



如前所述,传统VOC控制策略要维持直流母线电压恒定,必须满足式(5-100)的d轴有功电流给定值。由上面的仿真实验可见,传统VOC控制策略用于带单相H桥负载的三相PWM整流器中会引起直流母线脉动;另外,由于母线电压给定值为一常量,表明式(5-100)中d轴有功电流给定值的交流分量是由直流母线实际值提供。是否可通过其他方式引入d轴有功电流给定值的交流分量,从而维持直流母线电压稳定,这就是下面要研究的负载功率前馈控制策略。
1.负载功率前馈控制策略
由于单相H桥逆变器的瞬时输出功率(参见式(5-96))中含有与式(5-100)的d轴有功电流给定值相同的交流分量,可尝试将其引入直流母线电压环,从而满足式(5-100),维持直流母线电压的恒定,这就是电压外环的负载功率前馈控制策略的思路。
如果能已知H桥逆变器输出电压uo和输出电流io的瞬时值,便可根据式(5-96)计算出其瞬时输出功率,再根据功率单元的能量守恒关系,可得到满足直流母线电压恒定的d轴有功电流给定值。在实际系统中,H桥逆变器的瞬时输出电流io可通过电流霍尔元件测量获取;但由于实际输出电压是PWM脉冲,若要得到等效的基波电压比较困难。为了解决这一问题,可采用直流母线电压udc乘以PWM脉冲的占空比do获取瞬时输出电压uo。基于单相H桥负载的三相PWM整流器的负载功率前馈控制框图如图5-35所示。
由图5-35可见,除了引入负载功率前馈外,系统还保留了电压外环,其作用是补偿PWM整流器的损耗和维持直流母线电压恒定。通过引入负载功率前馈的方法,可产生满足式(5-100)的d轴有功电流给定值。
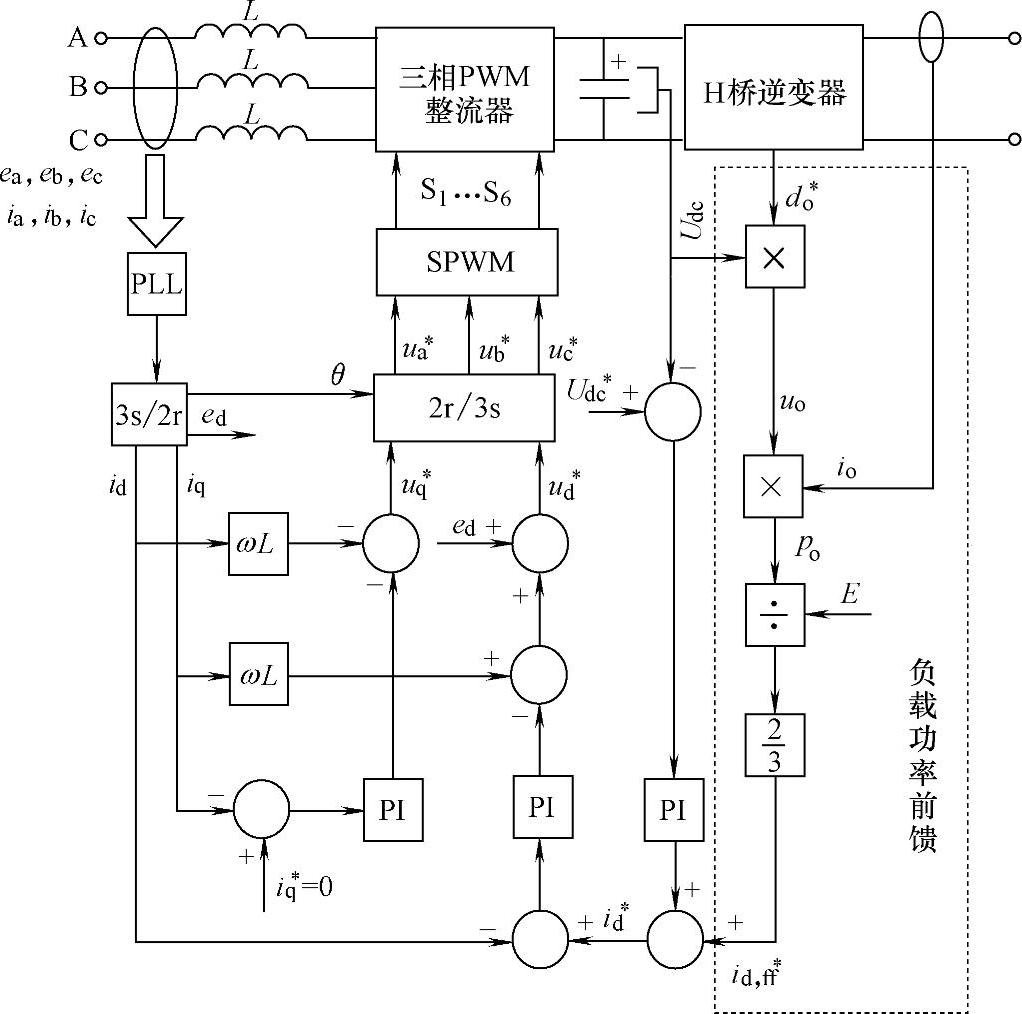
图5-35 基于单相H桥负载的三相PWM整流器负载功率前馈控制框图
2.仿真实验与分析
为了进一步验证引入负载功率前馈后系统的性能,在Matlab中建立了基于单相H桥负载的三相PWM整流器负载功率前馈仿真模型如图5-36所示。主电路参数以及功率器件开关频率都与前面介绍的传统VOC控制策略仿真相同,系统仿真时间为0.5s,采用变步长离散算法。仿真波形如图5-37~图5-41所示。
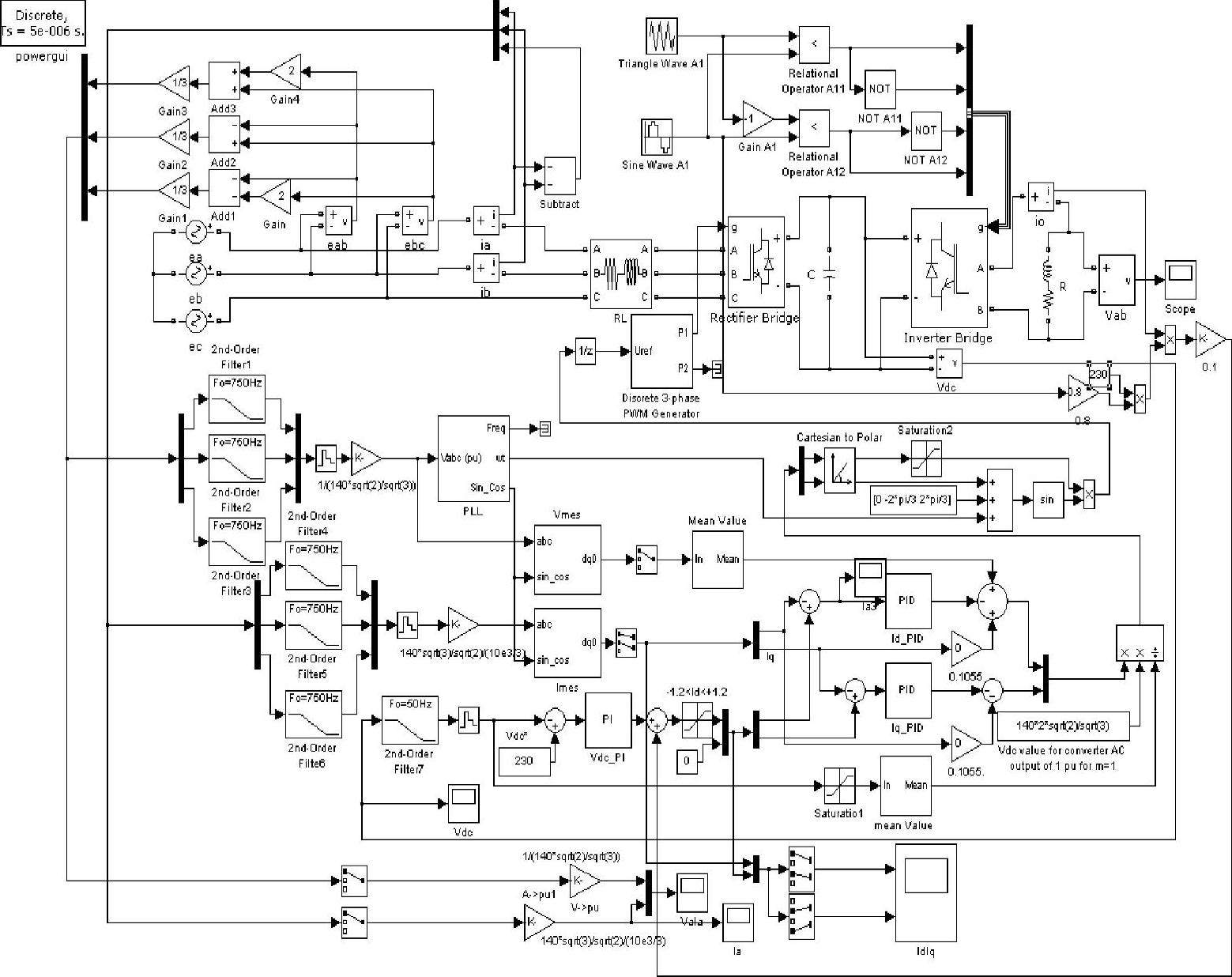
图5-36 基于单相H桥负载的三相PWM整流器负载功率前馈控制系统仿真模型
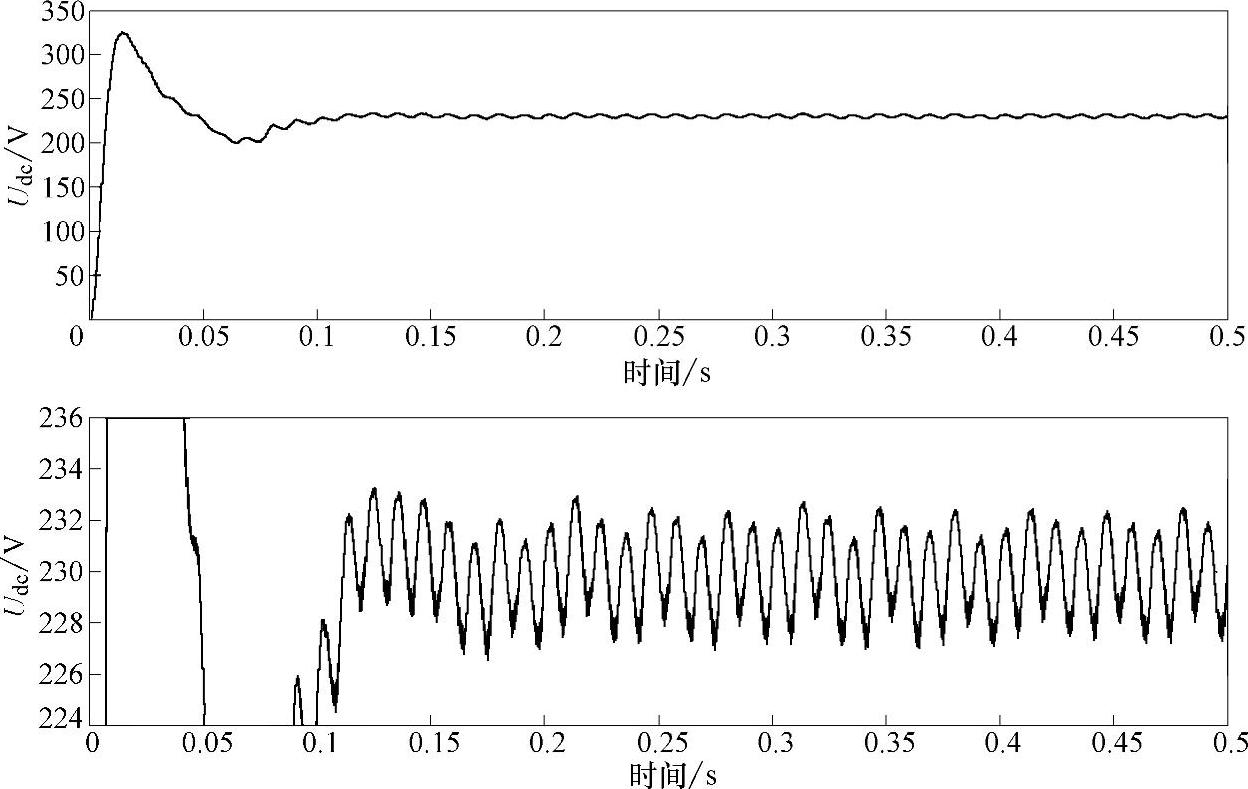
图5-37 负载功率前馈母线电压仿真波形
 (https://www.xing528.com)
(https://www.xing528.com)
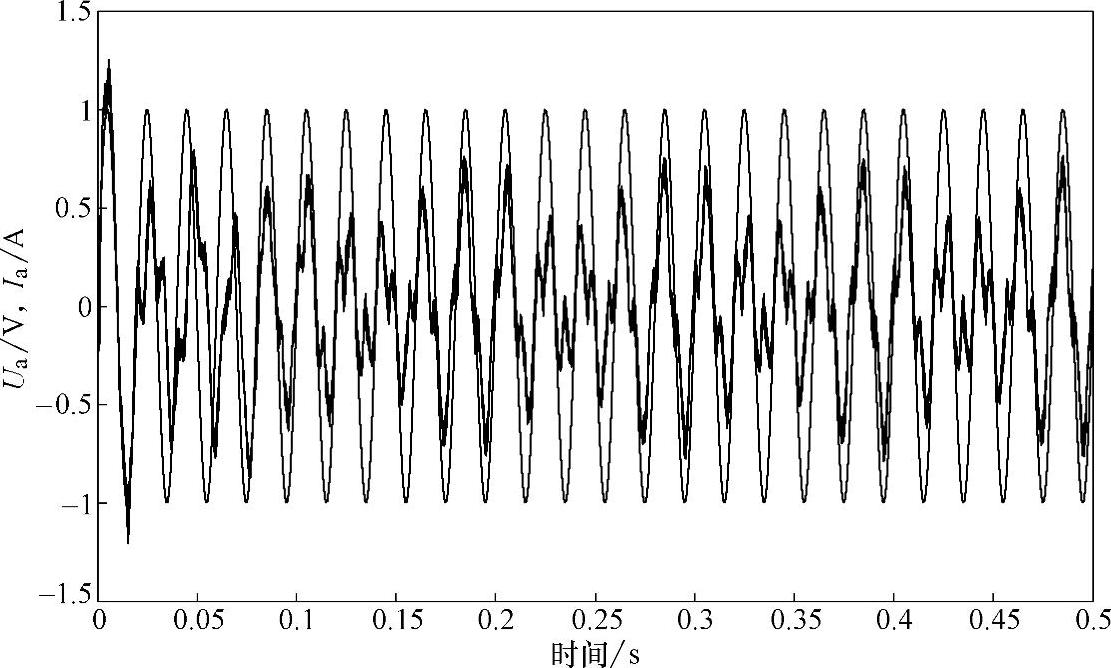
图5-38 负载功率前馈网侧相电压与相电流仿真波形
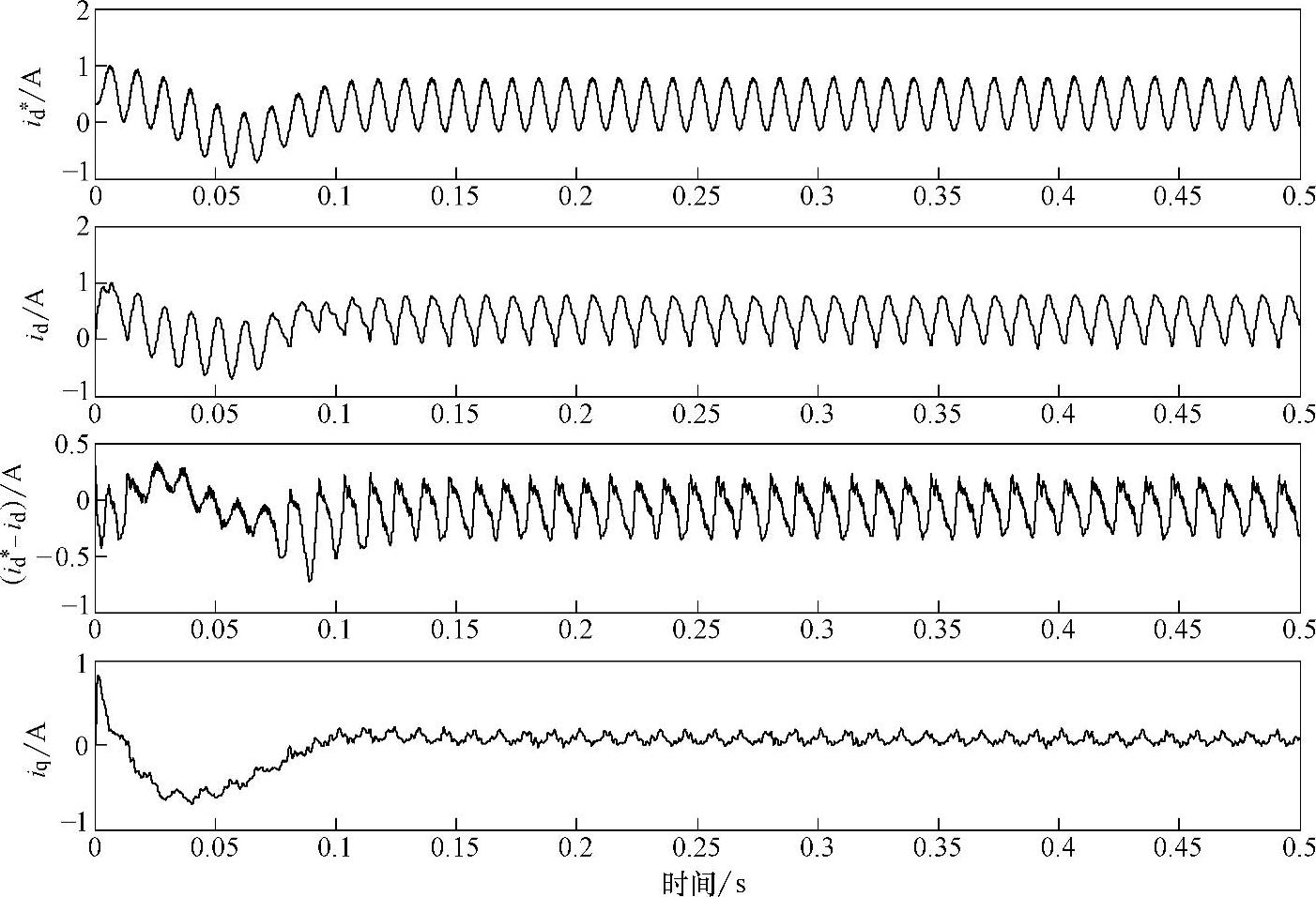
图5-39 负载功率前馈有功电流与无功电流波形
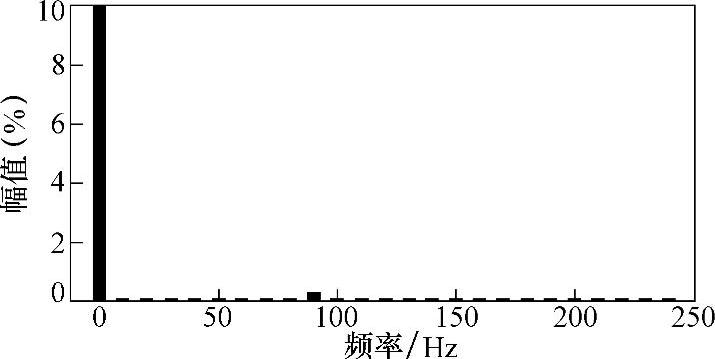
图5-40 负载功率前馈母线电压谐波分析
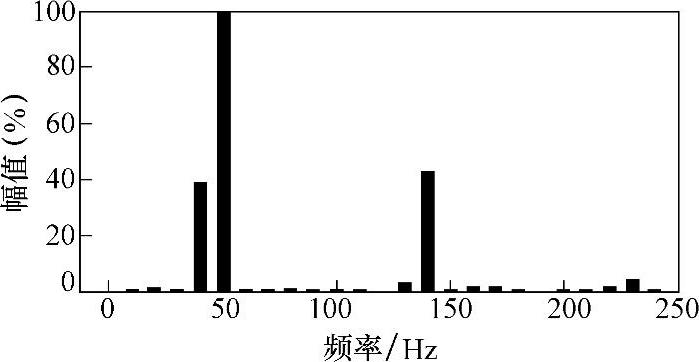
图5-41 负载功率前馈网侧相电流谐波分析
图5-37所示采用为负载功率前馈控制的母线电压仿真波形。与传统VOC控制策略相比较可见,图5-37所示母线电压的波动有明显的降低,峰峰值为4V,证明了负载功率前馈控制的有效性。
图5-38所示为采用负载功率前馈控制的网侧相电压与相电流仿真波形。将图5-38与图5-31相比较发现,加入负载功率前馈控制后,网侧相电压与相电流虽能同相,但电流波形变差,其主要原因是电流环采用PI调节器,无法实现对交流量的无静差跟踪控制。
图5-39所示为d轴电流给定值、实际值、误差值和q轴电流实际值的仿真波形。将图5-39与图5-32相比较可见,d轴电流给定值与实际值均有较大的波动,d轴电流误差值i∗d-id增大了,同时q轴电流也存在与d轴电流相同频率的波动。这是由于负载功率前馈是根据负载得到d轴有功电流给定值,该方法会使d轴有功电流给定值变化比较剧烈,又加上电流环的环宽有限,响应速度较慢,从而使d轴电流不能实现对给定值的无静差跟踪控制。在传统VOC控制策略中,d轴有功电流给定值是经过电压外环调节器获取,给定值的变化也就相对缓和,且电流内环带宽要高于电压外环的带宽,因此电流跟踪效果会比负载功率前馈好。
图5-40、图5-41所示分别为带负载功率前馈母线电压谐波分析和网侧相电流谐波分析。将图5-40与图5-33相比较可见,加入负载功率前馈后直流母线电压的两倍频2fo=90Hz的分量明显降低;将图5-41与图5-34分别相比较可见,加入负载功率前馈后网侧相电流在2fo-fs=40Hz和2fo+fs=140Hz这两个频率上的分量明显增大,从而导致网侧电流波形变差。
通过仿真实验还可看出,采用负载功率前馈后母线电压波动明显降低,主要是因为负载前馈完全补偿了输出功率的波动,使三相PWM整流桥的瞬时功率与单相H桥的瞬时功率时时平衡;同时,直流母线的稳定是以牺牲交流侧电流波形为代价的。
尽管如此,实际装置中,直流母线电压仍然会存在波动,原因主要有两个方面:其一,在计算负载功率时使用了电流采样值,会存在一定的滞后;其二,电流环采用PI调节器,对含有交流分量的给定值跟踪效果不太理想,电流误差值i∗d-id会随频率的增加而增大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。