



1.三步控制
三步控制用两个开关量输出信号QPOS_P和QNEG_P产生两路性质相反的脉冲信号,将它们送给积分式执行机构,例如通过伺服电动机的正转和反转来调节阀门开度的增大和减小。表10-4给出了用三步控制来控制温度的例子。
表10-4 温度控制输出信号的状态

将单位为%的输入变量INV与周期时间PER_TM相乘,得到脉冲的宽度:
脉冲宽度=INV×PER_TM/100 (10-4)图10-30给出了比率系数RATIOFAC为1的三步控制器的对称曲线。
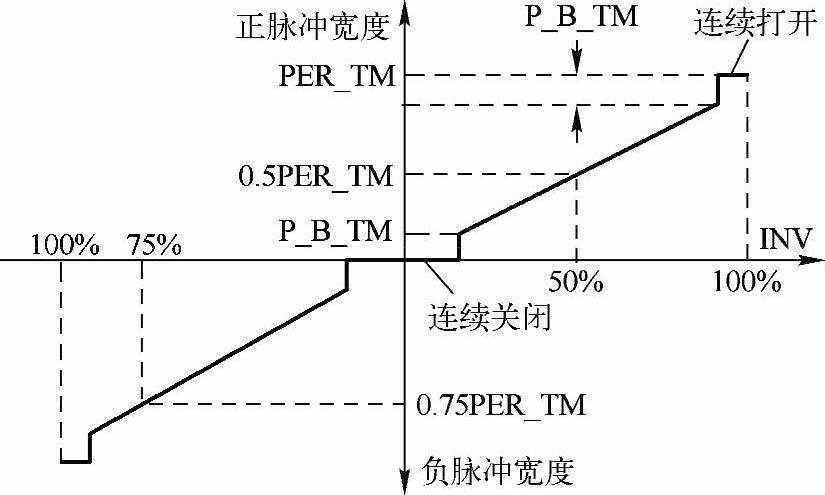
图10-30 三步控制器的对称曲线
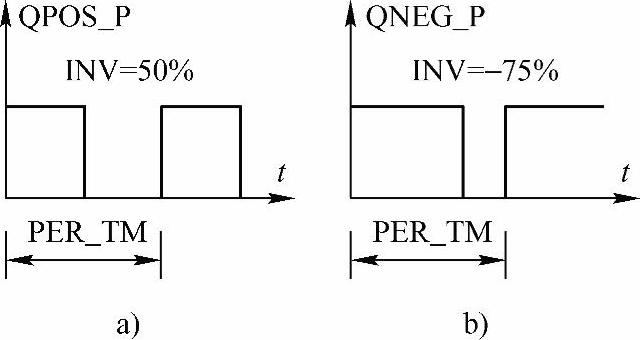
图10-31 三步控制器输出的脉冲
CPU根据输入变量INV的大小,通过特性曲线来计算脉冲宽度。由图10-30可知,INV大于0时,通过开关量QPOS_P输出正脉冲(见图10-31);小于0时,通过开关量QNEG_P输出负脉冲,脉冲的宽度与INV的绝对值成正比。
这里的正、负只是指两种脉冲的物理意义相反,不是指脉冲电平的正负。用三步控制器来控制电动调节阀的开度时,正脉冲使调节阀的伺服电动机正转,阀的开度增大。负脉冲使调节阀的伺服电动机反转,阀的开度减小。脉冲的宽度与阀门开度的增量成正比。
2.最小脉冲与最小中断时间
正确设置最小脉冲/最小中断时间P_B_TM,可以减少开关元件的动作次数,提高执行机构的使用寿命。
如果输入变量LMN的绝对值很小,按式(10-4)计算出的脉冲宽度小于P_B_TM,将不输出脉冲(见图10-30中曲线的“连续关闭”部分),类似于FB41的死区功能。
如果LMN的绝对值接近100%,按式(10-4)计算出的脉冲宽度大于PER_TM与P_B_TM的差值,脉冲几乎连成一片。此时的脉冲宽度等于脉冲周期PER_TM,即连续输出脉冲(见图10-30中曲线的“连续打开”部分)。
3.三步控制器仿真程序
例程“PID_FB43”中的闭环控制系统由PID连续控制器FB41、脉冲发生器FB43、模拟电动调节阀的双向积分器和模拟被控对象的FB100组成(见图10-32)。

图10-32 三步控制器闭环仿真系统的结构
电动调节阀是典型的积分型执行机构,它的两个开关量输入脉冲信号用来控制电动阀的伺服电动机的正转和反转,使调节阀的开度(即阀门阀芯的位置)增大或减小。
(1)OB1与OB100
与项目“PID控制”相同,OB1中的T8和T9组成振荡电路(见图10-16),产生方波给定信号。设定值SP_INT的幅度为20.0%和70.0%,周期为100s。具体的程序见随书光盘中的项目“PID_FB43”。
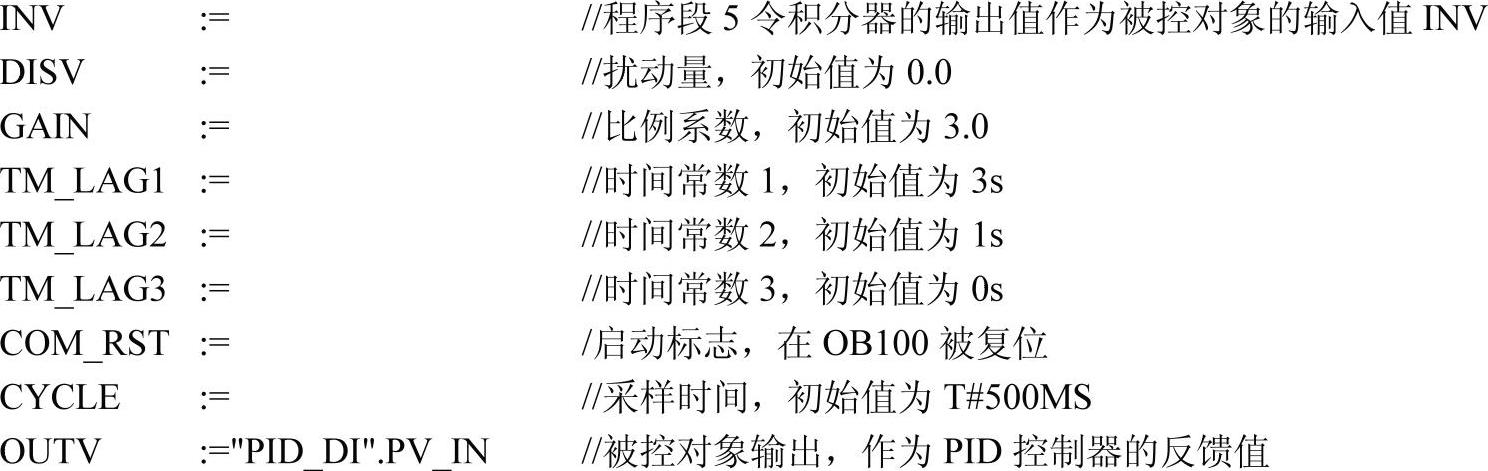
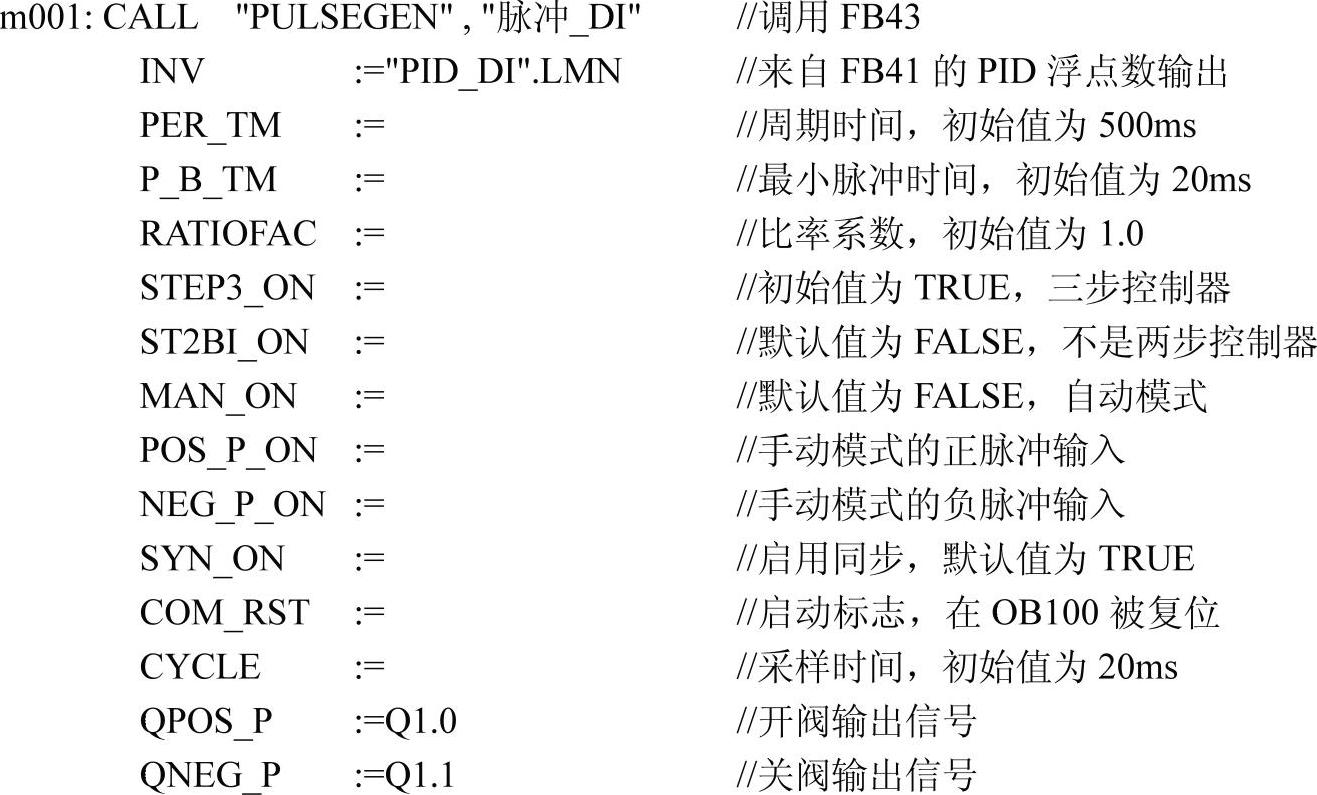
在OB100中调用FB100、FB41和FB43,完成了下列操作:
1)令各FB的起动标志COM_RST为TRUE,将它们的内部参数复位为默认值。
2)设置FB41和FB100的采样时间CYCLE和FB43的PER_TM周期为500ms。
3)设置被控对象(FB100)的增益和时间常数,被控对象的传递函数为3/[(3s+1)(s+1)]。
4)设置PID控制器的参数GAIN、TI和TD的初始值。控制器输出的上限值为100.0%,下限值为默认的-100.0%。设置微分延迟时间TM_LAG为T#0MS。
5)设置FB43的采样时间CYCLE和最小脉冲时间P_B_TM均为20ms,比率系数RACIOFAC为1.0,STEP3_ON为TURE(三步控制器)。
6)在退出OB100之前,将3个FB的起动标志位COM_RST复位。
(2)OB35中的程序
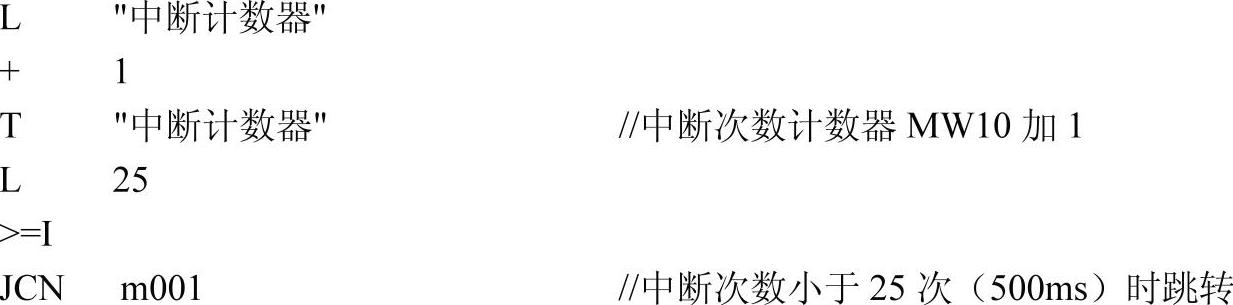
在硬件组态工具中设置OB35的循环执行周期为20ms。每20ms调用一次OB35,将“中断计数器”MW10加1,中断次数小于25时跳转到程序段4的标号m001处,执行一次FB43和模拟电动调节阀的双向积分器程序。
经过500ms后,中断次数等于25,不再跳转,“中断计数器”被清零。此时除了执行FB43,还要执行程序段2、3中的FB100和FB41。调用FB41的程序与项目“PID控制”的基本上相同,其区别在于控制器的输出不是直接送给被控对象FB100,而是送给FB43的输入变量INV。FB43分别用Q1.0和Q1.1输出开阀的正脉冲和关阀的负脉冲。程序段5用数字双向积分器来模拟电动调节阀,积分器的输出值为被控对象的输入信号INV(见图10-32)。如果Q1.0和Q1.1均为0,数字双向积分器的输出值不变。
假设连续开阀时(FB43的输入INV恒为100%),从全关到全开需要10s,平均每20ms阀门开度变化量为0.2%。因此在Q1.0为1时将积分器的输出加0.2;在Q1.1为1时将积分器的输出减0.2。下面是OB35的程序。
程序段1:(https://www.xing528.com)
程序段2:调用被控对象仿真程序FB100,每500ms执行一次程序段2~4

程序段3:调用连续PID控制器FB41,见例程“PID控制”

程序段4:每20ms中断时调用一次FB43
程序段5:用于模拟电动调节阀的双向积分器
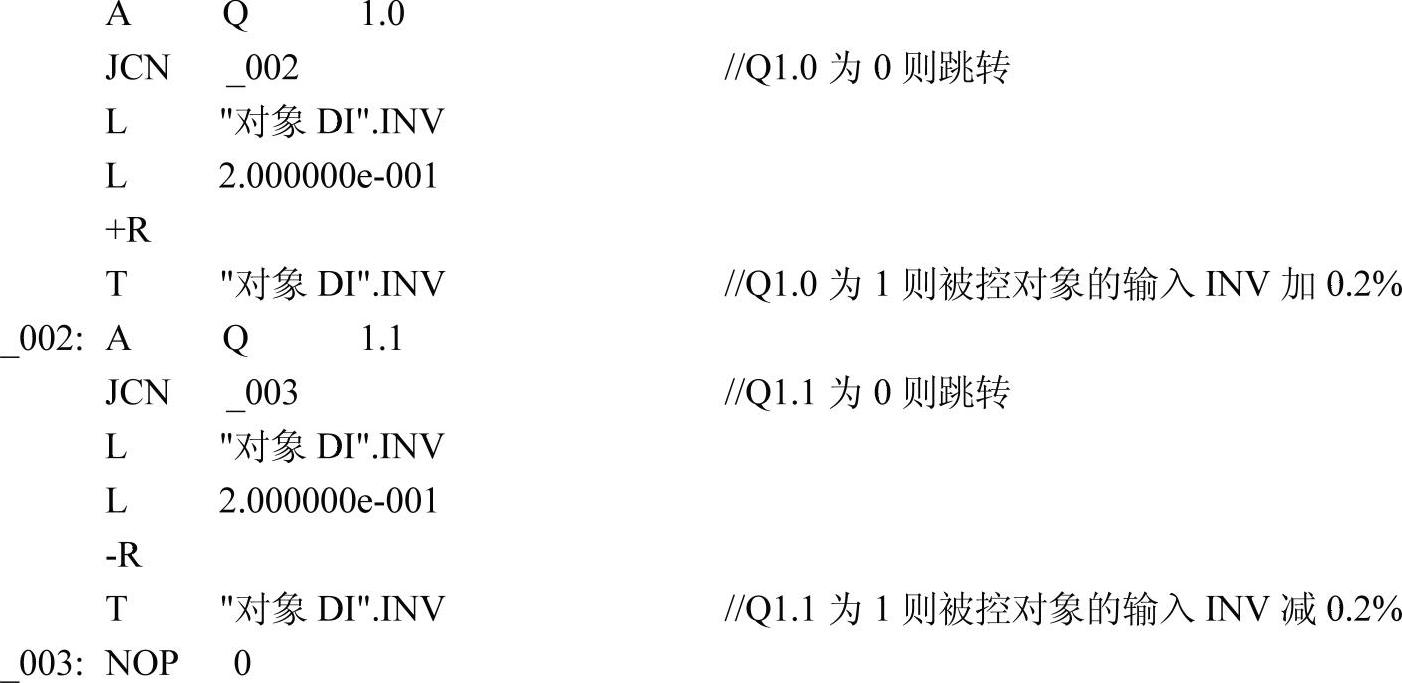
图10-33是经过反复调试后得到的较好的响应曲线,PID参数如下:增益为1.1,积分时间为35s,微分时间为3.5s,FB43的脉冲输出周期为500ms。
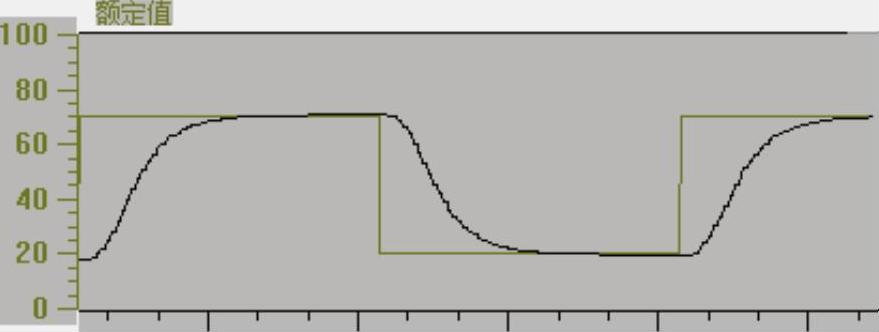
图10-33 三步PID控制器阶跃响应曲线
4.比率系数<1的三步控制器
使用比率系数RATIOFAC,可以改变正脉冲宽度和负脉冲宽度之比。例如可以将不同的时间常数用于热处理的电加热执行机构和水冷却执行机构。比率系数小于1时脉冲宽度的计算公式为
正脉冲宽度=INV×PE R_TM/100 (10-5a)
负脉冲宽度=INV×PER_TM×RATIOFAC/100 (10-5b)
由式(10-5)可知,小于1的比率系数将会减小负脉冲输出的脉冲宽度。图10-34是比率系数为0.5的三步控制器的不对称曲线。
5.比率系数>1的三步控制器
比率系数>1时脉冲宽度的计算公式为
正脉冲宽度=INV×PER_TM/(100×RATIOFAC) (10-6a)
负脉冲宽度=INV×PER_TM/100 (10-6b)
由式(10-6)可知,当RATIOFAC>1时,正脉冲输出的脉冲宽度将会变窄。
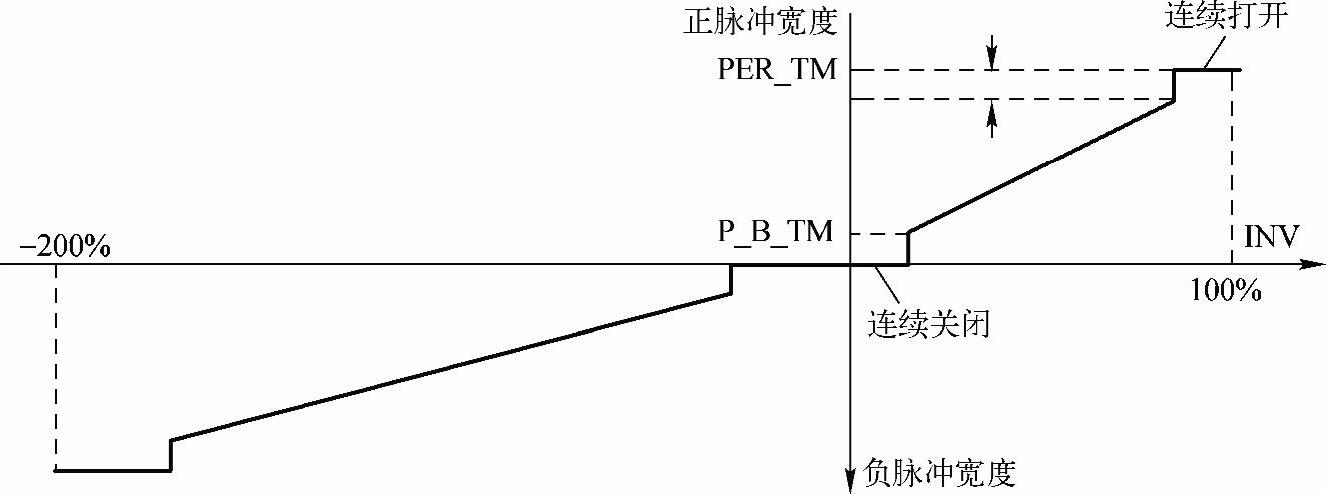
图10-34 三步控制器的不对称曲线
6.两步控制器
两步控制器用一个开关量产生两种相反状态的脉冲控制信号。典型控制为用一个输出位输出的脉冲宽度调制信号对电加热系统的控制。
两步控制器只用FB43的正脉冲输出QPOS_P控制I/O执行机构。按控制值INV的变化范围,两步控制器分为双极性控制器和单极性控制器(见图10-35和图10-36)。如果控制器的执行脉冲需要逻辑状态相反的开关量信号,可以用QNEG_P输出负的输出信号(见表10-5)。
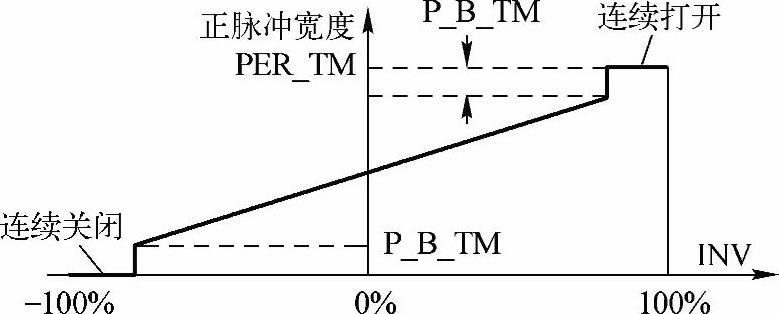
图10-35 双极性两步控制器
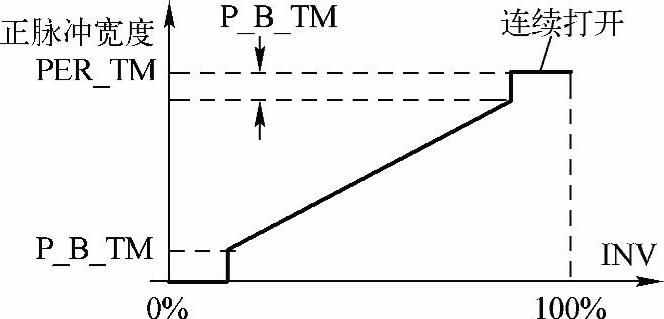
图10-36 单极性两步控制器
表10-5 两个输出量的两步控制

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。