



1.回到表2/2,单击PIDE指令的属性按钮 省略号,然后单击“整定”(Autotune)选项卡,如图16-26所示。
省略号,然后单击“整定”(Autotune)选项卡,如图16-26所示。
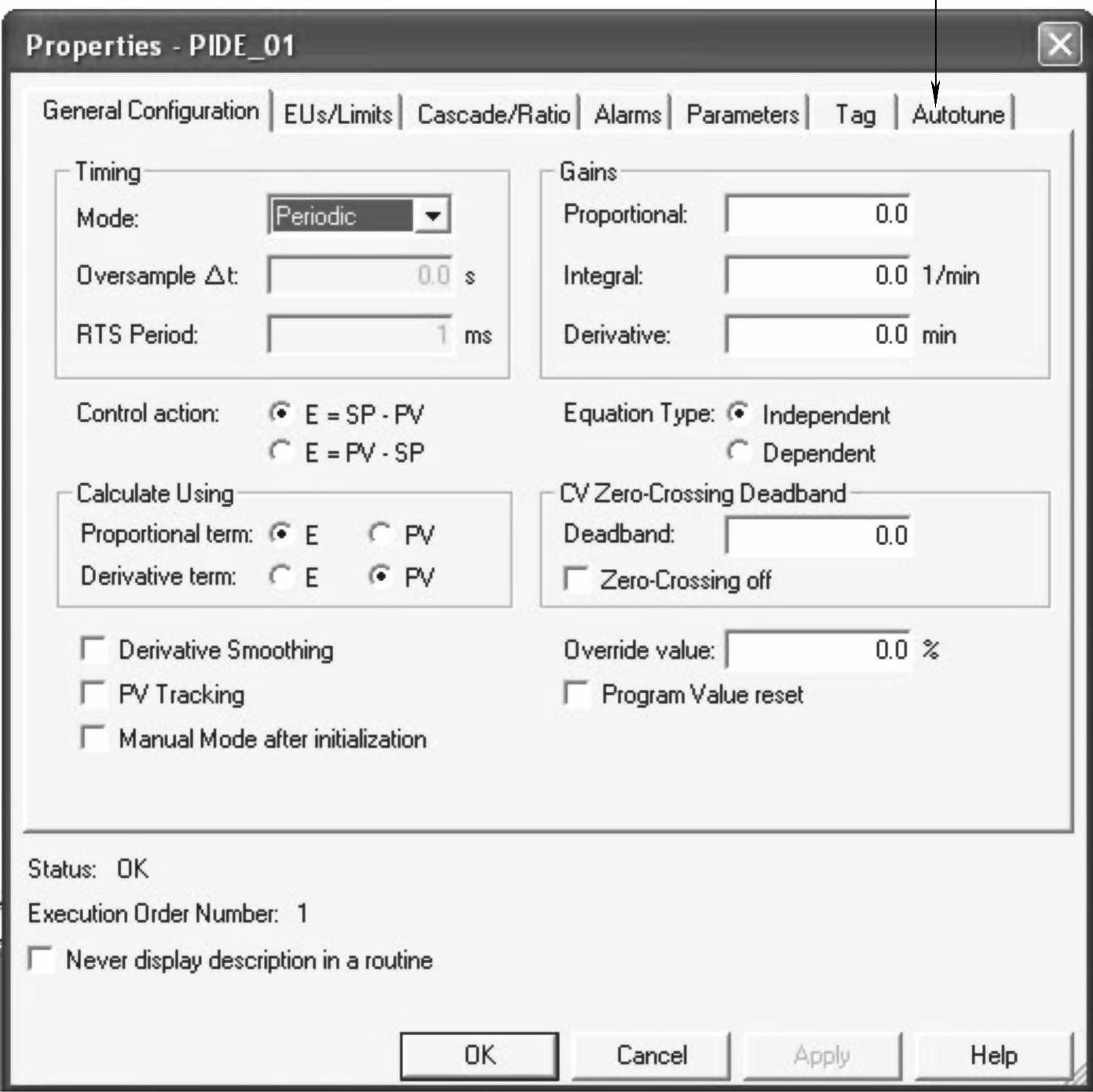
图16-26 “整定”选项卡
2.通过单击“获取标签”(Acquire Tag)按钮获取自整定资源(标签)。标签现在应当可用于此PIDE以及自整定,如图16-27所示。
参考信息
在RSLogix 5000中PIDE底部输入的自整定标签作为一项资源,既可以专属于单个PIDE,也可以由许多PIDE共享。在共享资源时,对于某一次整定,同一时刻只有一个PIDE可以使用该自整定标签。如此一来,就必须有一种方法来“获取”要使用的资源,然后“释放”资源以便其他PIDE可以再次获取和使用。本段对话主要论述资源获取和随后的释放。要获取或释放资源,只需单击相应按钮。状态指示器显示自整定资源(标签)的当前状态。
3.按照下图所示配置自整定,然后单击“应用”(Apply)接受所做更改,如图16-28所示。

图16-27 获取自整定资源
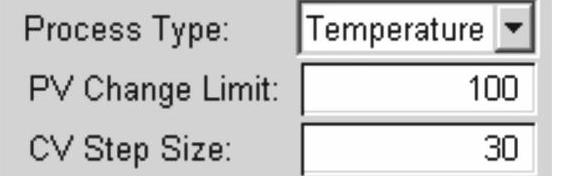
图16-28 自整定配置
自整定通过将PIDE CV在其当前值基础上增加30%来调节“温度”过程,如果过程变量在自整定完成前会超过100,则将中止自整定过程。
参考信息
“过程类型”(Process Type)指定要调节的系统为何种类型。这很重要,因为可能会影响选择用于自整定测试的模型类型(积分/无积分等)。
“PV变化极限”(PV Change Limit)是针对所引用PIDE配置的绝对限值(以工程单位表示),如果系统在自整定过程中将超出该限值,则会停止(中止)自整定步骤。
“CV步长”(CV Step Size)是自整定对PIDE CV进行更改的幅度,以便控制系统。在自整定执行期间,此处输入的数值(单位为百分比)将被累加到当前CV值上。
4.点击“自整定”(Autotune)按钮,显示PIDE自整定启动界面,如图16-29所示。
5.单击“启动”(Start)按钮,开始自整定过程,如图16-30所示。此过程可能耗时几分钟。(https://www.xing528.com)
请注意,“执行状态”(Execution State)为“正在进行”(In Progress),“中止”(Abort)按钮是可用的。
6.自整定完成后,首先应当确认“执行状态”(Execution State)为“完成”(Complete),并且各项增益应当如图16-31所示。
该部分显示基于上一次成功自整定的推荐增益,以及PIDE中使用的当前增益。
7.通过选择慢对应的单选按钮,将“慢速响应”(Slow Response)这组增益加载到PIDE中。
8.单击“设置PIDE中的增益”(Set Gains in PIDE)按钮,如图16-32所示。
请注意,PIDE中的当前增益已经因为选择“慢速响应”而发生变化。
9.关闭“自整定”(Autotune)和“整定”(Tune)对话框,以返回FBD的表2/2。
请注意PID_PV值的变化。
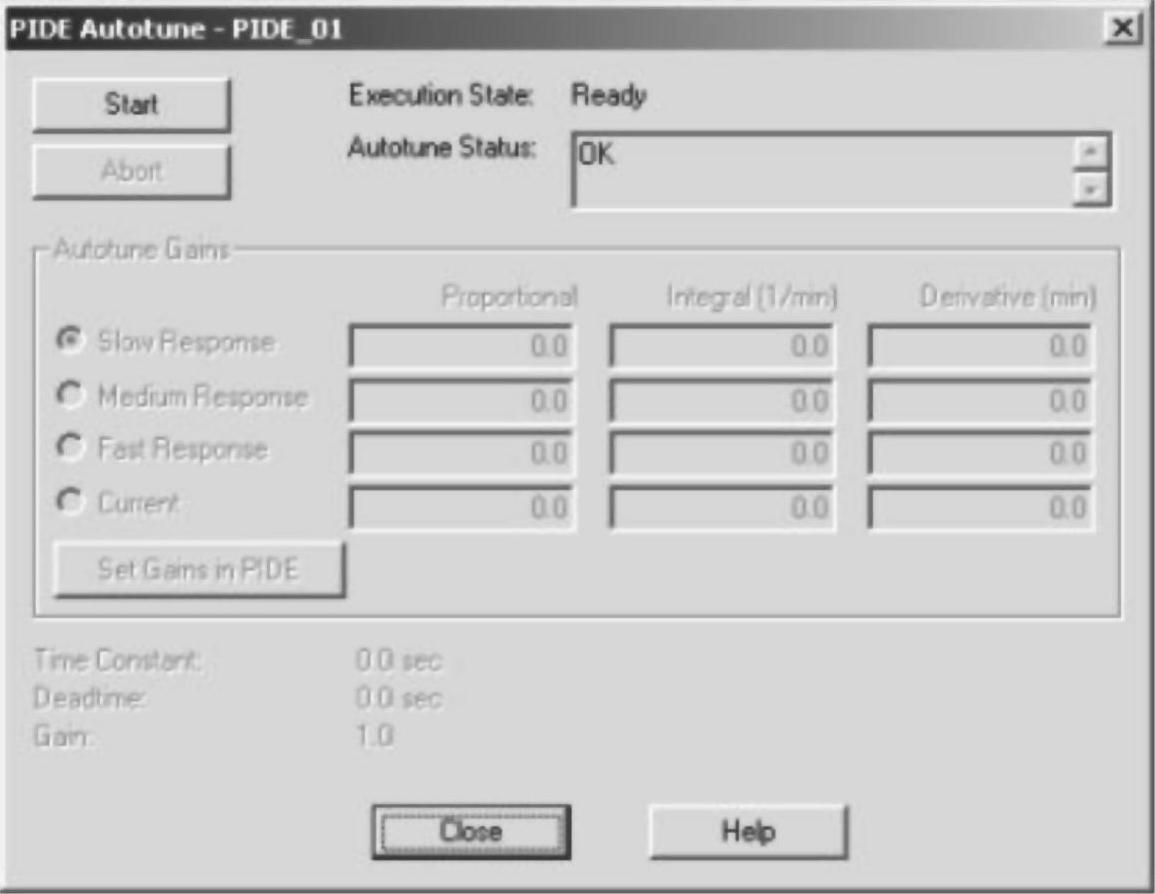
图16-29 PIDE自整定启动界面
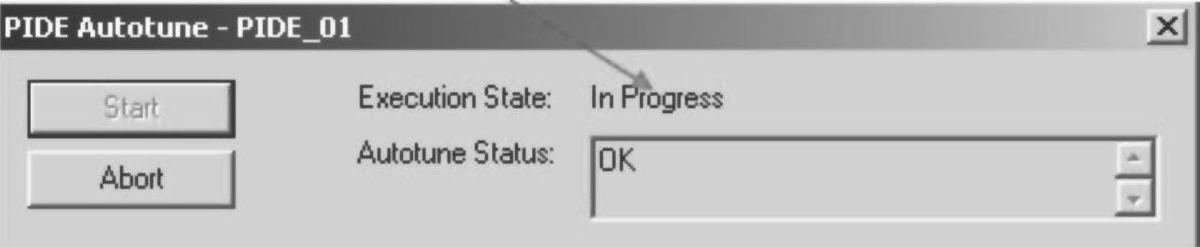
图16-30 自整定过程
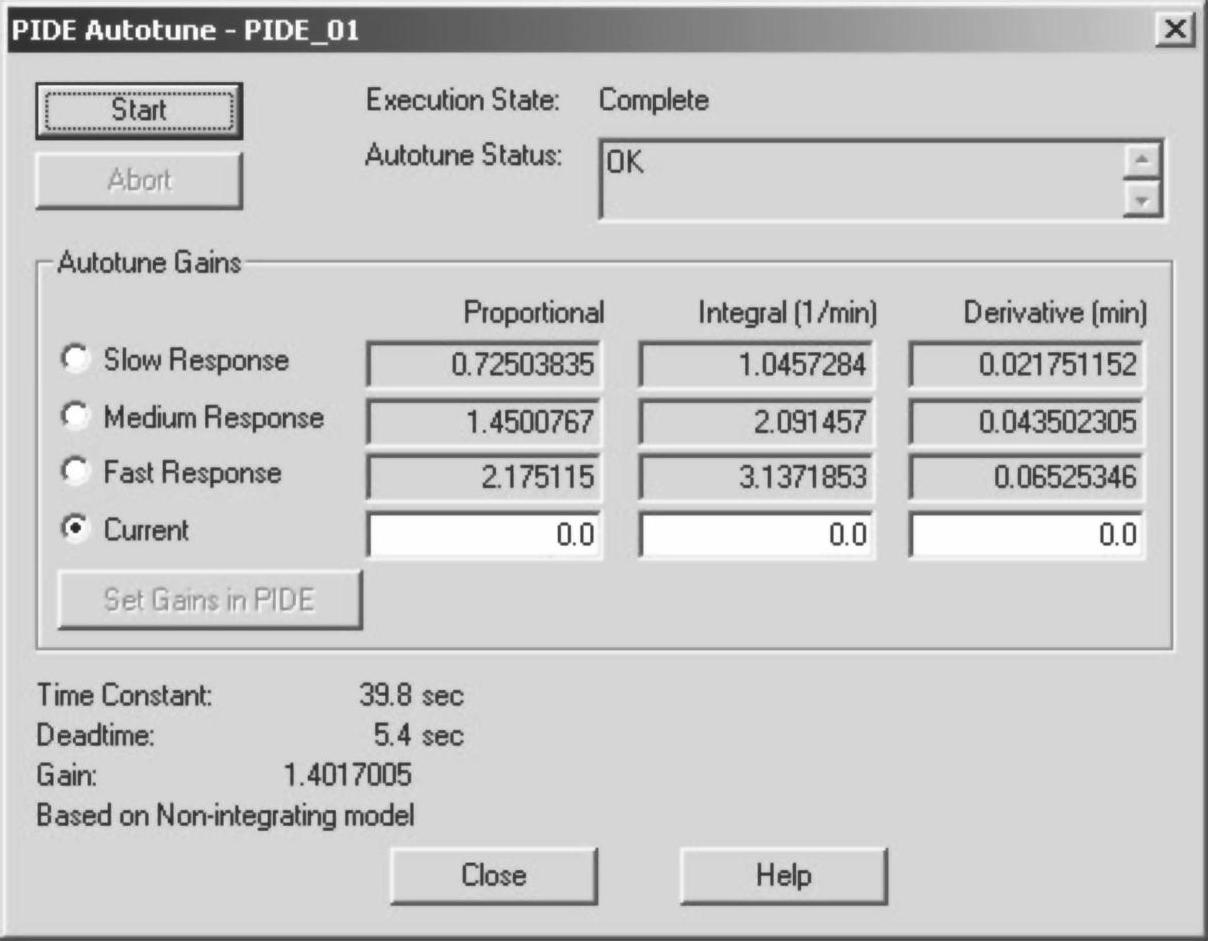
图16-31 自整定完成
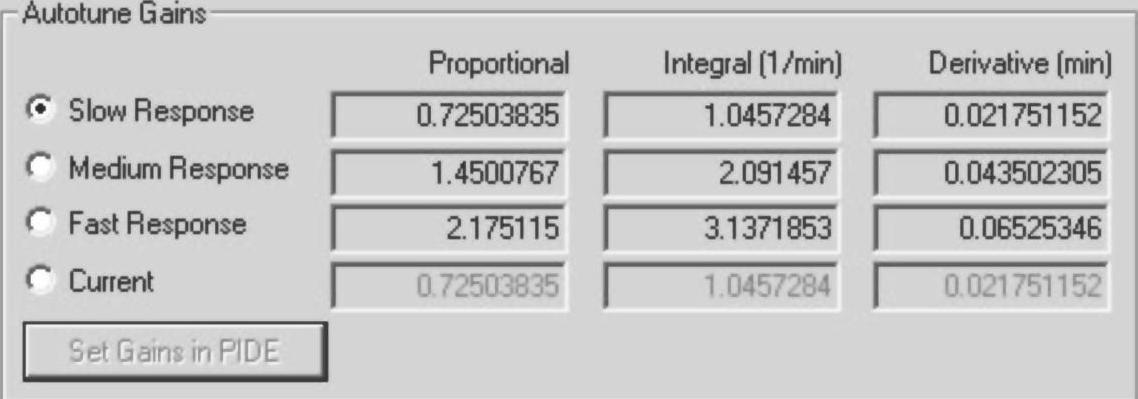
图16-32 设置PIDE中的增益
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。