



异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。为了解决异步电动机转矩控制问题,20世纪70年代德国工程师F.Blaschke首先提出了异步电动机矢量控制理论。矢量控制实现的基本思想是模仿直流电动机控制,将一台三相异步电动机等效为直流电动机,通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的,以获得能与直流调速系统相媲美的静、动态性能。
矢量控制的基本原理是[178]:将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,即控制定子电流矢量。实际的三相异步电动机矢量控制系统,是将磁链与转矩解耦,分别设计两者的调节器,以实现对交流电动机的高性能调速。
以转子磁场定向为例,矢量控制变频调速的实现方法是将异步电动机在三相坐标系下的定子电流IA、IB、IC、通过三相-二相变换(3s/2s变换),等效成两相静止坐标系下的交流电流Iα、Iβ,再通过按转子磁场定向旋转变换(2s/2r变换),等效成同步旋转坐标系下的直流电流Im、It(Im相当于直流电动机的励磁电流;It相当于与转矩成正比的转矩电流,再模仿直流电动机的控制方法,求得直流的控制量,经过相应的坐标反变换,实现对异步电动机的控制。可见,其控制实质是将交流电动机等效为直流电动机,分别对转矩、磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。
由于异步电动机的控制可选用不同基准进行,根据所选用的基准矢量不同,有三种定向方式,即定子磁场定向、转子磁场定向和气隙磁场定向[179]。
1.定子磁场定向的矢量控制
定子磁场定向的矢量控制方式是一种高性能的调速控制方式,采用该控制方式的控制系统,也称为直接转矩控制系统。该系统的特点是直接对转矩进行闭环控制,以获得很好的动态响应,图6-1所示为直接转矩控制系统框图。通过对定子磁链进行控制,系统在控制中不受转子参数的变化所带来的干扰,可以增强系统的抗干扰能力;其坐标变换较为简单,响应速度快。但在低速控制过程中会产生转矩脉动,严重时系统无法运行;同时在磁链的计算中,采用的是电压模型,因此也具有了有关电压模型的缺点。
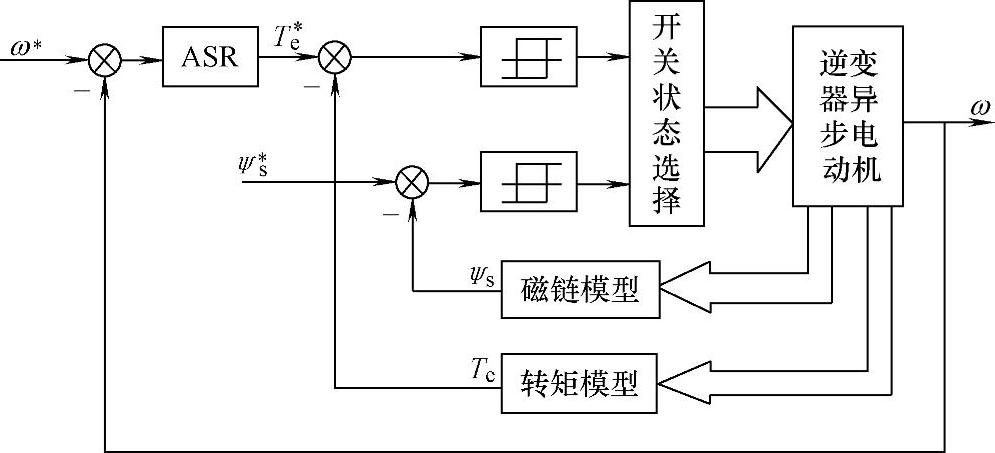
图6-1 直接转矩控制系统框图
2.气隙磁场定向的矢量控制(https://www.xing528.com)
不同于定子磁场定向方式,气隙磁场定向的矢量控制方法是将基准矢量定向在气隙磁链上。由于气隙磁场是电动机电能与机械能交换的主要媒介,以气隙磁链进行定向,控制精度无疑是最好的,但气隙磁链的确定比较困难,目前该控制方法应用较少。
3.转子磁场定向的矢量控制
转子磁场定向的矢量控制方式目前应用较普遍,且较上述两种控制方式更易于实现。将转子磁链的方向定义为m轴的方向,垂直于m轴的方向定义为t轴方向。这时,将以转子磁场进行定向时的m轴也称为d轴,t轴称为q轴。在异步电动机运行过程中假如保持励磁电流恒定,则输出的转矩仅与转矩电流成正比。该控制方法在观测磁链时,同样面对电压模型和电流模型的困扰,需要进行模型的优化才能获得较好的磁链观测。不过,它的优点是解耦了磁链与转矩,使得控制上较为接近于直流电动机的控制,实现了人们最初的设想。
矢量控制的磁链取得方法有间接及直接方法,也称间接磁场定向和直接磁场定向,它们的区别在于[180]:
①间接磁场定向
间接磁场定向的矢量控制是根据异步电动机的数学模型,及各个坐标系下的电动机方程,通过计算得到其固有关系式,引入电动机参数进行计算,估计磁链的幅值与相角,其缺点是受电动机参数的准确性影响较大,且在电动机运行过程中,电动机参数发生变化需要进行相应的调整,其优点是不需要受到特殊硬件检测设备的制约,节约成本,提高应用性。
②直接磁场定向
直接磁场定向的矢量控制是运用直接方式,获取磁链的位置、幅值,需安装磁链传感器,而在一些场合,安装磁链传感器很难做到。随着DSP不断更新升级,使在较短时间内完成运算估算磁链已越来越可行,因此直接磁链观测器越来越多地受到人们重视。其缺点是对仪器的精度要求很高,优点是基本不受转子时间常数影响。如果观测的精度足够高,那么实现矢量控制的准确度就会极为简便。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。