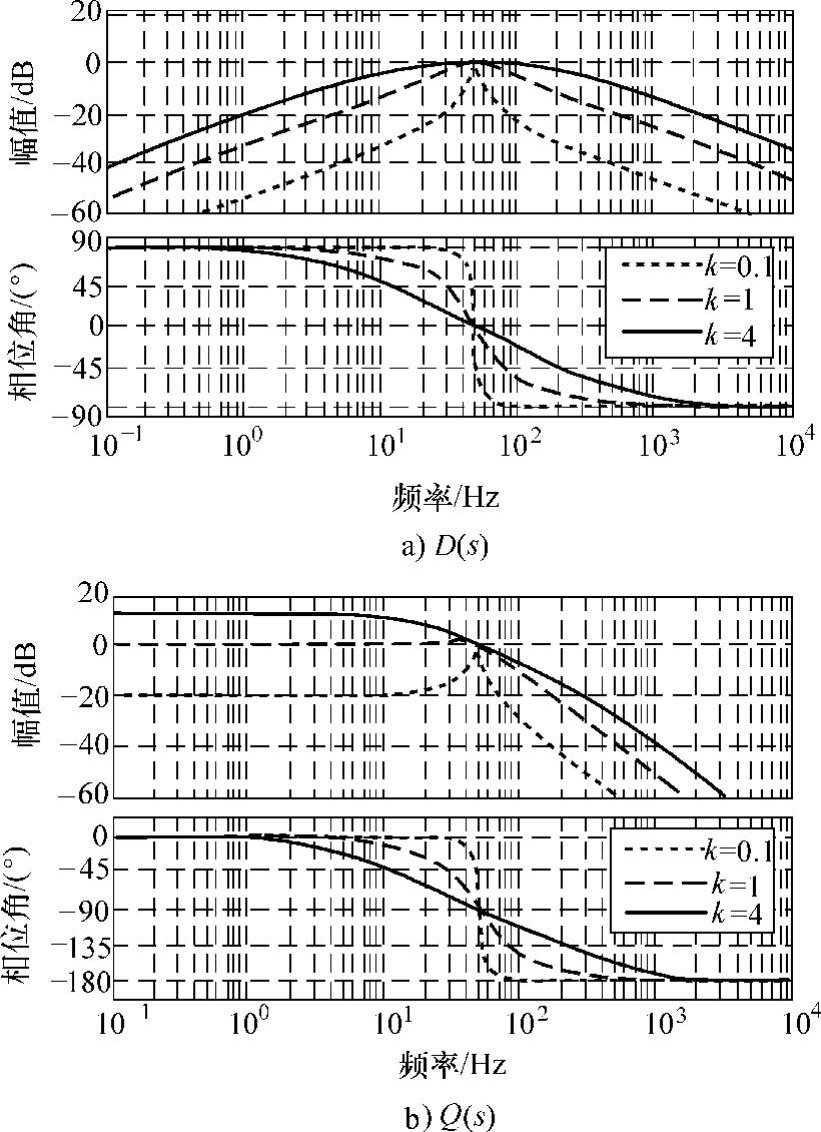
图5-17 基于SOGI二阶滤波器的输入输出特性
除了上述滤波器以外,还有其他结构的滤波器,比例正弦信号积分器(Por-tional-Sinusoidal Signal Integrator,P-SSI)[23]、三阶自适应陷波滤波器(Adaptive Notch Filter,ANF)[24]等也可应用于正负序电压分量的检测中。一方面,从本质上来看,这些滤波器都是与基于静止坐标系或旋转坐标系下的PD结合使用的,其特性与前面提到的低通或带通滤波器相似;另一方面,在复杂度和滤波性能方面,上述滤波器并不具有更大的优势,因而本书不再进行详述。
基于以上PD和LF环节,在静止和同步旋转坐标系中可实现不同结构的锁相环。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。