



基于前面章节对多单元矢量控制系统理论介绍和原理分析,本节将介绍级联型矢量控制系统的仿真研究。系统仿真模型是基于Matlab/Simulink提供的基本模块搭建而成,如图6-24所示。其中电动机参数:额定功率为PN=7.5kW,额定电压为UN=380V,极对数pn=2,额定转速为nN=1450r/min,定子等效电阻为Rs=0.75Ω,转子等效电阻为Rr=0.75Ω,互感为Lm=124.1mH,定、转子电感为Ls=Lr=127.1mH。
图6-24仿真模型中矢量控制部分与图6-4所示的矢量控制部分一致,其主要模块包括:转差计算,坐标变换,PI调节器,磁链观测几个部分,作用是完成转速环、转矩环、电流环的闭环控制,使电动机的调速性能达到要求。此外,载波移相仿真模型如图6-25所示。
图6-26~图6-30所示为仿真波形,其中图6-26所示为输出到电动机定子线电压仿真波形,由图可见,移相载波可以有效增加电压台阶数,降低谐波含量,使之趋于正弦;图6-27、图6-28、图6-29所示分别为三相定子电流仿真波形、电动机转速仿真波形以及电动机输出转矩仿真波形。由图可见,初始给定转速为500r/min,在1s时刻阶跃改变给定转速到800r/min,在1.5s时刻阶跃增大负载转矩,仿真结果表明在电动机运行稳定后,三相定子电流波形较好,改变负载转矩,系统恢复较为迅速;改变电动机给定转速,实际转速跟踪较快,系统性能良好。图6-30所示为磁链轨迹仿真图。由图可见仿真获得了圆形磁链,表明对磁链具有良好的控制,能提高系统调速精度。
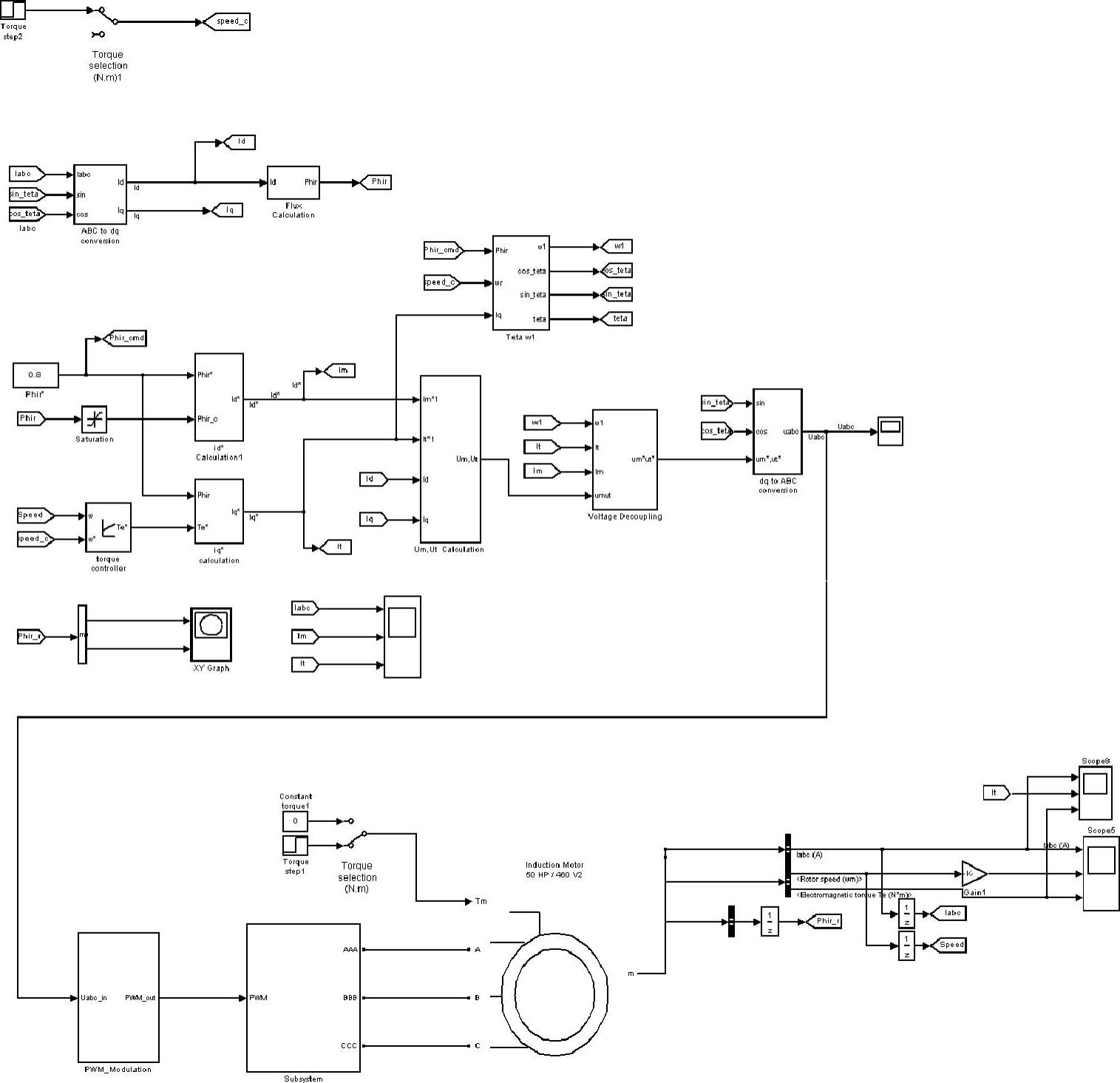
图6-24 级联型矢量控制系统仿真模型
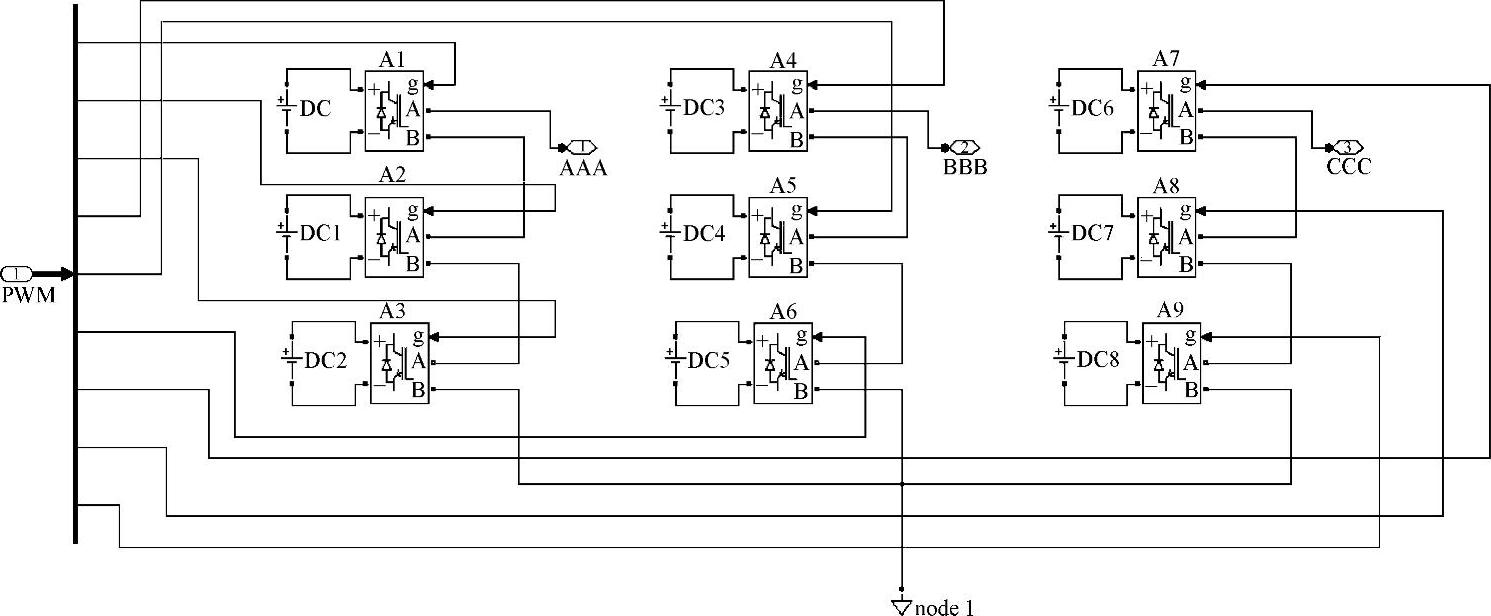
图6-25 载波移相仿真模型
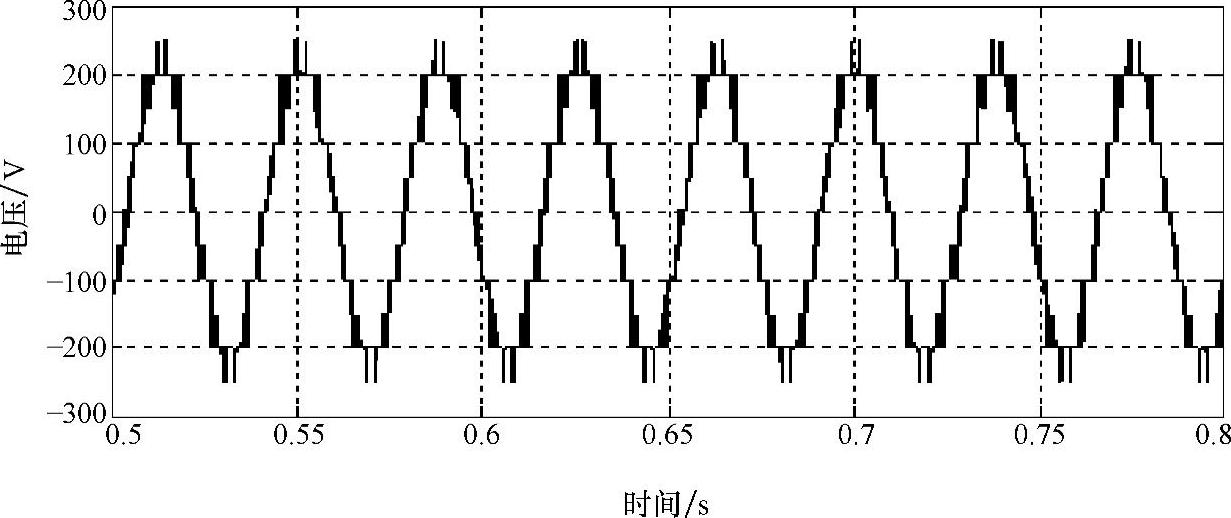
图6-26 输出到电动机定子线电压仿真波形(https://www.xing528.com)
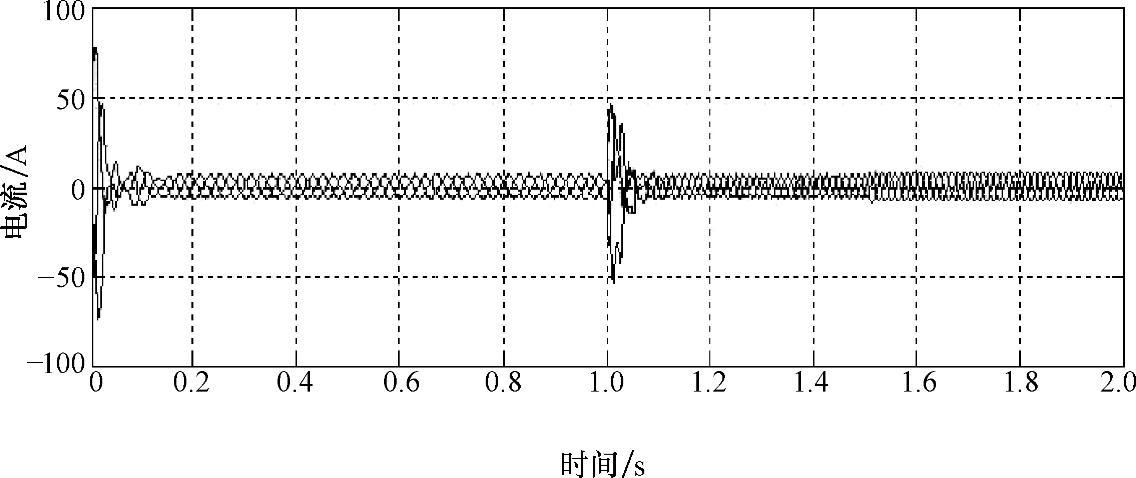
图6-27 三相定子电流仿真波形
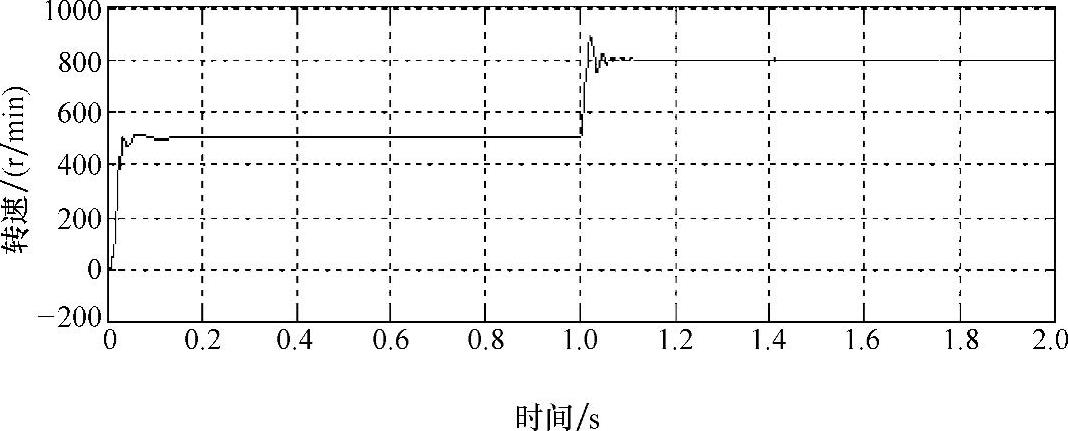
图6-28 电动机转速仿真波形
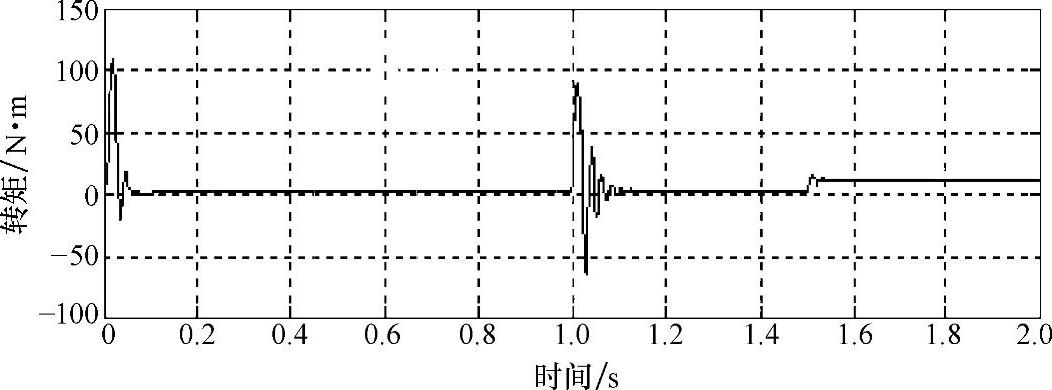
图6-29 电动机输出转矩仿真波形
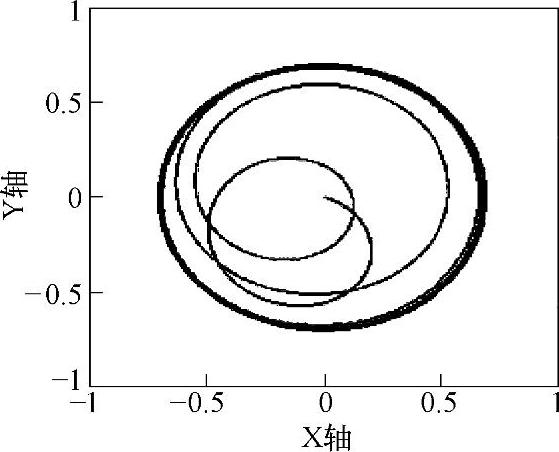
图6-30 磁链轨迹仿真图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。