



1.发那科系统的柔性攻螺纹指令
发那科新、老系统的柔性攻螺纹指令略有不同。这里只介绍0i-MA系统的柔性攻螺纹指令。先介绍0i-MA系统的柔性攻螺纹循环指令G84。
G84指令格式为:
G00 Xa Ya Za;
M03 Ss;
G84 Xb Yb Zz底Rz起PpFf Kk;
其中,X、Y是螺纹孔中心位置的坐标数据;Z是攻螺纹底面的Z坐标值;R是R点所在起始平面的Z坐标值;P是丝锥在攻螺纹底面的暂停时间(ms);F是丝锥的进给速度;K是攻螺纹重复次数,攻一次时可省略。
图4-14所示为发那科0i-MA系统的柔性攻螺纹循环指令的动作示意。在G98状态下,执行G84指令结束时丝锥退回到初始平面,如图4-14a所示。在G99状态下,执行G84指令结束时丝锥退回到起始平面(R点),如图4-14b所示。
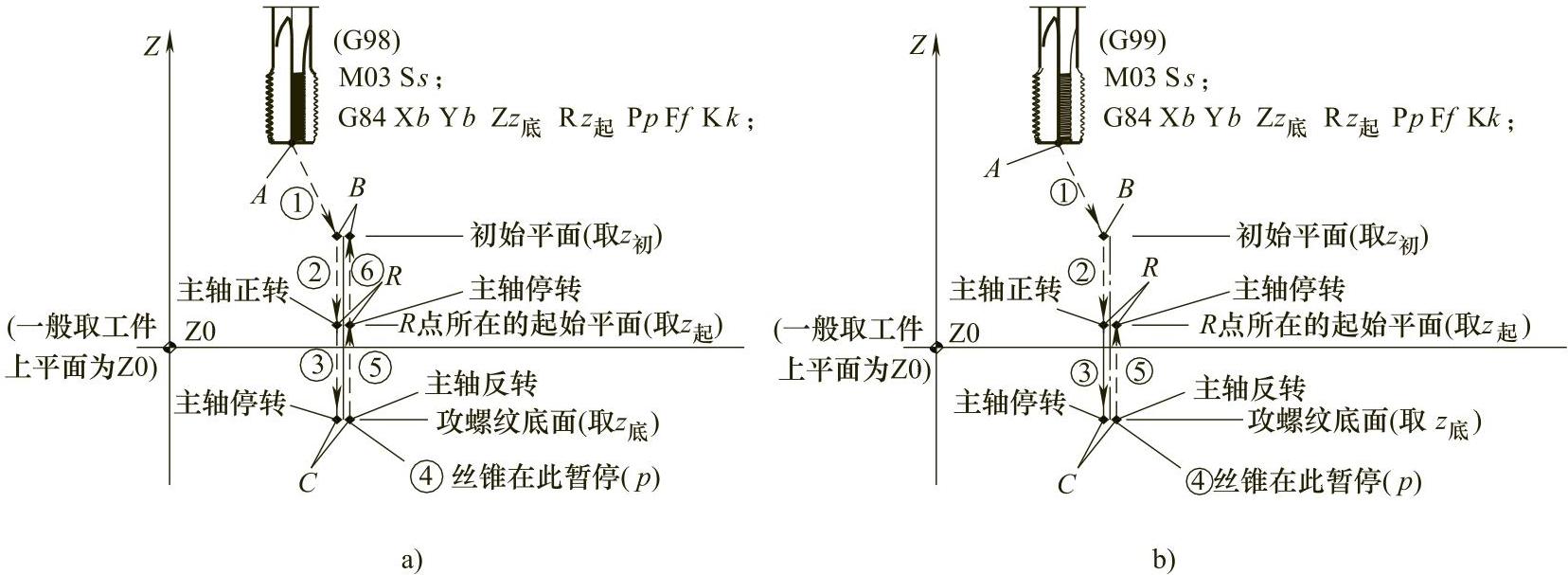
图4-14 发那科0i-MA系统的柔性攻螺纹指令G84动作示意
a)G98状态下 b)G99状态下
在G98状态下攻一个螺纹孔,主轴为每转进给,基本程序O401如下:
O401;
N1 G54 G90 G95 G98 G00 X0 Y0 Z_;
N2 G43 H_Za;
N3 Ss M03;
N4 G84 Xb Yb Zz底Rz起Pp Ff Kk;
N5 G80;
N6 G49 G00 Z_;
N7 X0 Y0 M05;
N8 M30;
执行N4段即G84指令时有如下6个动作:
①快速到达初始点B。
②快速到达起始点R。
③主轴正转,攻螺纹到孔底面点C。
④在底面处暂停p毫秒。
⑤主轴反转,丝锥退到起始点R。
⑥主轴停转,丝锥快速抬到初始点B。
在G98状态下攻一个螺纹孔,主轴为每分钟进给,基本程序O402如下:
O402;
N1 G54 G90 G94 G98 G00 X0 Y0 Z_;
N2 G43 HZ_a;
N3 Ss M03;
N4 G84 Xb Yb Zz底Rz起Pp Ff Kk;
N5 G80;
N6 G49 G00 Z_;
N7 X0 Y0 M05;
N8 M30;
在此程序中,N4段内f与N3段内s的关系为
f=螺距×s
执行N4段即G84指令段的6个动作与执行O401程序中N4段的动作相同。
2.西门子系统的柔性攻螺纹指令
西门子系统的柔性攻螺纹指令分为单动指令和循环指令。
(1)802D系统的柔性攻螺纹指令G63 G63是柔性攻螺纹的单动指令,使用时连续指令两段:一段用于攻螺纹,另一段用于回退。在XY平面定位到指定位置和指令主轴转速后,指令如下程序段:
G00Z_;下降到攻螺纹起始位
G63 Z_F_M03/04;攻螺纹,攻右旋螺纹用M03;攻左旋螺纹用M04
G63 Z_M04/03;右旋螺纹回退用M04;左旋螺纹回退用M03
图4-15所示为用G63指令攻M16螺纹,PP403.MPF程序如下:
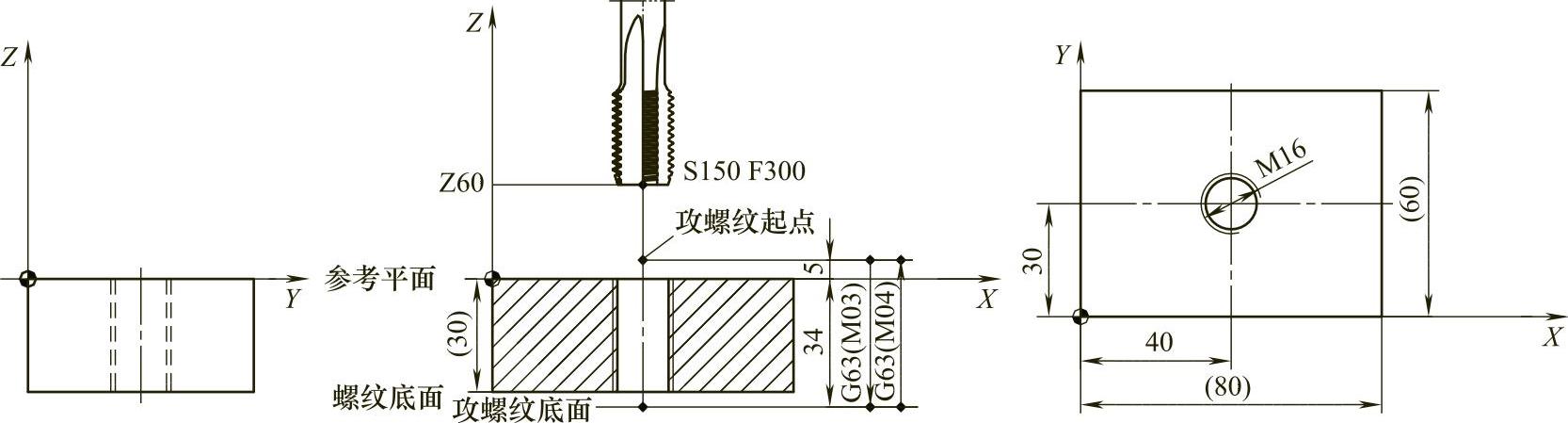
图4-15 用802D系统的柔性攻螺纹指令G63攻M16螺纹
PP403.MPF(https://www.xing528.com)
N01 G54 G90 G00 X0 Y0 Z100 S150 M03
N02 T1 D1
N03 G17 X40 Y30 Z60
N04 Z5
N05 G6 3Z-34 F300
N06 G63 Z5 M04
N07 G00 Z100
N08 X0 Y0 M05
N09 M02
执行N05段是攻螺纹,执行N06段是回退。M16螺纹的螺距是2mm,所以当主轴转速取150r/min时,进给速度就必须取300mm/min,即这两个指令数据必须成1∶2的关系。如果攻左旋螺纹,N01段中应使用M04指令,N06段中用M03指令。当然,攻左旋螺纹用的是左旋丝锥。
(2)西门子802D系统的柔性攻螺纹循环指令CYCLE840 它的指令格式为:
CYCLE840(RTP,RFP,SDIS,DP,DPR,DTB,SDR,SDAC,ENC,MPIT,PIT)
该循环指令括弧内的11个参数的含意分别为:
RTP:返回平面的Z坐标值。
RFP:参考平面即螺纹顶面的Z坐标值。
SDIS:安全平面与参考平面间的距离,即安全间隙,恒为正值。
DP:攻螺纹底面的Z坐标值。
DPR:攻螺纹底面与参考平面间的距离,恒为正值。
DTB:在攻螺纹底面的停顿时间(s)。
SDR:退回时的旋转方向。自动颠倒用0;M03用3;M04用4。
SDAC:循环结束后的旋转方向。M03用3;M04用4;M05用5。
ENC:是否带编码器攻螺纹代号。不带编码器攻螺纹用1;带有编码器攻螺纹用0。
MPIT:用螺纹尺寸指令粗牙螺纹的螺距。M03用3,M48用48。指令范围为3~48。
PIT:用数值指令螺距。指令范围为0.001~2000.000mm。
以上部分参数的含义如图4-16所示。
CYCLE840指令分为两种:一种用于无编码器攻螺纹,另一种用于有编码器攻螺纹。两种指令执行时的动作都分5步(见图4-16),执行过程只有一点不同:无编码器攻螺纹时②步和④步的准备功能是G63,而有编码器攻螺纹时②步和④步的准备功能是G33。
两种指令的编程方法略有不同。区别之一是第九个参数ENC有编码器时指令为“0”,无编码器时指令为“1”(在配备编码器的机床上柔性攻螺纹时也可以不用编码器)。区别之二是第6个参数DTB只有在无编码器攻螺纹时才生效,所以在有编码器攻螺纹时此参数位应为空(不指令)。
图4-17所示为用802D系统的CYCLE840指令攻螺纹孔的例子,螺纹尺寸是M16,螺距是2mm。
在攻螺纹底面停顿1s,无编码器攻螺纹,PP404.MPF程序如下:
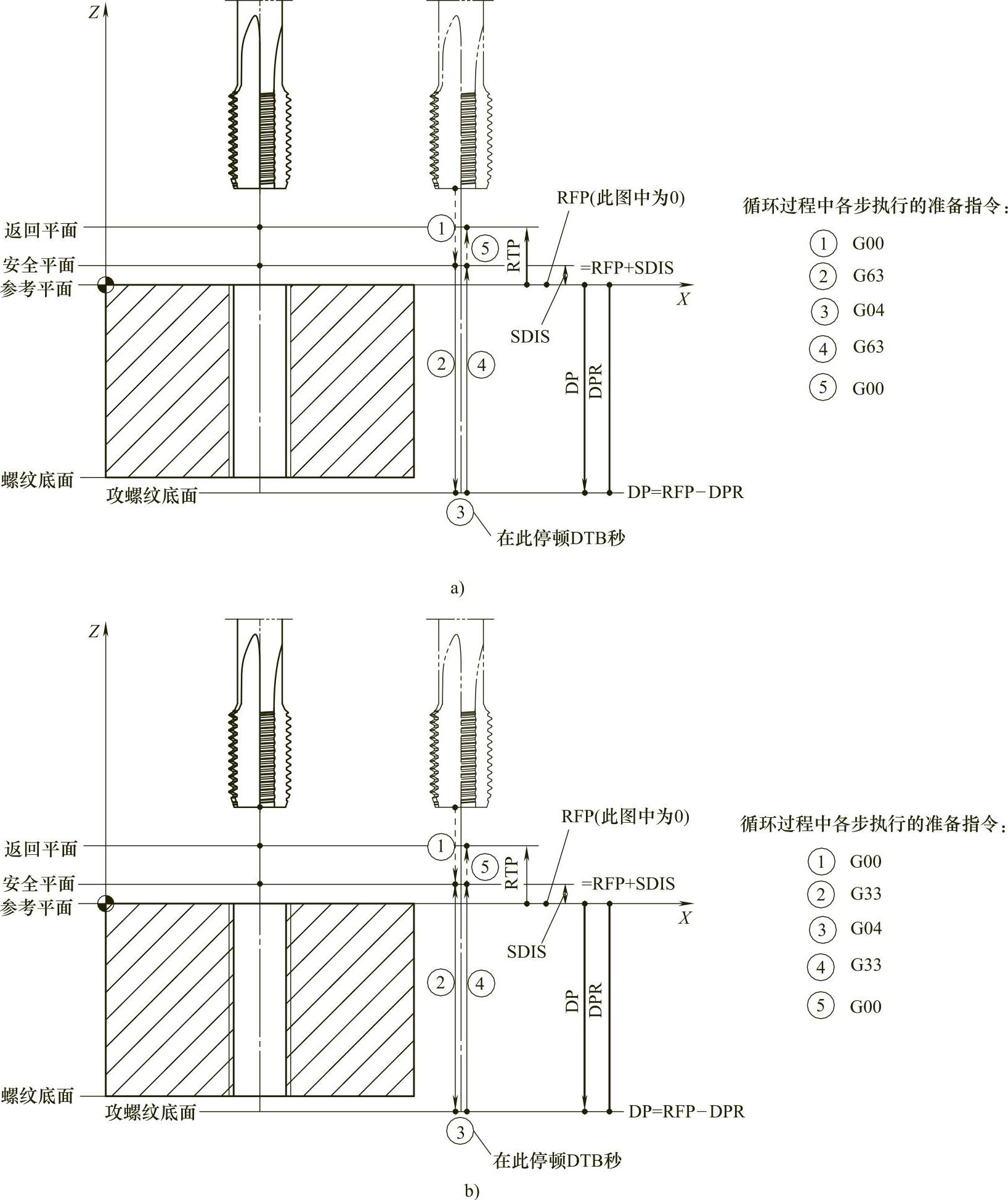
图4-16 西门子802D系统的柔性攻螺纹循环指令CYCLE840部分参数含义
a)无编码器攻螺纹 b)有编码器攻螺纹
PP404.MPF
N01 G54 G90 G00 S600 M03
N02 T1 D1
N03 G17 X40 Y30 Z60
N04 G01 F300
N05 CYCLE840(15,0,5,,34,1,4,3,1,16,)
N06 M02
有编码器攻螺纹,其他参数及条件不变,PP405.MPF程序如下:
PP405.MPF
N01 G54 G90 G00 S600 M03
N02 T1 D1
N03 G17 X40 Y30 Z60
N04 G01F300
N05 CYCLE840(15,0,5,,34,1,4,3,0,16,)
N06 M02
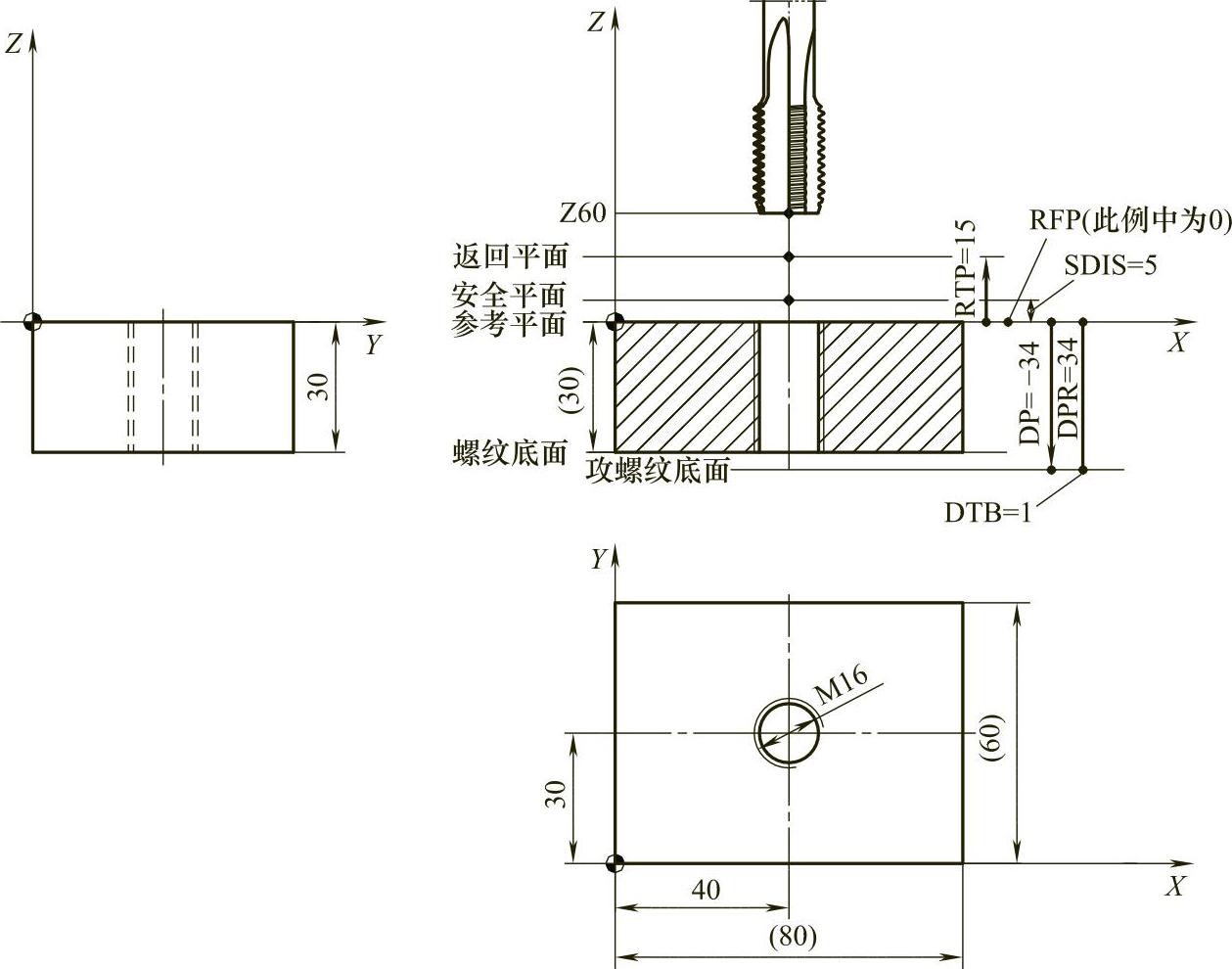
图4-17 用西门子802D系统的柔性攻螺纹循环指令CYCLE840攻M16螺纹
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。