



1.在控制器项目管理器中双击FB_Routine例程。
工作区中会打开一个空白工作表。
2.在命名空间编辑框中将此表命名为“TIC101”,如图16-8所示。
图16-7 FB_Routine例程

图16-8 命名空间编辑框中
添加到图中的第一个块为增强型PID块(PIDE),用于控制模拟循环。
3.在工具栏中的“过程”(Process)选项卡上,单击PIDE功能,如图16-9所示。
PIDE块现在应显示在图中。
4.单击该块的“属性”(Proper-ties) 按钮,花些时间查看一下所有可用参数。
按钮,花些时间查看一下所有可用参数。

图16-9 过程选项卡
注意:共分7个选项卡;“参数”(Parameters)选项卡列出了块中的所有参数。
第一列显示该参数是块的输入(I)还是输出(O)。而且在参数选项卡中,还可以使用第二列中的复选框来显示或隐藏功能块图中的参数引脚。
5.单击“确定”(OK),关闭PIDE属性对话框。
6.在工具栏上单击“输入线连接器”(Input Wire Connector),如图16-10所示。
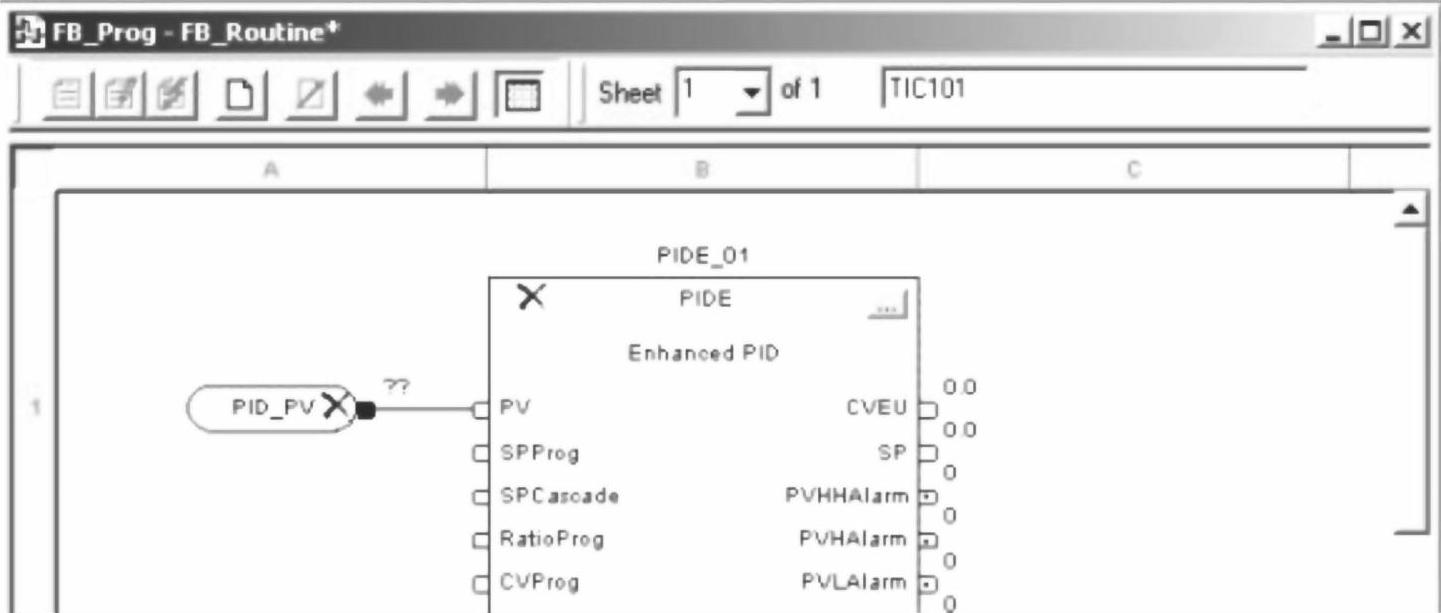
7.将输入线连接器(通过拖拽)移动到PIDE块的输入(左)侧并用线将其连接到PV点上,方法为单击一下输入参考输出引脚,再单击一下PIDE PV输入引脚。
注:可以单击并拖拽指令在表中任意移动。如果将鼠标悬停在有效连接点上方,则引脚会变为绿色。
8.双击线连接器引用,打开输入标签名称的对话框,键入“PID_PV”并按回车接受,如图16-11所示。
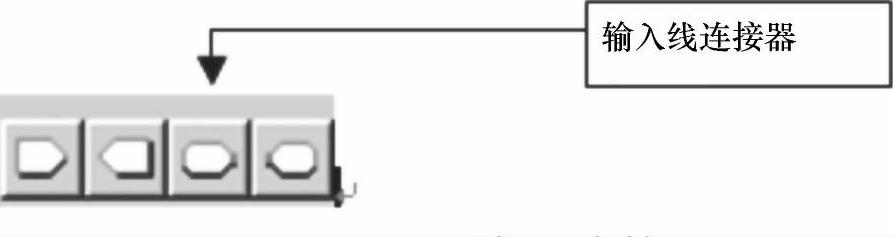
图16-10 输入连接器
 (https://www.xing528.com)
(https://www.xing528.com)
图16-11 输入标签名称
9.在工具栏上单击“输出线连接器”(Output Wire Connector),如图16-12所示。
10.将输出线连接器(通过拖拽)移动到PIDE块的输出侧并将其连接到CVEU点上,方法为单击一下PIDECVEU引脚,再单击一下输出线连接器输入引脚。
11.双击线连接器引用,键入“PID_CV”并按回车接受,如图16-13所示。

图16-12 输出连接器
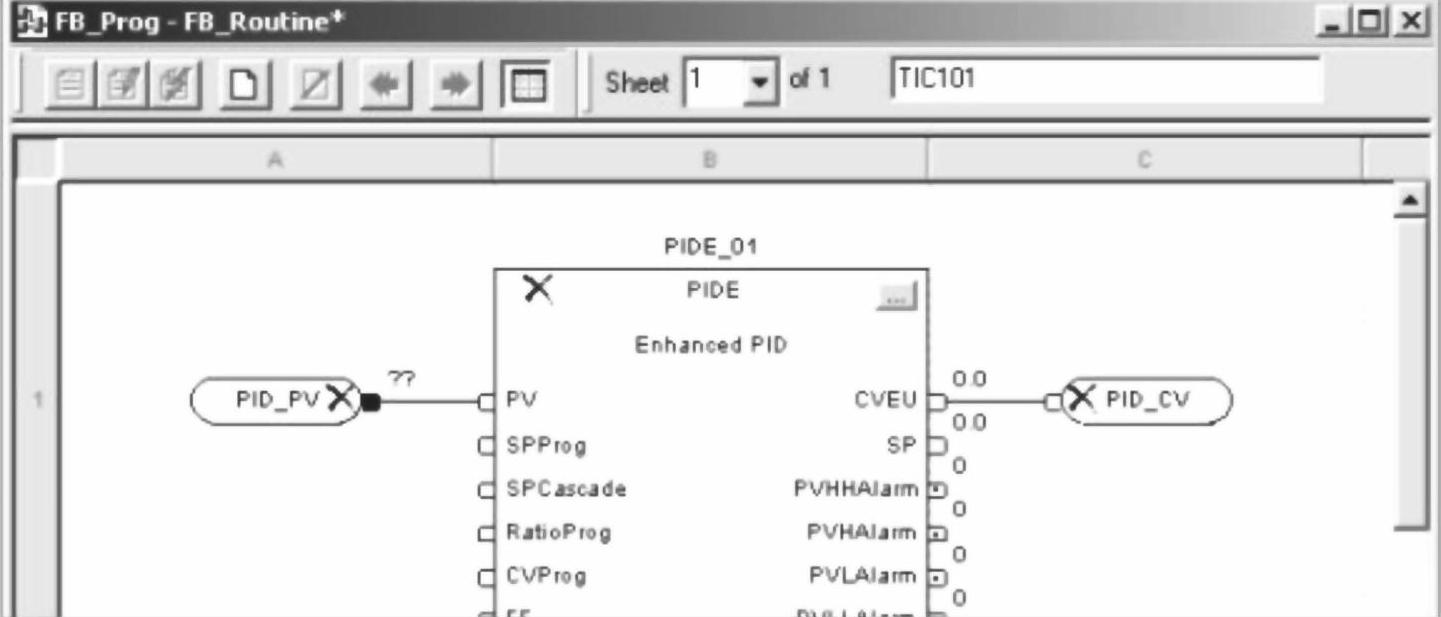
图16-13 输出标签名称
12.右键单击PID_PV输入线连接器到PIDE_01.PV的引线,并从弹出的列表中选择“假设数据可用”(Assume Data Available),如图16-14所示。
将这条线设置为“首先可用”数据点,意味着让表假定这条路径应首先评估。下一节中的模拟将创建到PIDE_PV参数的回路。
自整定功能需要关联PIDE_AUTOTUNE标签才能对回路进行自整定。
13.在PIDE功能块的底部,双击?输入自整定标签名称。
14.在字段中键入“PIDTune”,并按回车接受,如图16-15所示。
15.右键单击PIDTune标签引用,选择“新建‘PIDTune’”(New“PIDTune”)创建自整定标签。
16.按照图16-16所示填写“新建标签”(New Tag)对话框,然后单击“确定”(OK)接受所做更改。
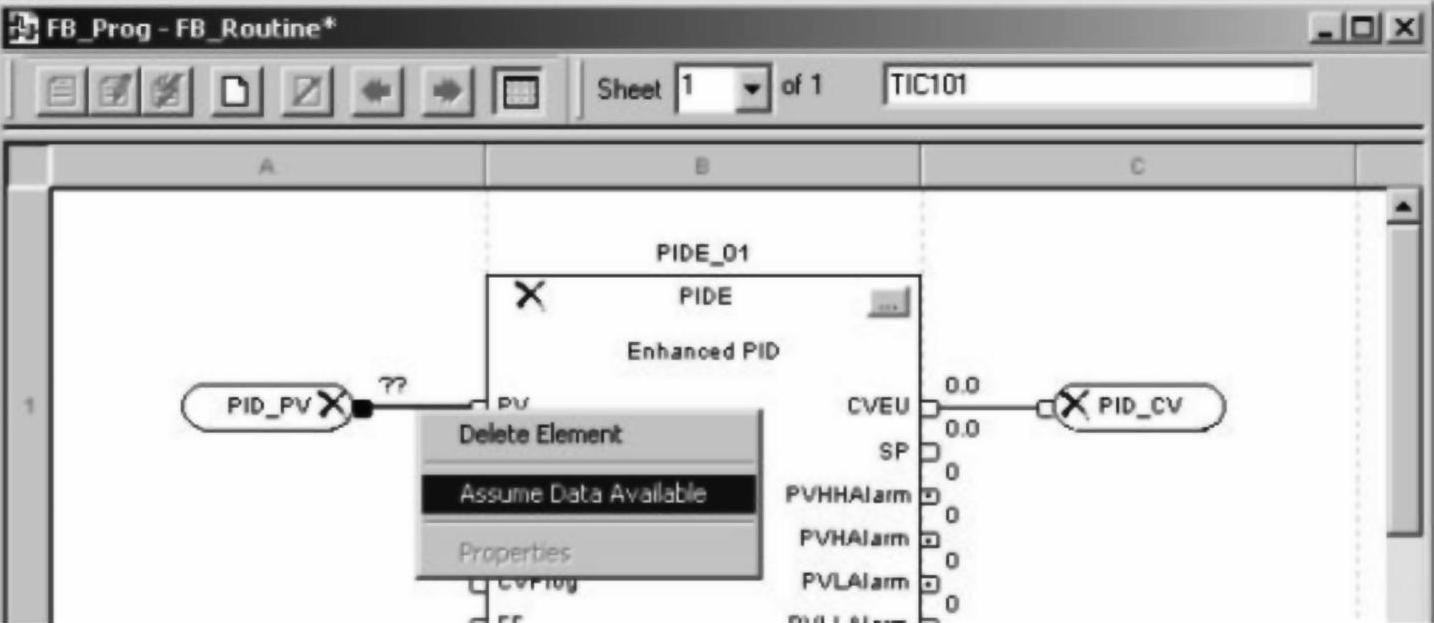
图16-14 假设数据可用选项

图16-15 键入“PIDTune”
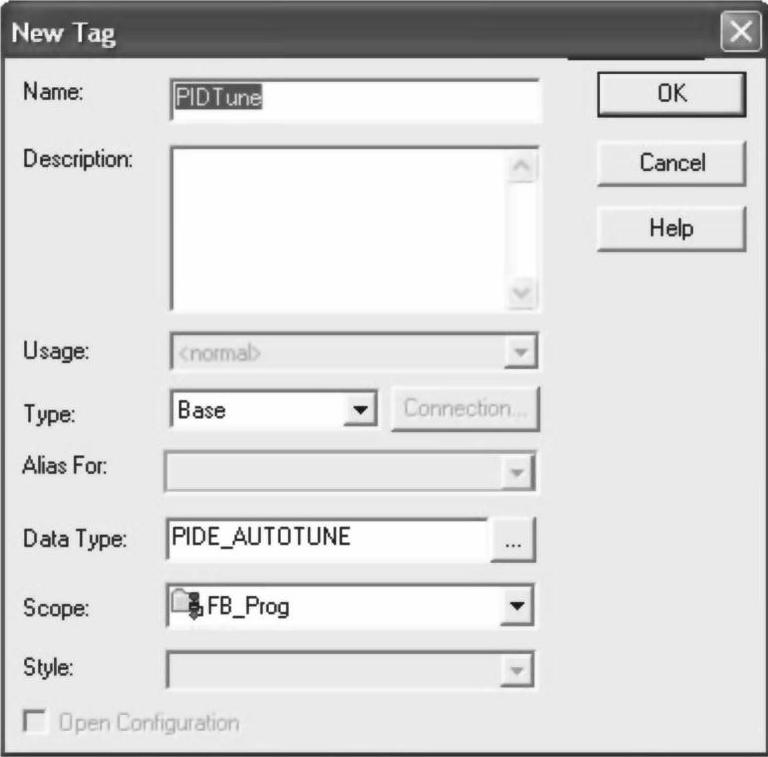
图16-16 “新建标签”对话框
17.保存项目。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。