



在异步电动机速度闭环控制中需要电动机转速信息,数字测速具有测速精度高、分辨能力强、受器件影响小的优点,被广泛应用于有速度传感器矢量控制中[181]。
1.M法测速
在一定的时间Tc内测取编码器输出脉冲个数M1,用以计算这段时间内的平均转速,称作M法测速(如图6-5所示)。把M1除以Tc就可得到编码器输出脉冲的频率f1=M1/Tc,所以该方法又称频率法。设电动机每转一圈共产生Z个脉冲,则电动机转速为

式中,Z为倍频系数与编码器光栅数的乘积,Tc单位为s。
在式(6-23)中,转速n正比于脉冲个数M1。高速时M1大,量化误差小,随着转速的降低误差增大,转速过低时M1小于1,此时计算出来的转速不能满足矢量控制的要求,所以M法测速只适用于高速段。

图6-5 M法测速示意图
2.T法测速
在编码器相邻两个输出脉冲时间间隔内,对已知频率f0的高频时钟信号脉冲用一个计数器进行计数,由此来计算转速的方法称作T法测速(如图6-6所示)。在T法测速中,测速时间Tt是用高频时钟脉冲个数M2计算而得,即Tt=M2/f0,则电动机转速为
 (https://www.xing528.com)
(https://www.xing528.com)
当电动机高速运行时M2较小,量化误差较大,此时计算得到的转速同样也不能满足矢量控制的要求,随着电动机转速的降低量化误差减小,所以T法测速只适用于低速段。
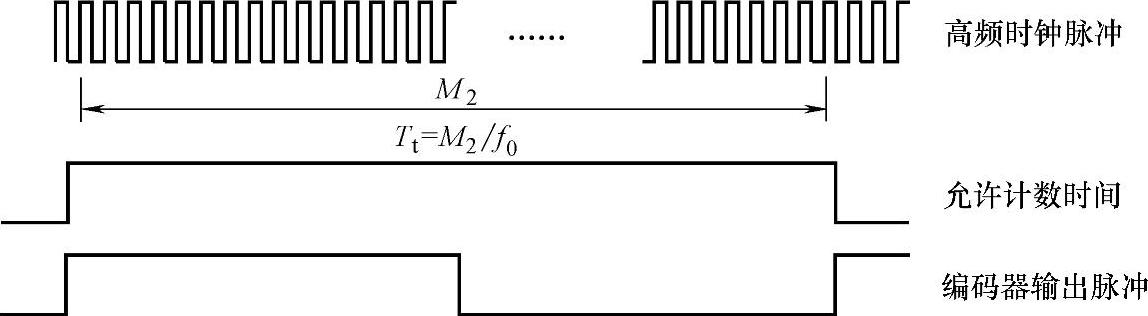
图6-6 T法测速示意图
3.M/T法测速
将M法与T法相结合起来,既检测Tc时间内编码器输出的脉冲数M1,又检测同一段时间间隔内的高频时钟脉冲个数M2,用此来计算电动机的运行转速的方法称作M/T法测速。已知频率f0的高频时钟信号脉冲,测速时间Tt=M2/f0,则电动机的转速为

采用M/T法测速时,应保证编码器输出脉冲计数器与高频时钟脉冲计数器同时打开与关闭,用以减小量化误差(如图6-7所示),只有编码器输出脉冲上升沿到达时,两个计数器才同时允许开始或停止计数。由于M/T法的计数值M1和M2都随转速的变化而变化,当电动机高速运行时,相当于M法测速,当电动机低速运行时,相当于T法测速。正因如此M/T法测速明显优于M法测速和T法测速,是目前有速度传感器矢量控制中较为广泛应用的一种测方法。
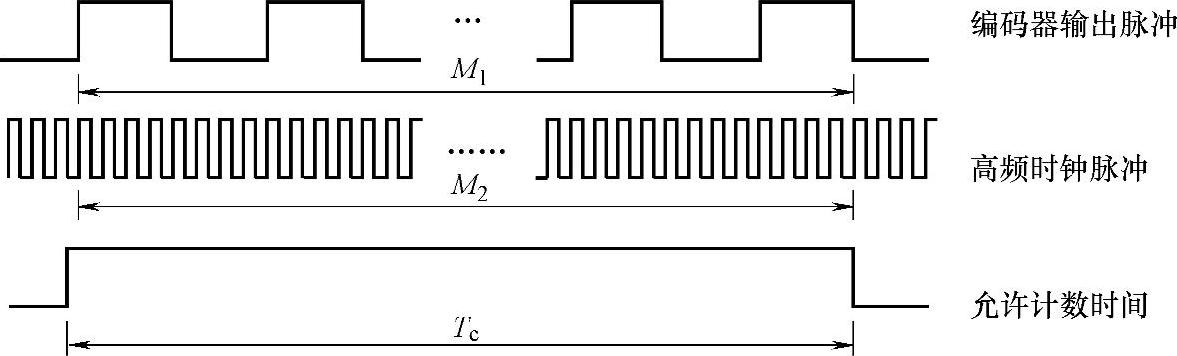
图6-7 M/T法测速示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。