



前面分析了负载功率前馈加电流环PIR调节器的控制策略,从理论推导和分析,以及仿真均证明了该策略能使带单相H桥负载的三相PWM整流器处于稳态运行。负载功率前馈的主要作用是提高动态响应性能,功率前馈是一种开环的控制策略,引入的误差需要通过电压外环直流母线电压的反馈来消除。另外,负载功率前馈控制需要对功率的实时计算,这就离不开对电压和电流信号的采样,而基波电压有效值可由母线电压乘占空比获得,电流可通过电流霍尔采样取得,这无疑又增加了控制系统的成本和复杂性。如果能通过闭环控制为电流环提供给定值,对实际的功率单元系统设计将具有非常重要的意义。
1.电压环PIR调节器
图5-49所示为系统电压外环的控制框图。
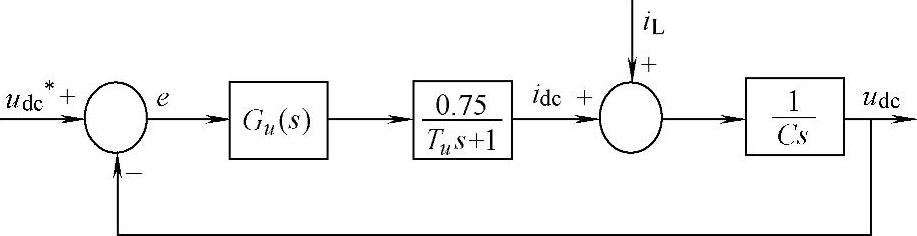
图5-49 系统电压外环控制框图
在图5-49中,Gu(s)为电压环调节器的传递函数,0.75/(Tus+1)为电压环采样小惯性环节与电流内环传递函数合并后的传递函数。
根据上述电流环PIR调节器的设计原理,要实现电压环对2ωo交流分量的无静差跟踪控制,应设计电压环调节器的传递函数为

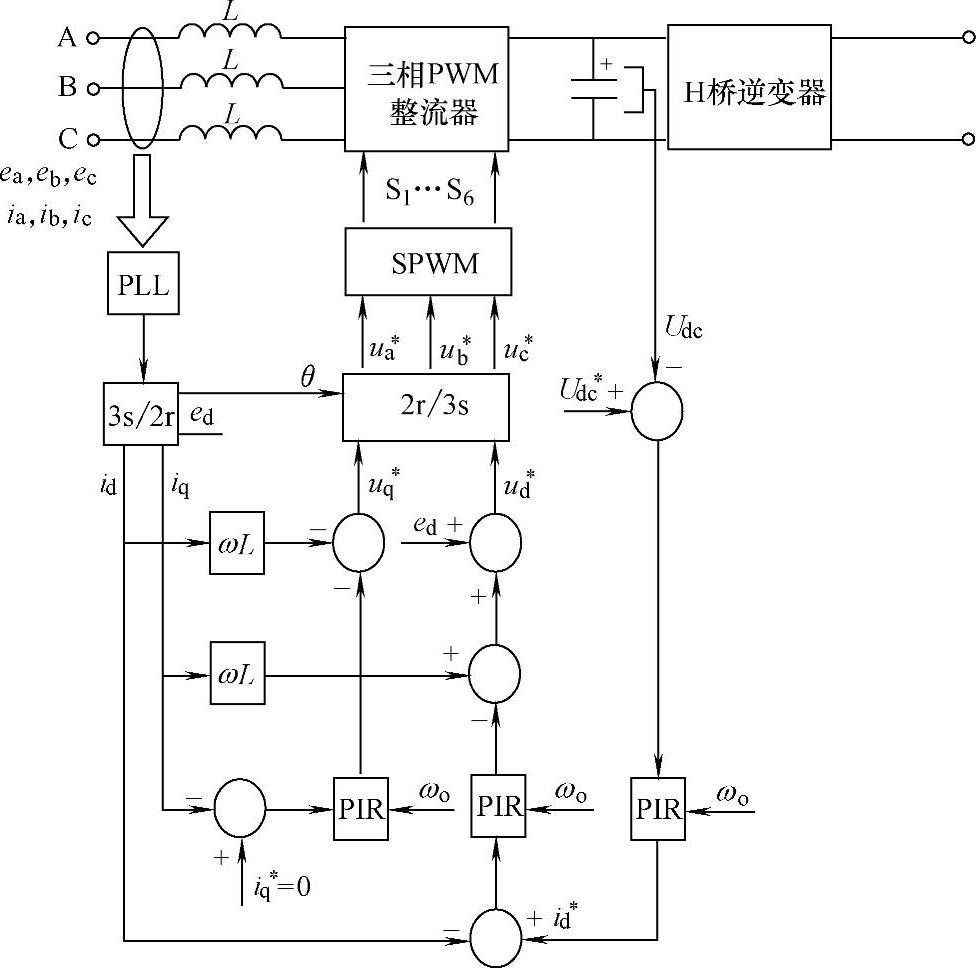
图5-50 电压环电流环PIR调节器控制框图
电压环PIR调节器的特性与电流环PIR调节器完全相同,这里不再赘述。
电压环和电流环均采用PIR调节器的控制框图如图5-50所示[177]。电压环采用PIR调节器,可实现对2ωo交流分量的无静差跟踪控制。该控制方式虽然动态响应不如负载功率前馈控制,但是在稳态时具有良好的性能,并且能够降低成本、简化控制系统。
2.仿真分析
图5-51所示为电压环电流环PIR调节器控制系统仿真模型,同样设定H桥逆变器的输出频率fo=45Hz。系统仿真参数与采用PI调节器时相同,系统仿真时间为0.5s,采用变步长离散算法。仿真波形如图5-52~图5-56所示。
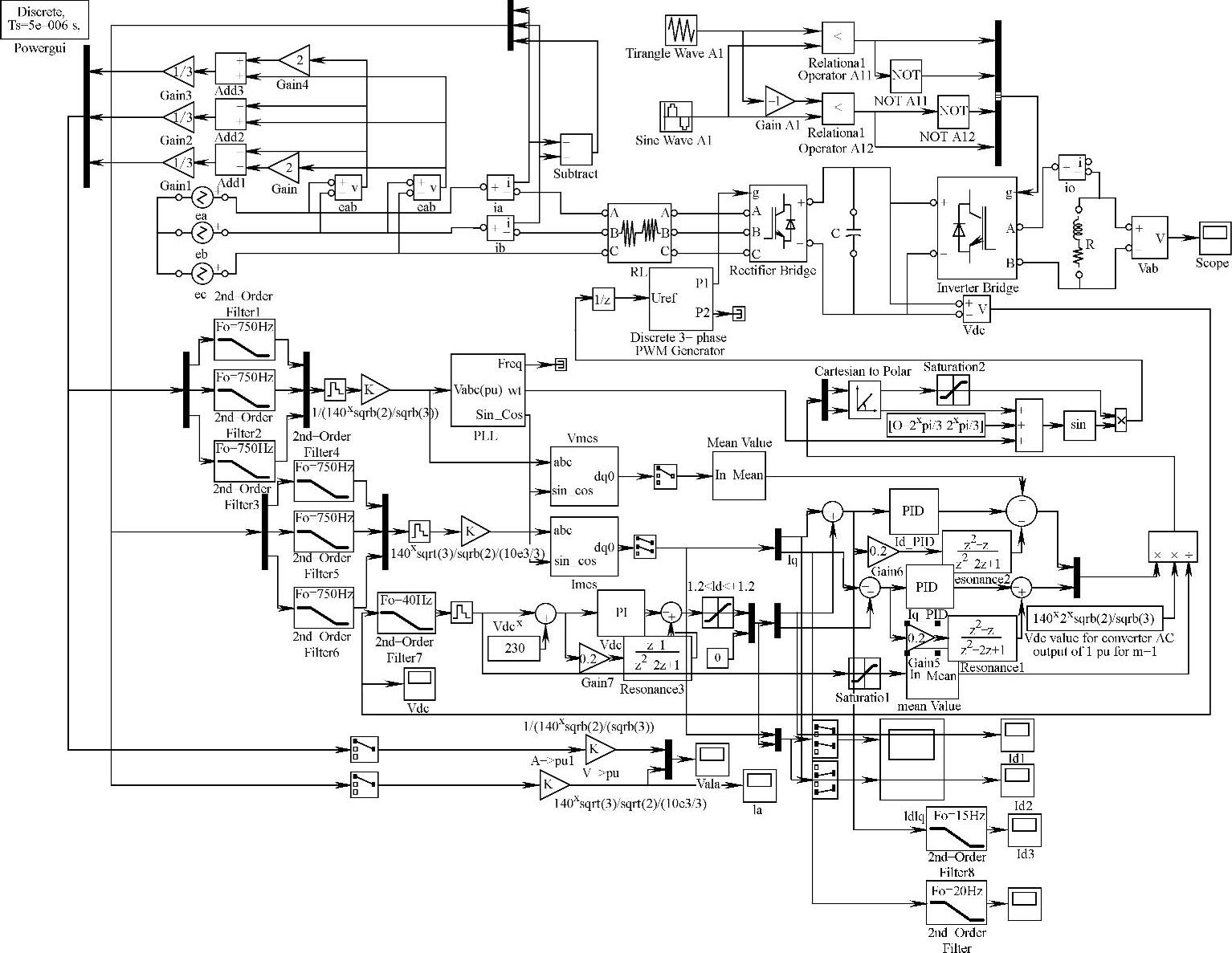
图5-51 电压环电流环PIR调节器控制的系统仿真模型(https://www.xing528.com)
图5-52所示为电压环电流环PIR调节器控制的系统直流母线电压整体与局部放大仿真波形。由图可见,直流母线电压维持在给定值230V,电压基本平稳,其波动峰峰值为1V。与采用负载功率前馈加电流环PIR调节器相比母线电压更加平稳。
图5-53所示为系统网侧相电压与相电流仿真波形。由图可见,相电压与相电流同相位,电流响应速度较快。
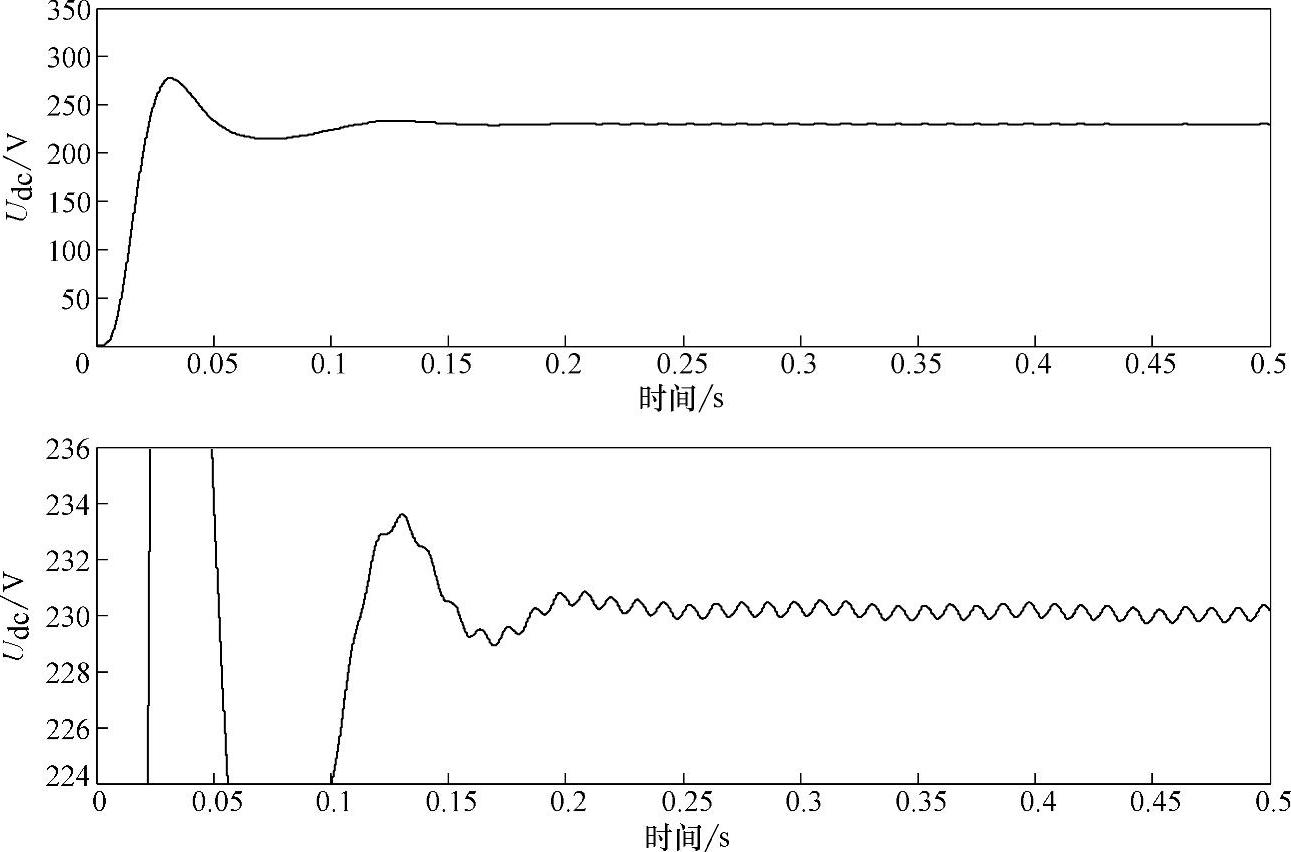
图5-52 系统的电压环电流环PIR调节器控制母线电压仿真波形
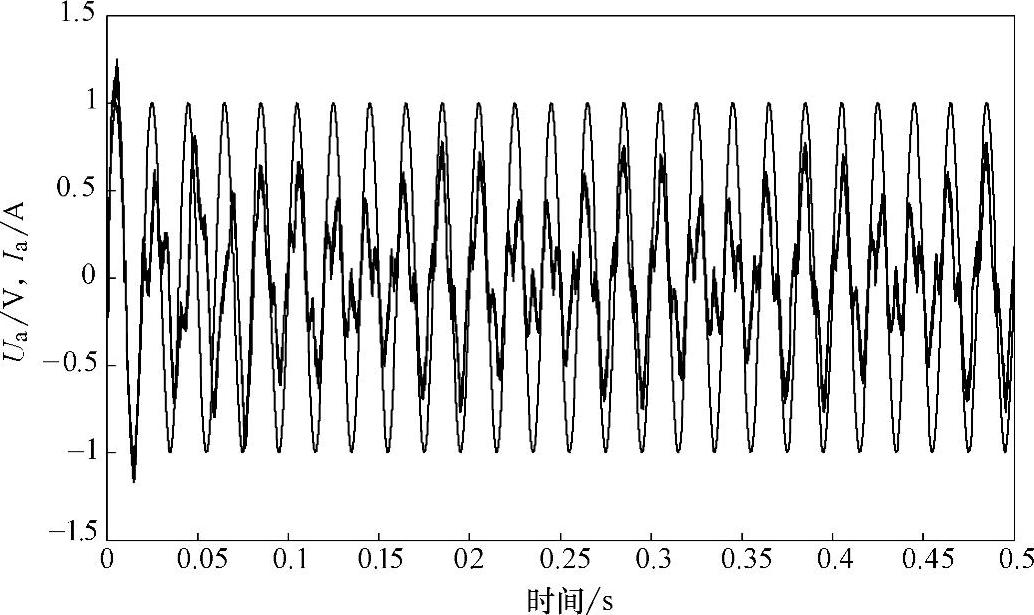
图5-53 系统的电压环电流环PIR调节器控制相电压与相电流仿真波形
图5-54所示为系统d轴电流给定值、实际值、误差值和q轴电流实际值仿真波形。从图中可发现,d轴电流误差值维持在0轴附近,基本平稳,q轴有功电流跟踪效果明显,并且q轴电流无明显的波动。
图5-55、图5-56所示分别为母线电压和网侧电流的谐波分析。由母线电压谐波分析图可见,母线电压2fo=90Hz分量谐波含量较少,与采用负载功率前馈加电流环PIR调节器控制时基本相似;网侧电流谐波分析图中2ωo-ωs=40Hz和2ωo+ωs=140Hz分量谐波含量也较采用负载功率前馈时少。
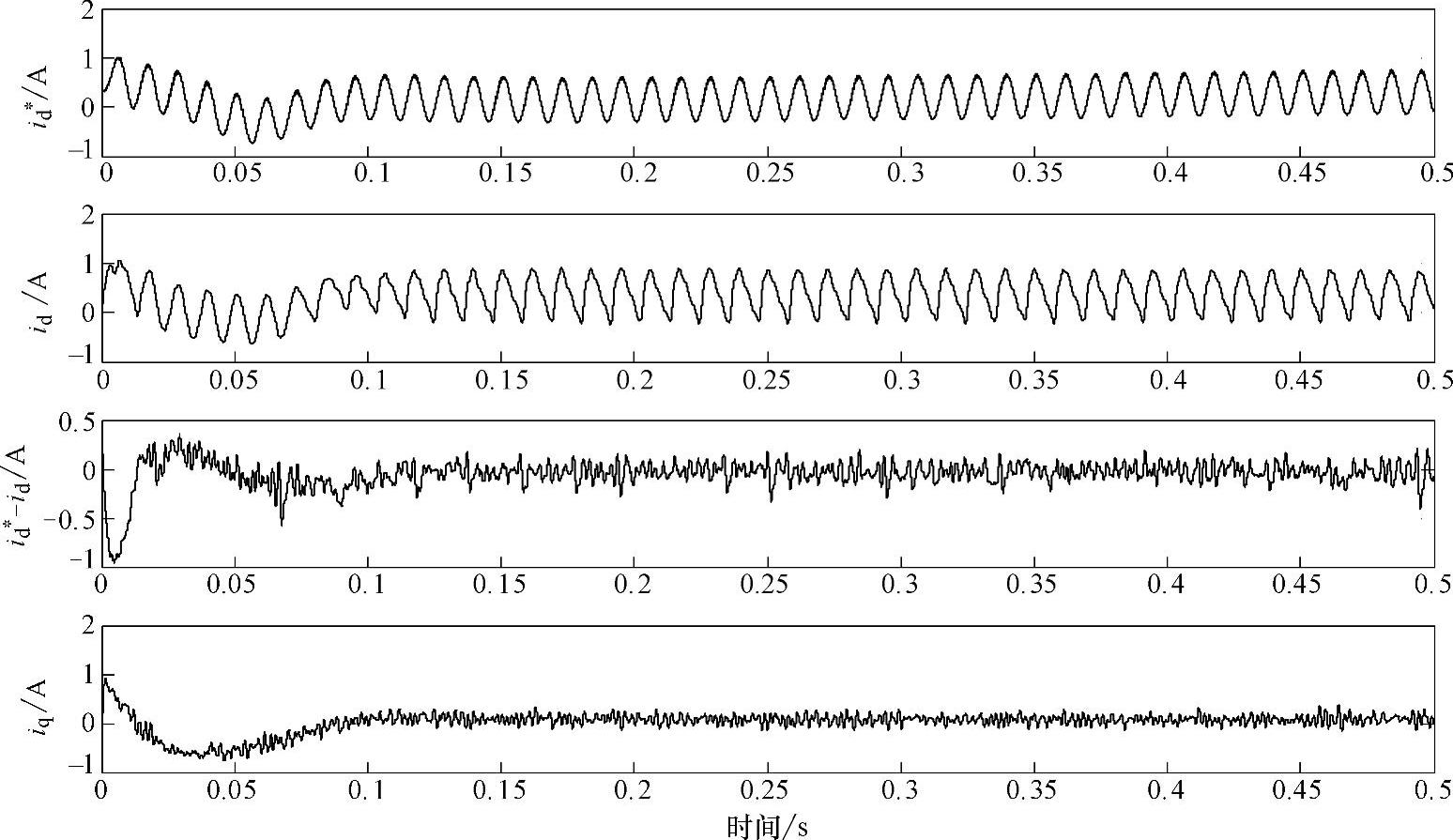
图5-54 电压环电流环PIR调节器控制有功电流与无功电流仿真波形
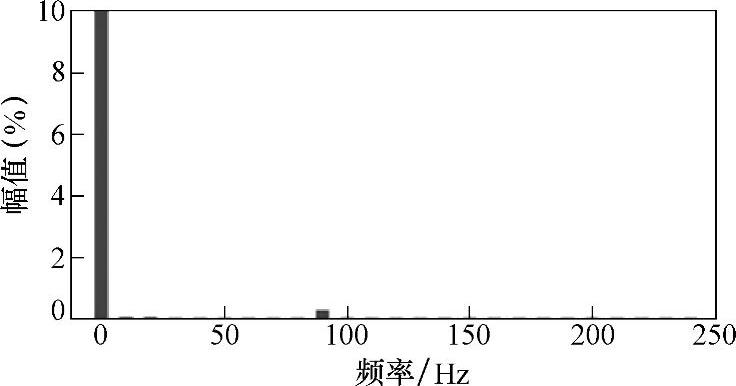
图5-55 电压环电流环PIR调节器控制母线电压谐波分析

图5-56 电压环电流环PIR调节器控制网侧a相电流谐波分析
通过以上仿真实验及相应的仿真波形可见,母线电压比较平稳,电流环能够实现无静差跟踪控制,电压环和电流环采用PIR调节器控制所取得的效果比采用负载功率前馈加电流环PIR调节器控制效果好。该控制方法不需负载功率前馈采用的电流霍尔传感器,节省了成本;其次,该控制方法只需在算法中做一些处理即可实现。因此考虑到实际系统采用负载功率前馈设计的复杂性,在实际应用中可选用电压环电流环PIR调节器控制的方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。