



图10-40是FB42“CONT_S”步进控制器的框图。步进控制器没有使用位置反馈信号,上、下限位信号用于限制脉冲输出。
1.对设定值、过程变量和误差的处理
对设定值与过程变量的处理、误差的计算与处理、死区环节与FB41的完全相同。
2.PI步进算法与脉冲的生成
FB42没有使用阀门开度的实际位置反馈信号,对PI算法的积分和对模拟的位置反馈信号的积分使用同一个积分器。PI控制器的输出值与模拟的位置反馈信号比较,比较的差值送给三步元件(THREE_ST),脉冲发生器(PULSEOUT)输出驱动执行机构的脉冲。可以通过调整三步元件的阈值来降低控制器的切换频率。
脉冲发生器PULSEOUT通过最小脉冲时间PULSE_TM和最小断开时间BREAK_TM,来减小执行机构的磨损。输出脉冲QLMNUP或QLMNDN的宽度大于最小脉冲时间,两个脉冲之间断开的时间大于最小断开时间。
3.手动模式(https://www.xing528.com)
LMNS_ON为1时,系统处于手动模式,三步元件后面的两个开关切换到上面标有“1”的触点的位置,此时开关量输出信号QLMNUP和QLMNDN受手动输入信号LMNUP(控制信号增大)和LMNDN(控制信号减小)的控制。LMNS_ON为0时控制开关返回自动模式,手动与自动的切换过程是平滑的(阀门的开度不会跳变)。
4.控制阀的极限位置保护
控制阀全开时,上限位置开关动作,LMNR_HS信号为1,通过图10-40中上面的两个与门封锁输出量QLMNUP,使伺服电动机停止开阀。控制阀全关时,下限位置开关动作,LMNR_LS为1,通过下面的两个与门封锁输出量QLMNDN,使伺服电动机停止关阀。
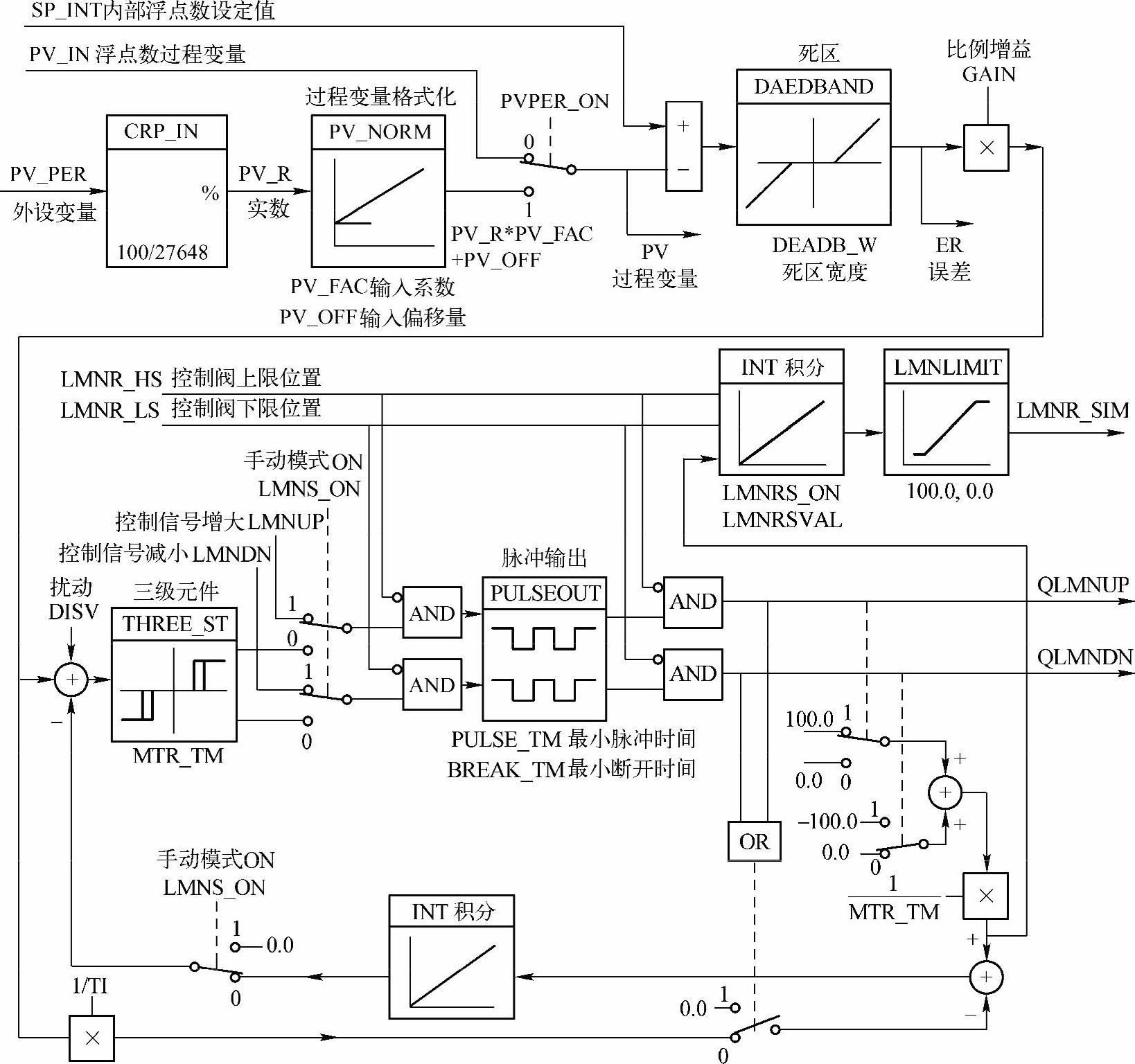
图10-40 FB42“CONT_S”框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。