



为进一步验证采用的矢量控制策略,在搭建的高性能级联型变频器实验平台上进行相关实验研究,图7-55所示为给定转速和实际转速曲线。由实验波形可见,稳态时转速的实际值和给定值基本相等,达到了给定值1500r/min,即标幺值1.0,在稳态运行过程中,实际转速存在轻微的抖动。图7-56所示为给定转速和实际转速上升曲线图,通过对实际转速曲线的局部放大可发现,在起动阶段约有130ms的短时间延迟,其主要原因是磁通尚未完全建立;进入稳态有小幅度的超调;在动态加减速过程中,实际转速整体上能快速准确地跟踪给定值的变化。
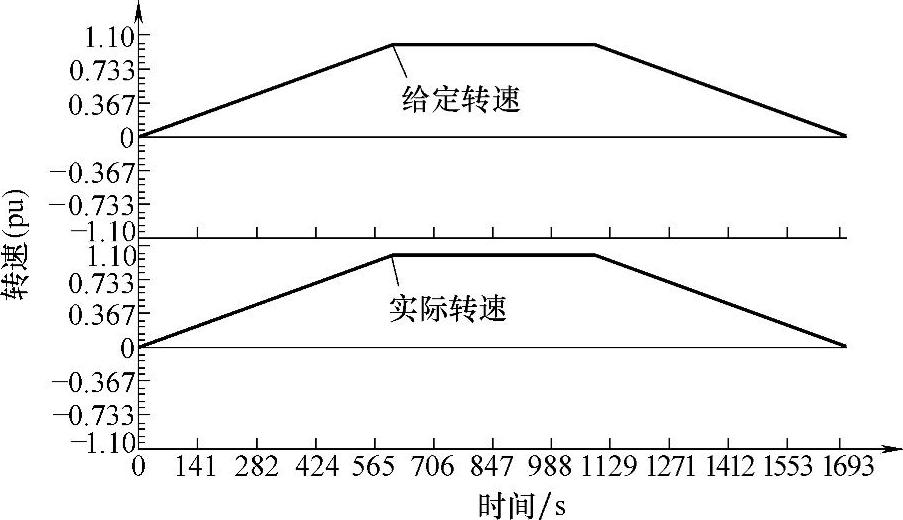
图7-55 给定转速和实际转速实验波形
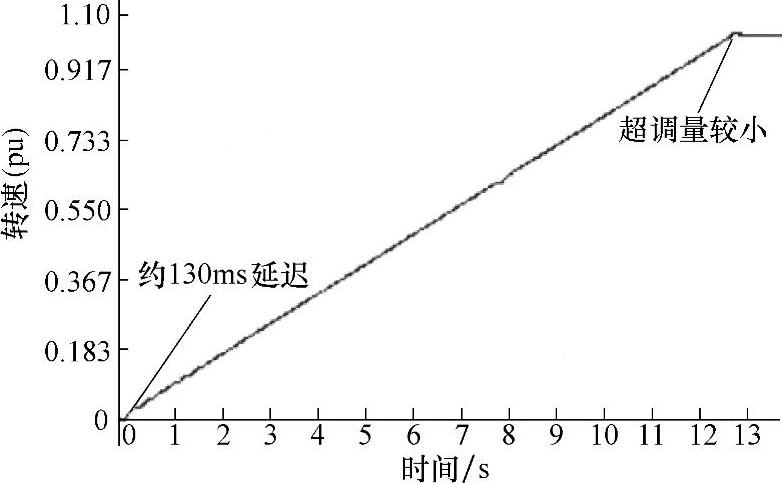
图7-56 给定转速和实际转速上升曲线
磁通的给定值和观测值实验波形如图7-57所示。由图可见,磁通在1.3s能够稳定下来,建立时间较快,和给定值的误差基本为零,达到了设定的标幺值0.8。此时的定子电流d轴励磁分量给定值和实际值如图7-58所示。实验波形表明,能够以较大的电流建立磁场,之后励磁电流实际值以给定值为中心线上下有一定波动。
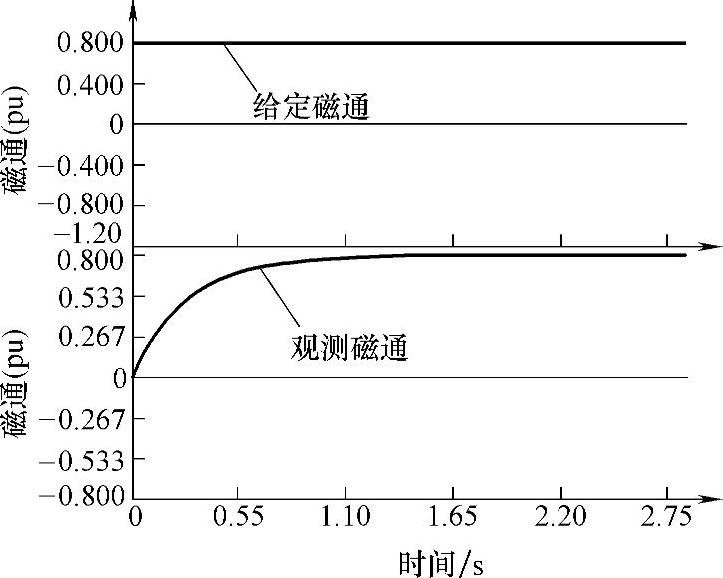
图7-57 磁通建立过程实验波形
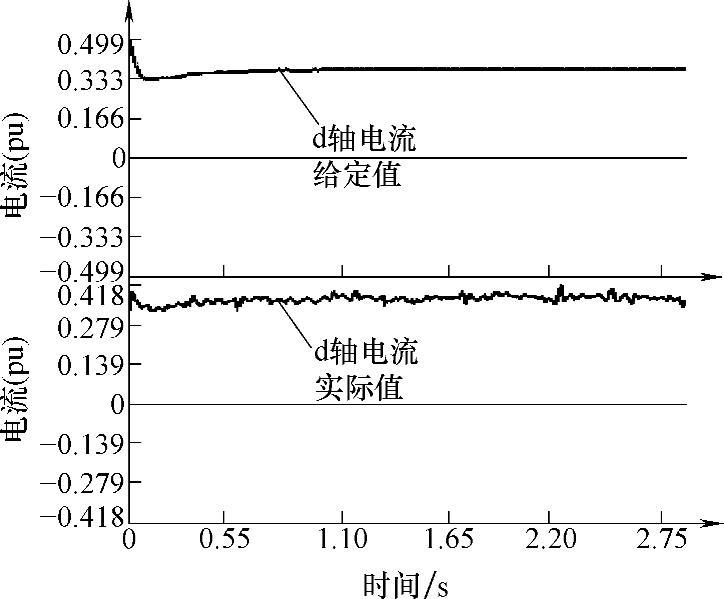
图7-58 磁通建立过程d轴电流波形
图7-59、图7-60所示分别为磁通改变实验波形和磁通改变时d、q轴电流变化波形。由图可见,当电动机以500r/min转速稳态运行时,改变磁通给定值的大小,即由标幺值0.8降为0.5,磁通能够在约0.8s到达新的稳态值,d轴励磁电流随之变化、响应迅速,而q轴转矩电流则基本保持不变。
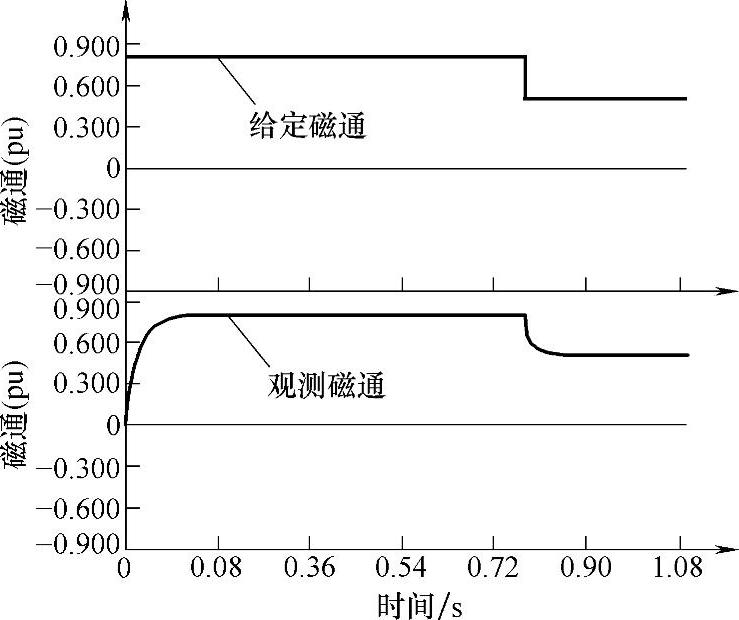
图7-59 磁通改变实验波形
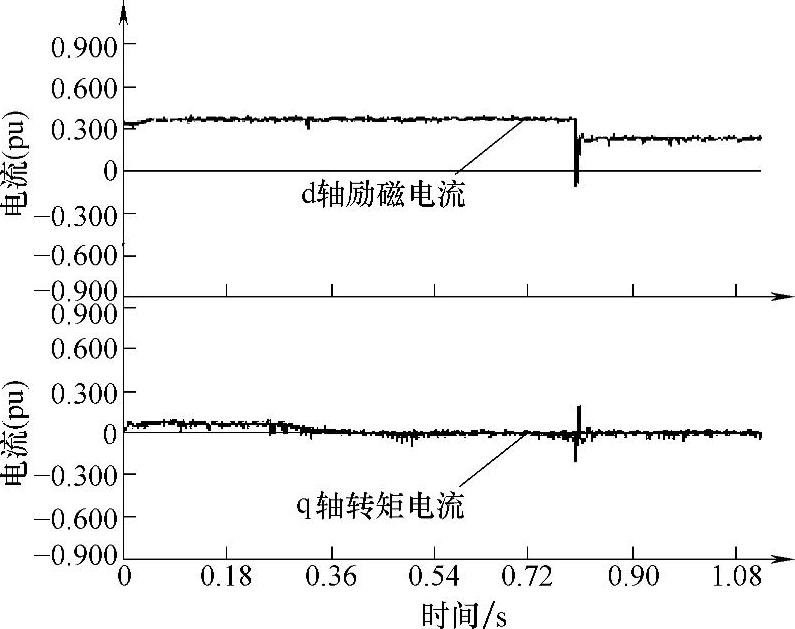
图7-60 磁通改变时d、q轴电流变化波形
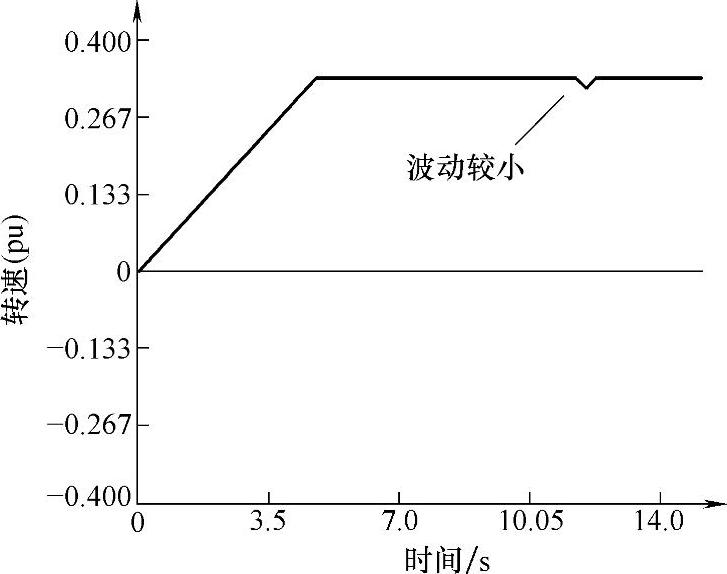
当电动机在以500r/min转速稳定运行时,进行加载测试,转速波形如图7-61所示。由图可见,当加载瞬间,转速有一定跌落,之后转速能够很快恢复到500r/min,系统抗负载扰动能力较强。加载测试的输出电流波形如图7-62所示。在突加负载时,电流幅值随之增加,在2s时间内能够基本稳定到新的状态。
图7-63、图7-64分别给出了突加负载时d、q轴电流波形。由图可见,定子电流d轴分量基本保持不变,而定子电流q轴转矩分量与负载同步变化、响应迅速。
 (https://www.xing528.com)
(https://www.xing528.com)
图7-61 突加负载时转速波形
实验结果表明,定子电流励磁分量和转矩分量基本没有耦合现象,磁通单独由励磁电流分量改变,转矩单独由转矩电流分量改变,实现了异步电动机矢量控制算法的解耦控制。
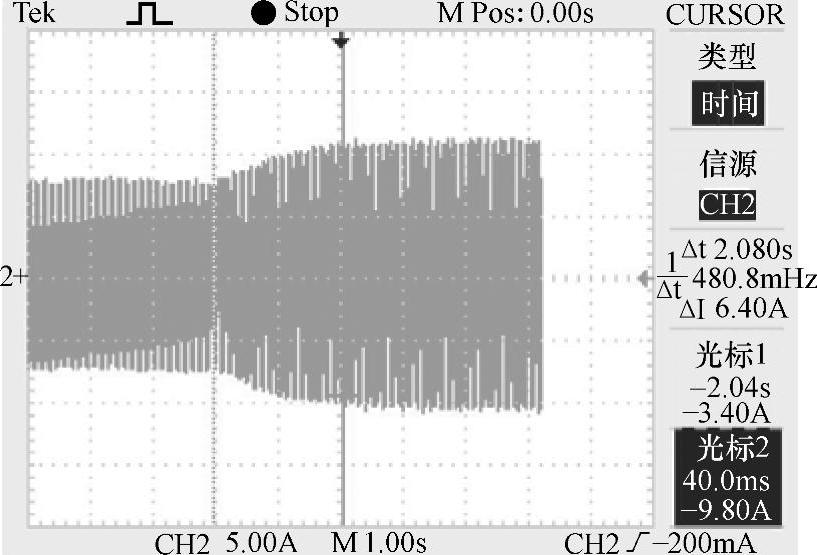
图7-62 突加负载时输出电流幅值变化
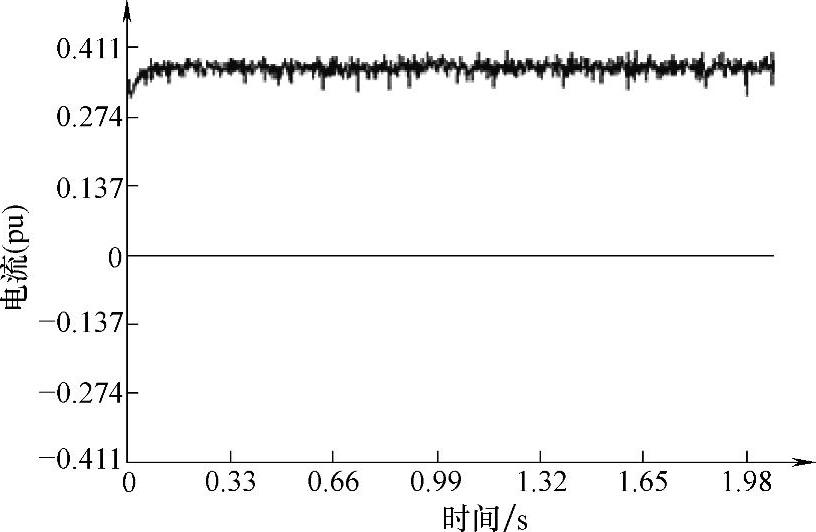
图7-63 突加负载时d轴电流波形
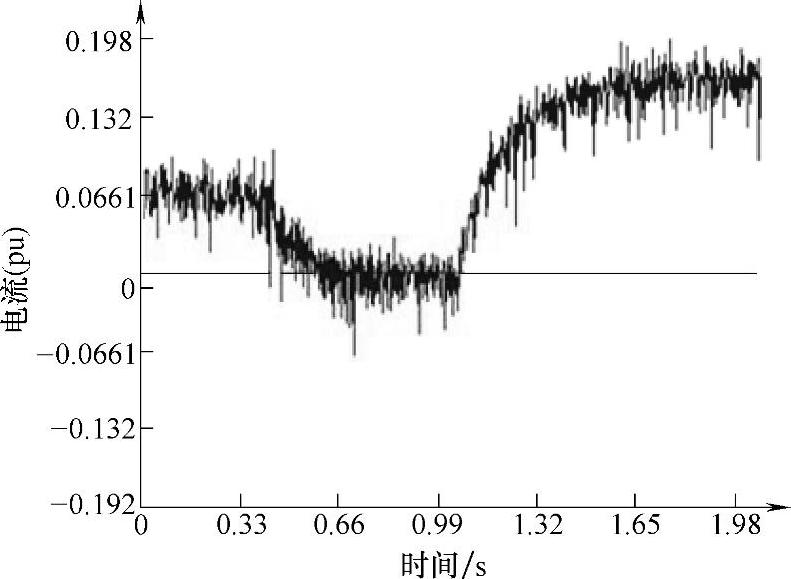
图7-64 突加负载时q轴电流波形
与U/f相比,矢量控制的优势在于其低速带载性能更强。低速带载实验波形如图7-65、图7-66所示。实验中阶跃给定电动机转速为60r/min,即2Hz,转矩设定为额定转矩的两倍,带载起动。由图7-65可见,实际转速能够在0.5s左右达到设定转速,响应比较迅速。由图7-66可见,起动过程中,定子电流冲击较小,并且能够很快达到稳态。
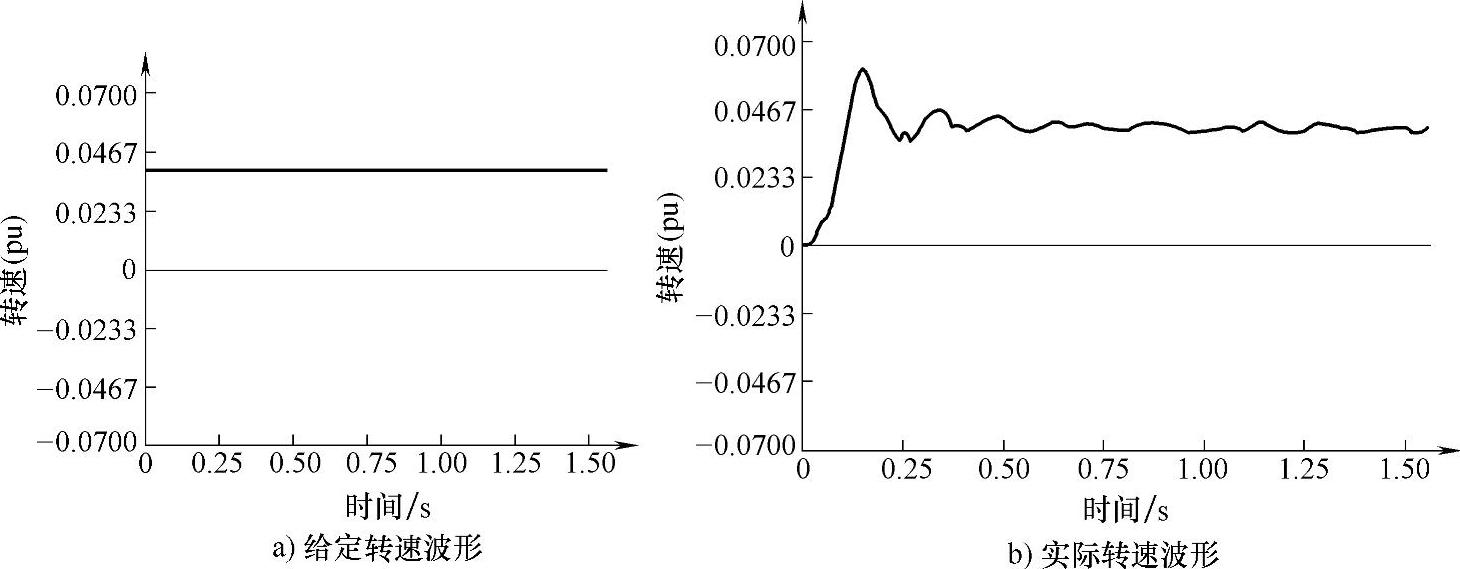
图7-65 阶跃给定转速和实际转速波形
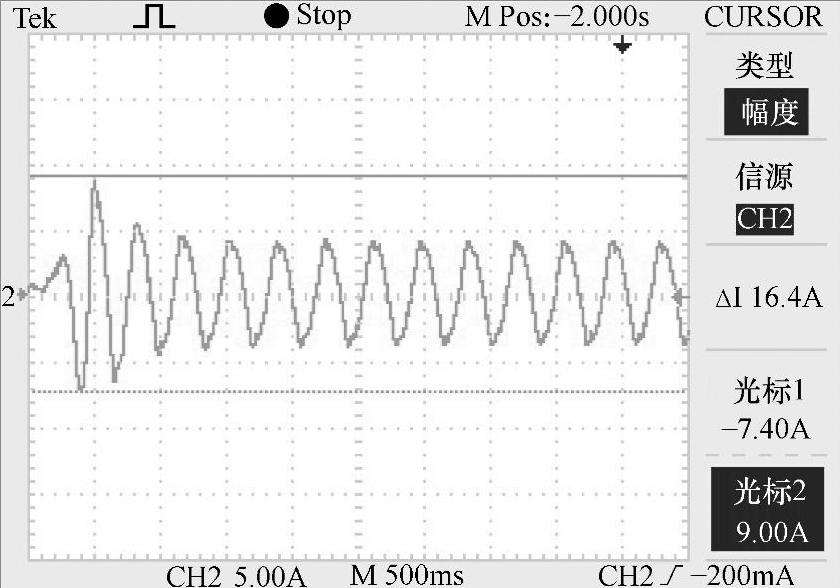
图7-66 阶跃给定输出电流波形
为了对比低速加载的电流变化,又进行了在2Hz运行突加两倍负载的实验,测得的d、q轴电流分量波形如图7-67所示。由图可见,d轴电流在给定值附近波动,q轴电流分量在突加转矩时能够很快地响应,在一个过冲之后能够很快稳定。
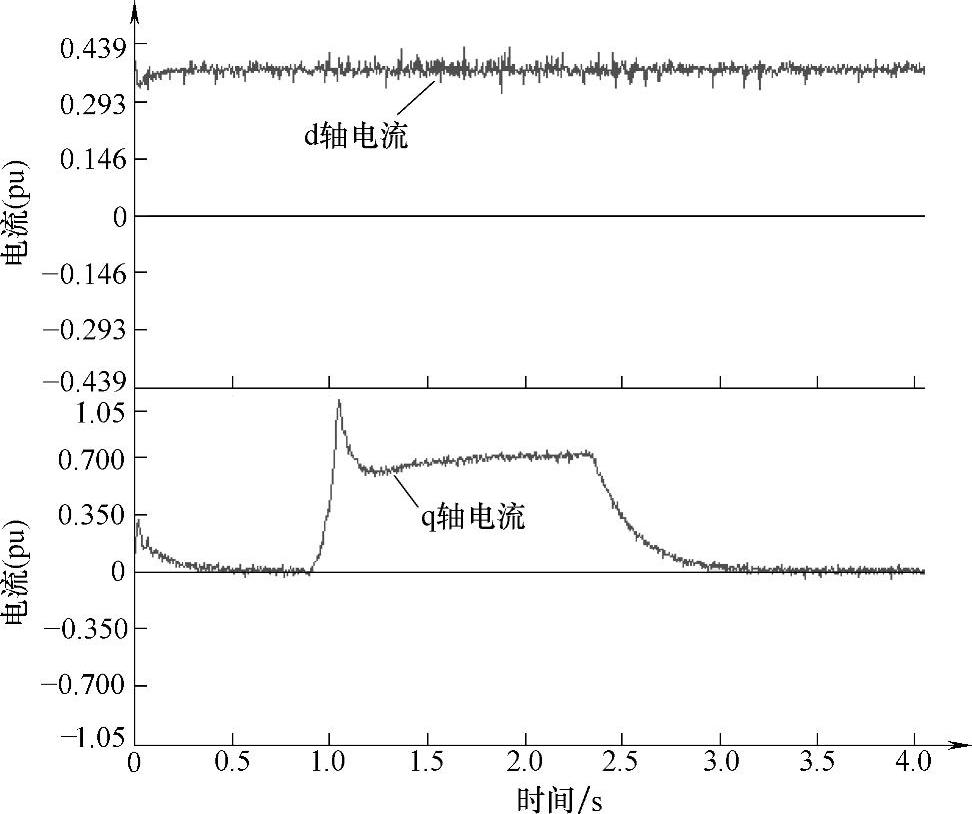
图7-67 2Hz低速运行时d、q轴电流分量波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。