



整流/回馈单元的结构如图8-20所示。由整流桥、逆变桥、短路保护和预充电装置、参数设定和操作单元、控制和调节的电子板箱、直流母线输出端子、自耦变压器等组成。
有源逆变回馈单元是通过自耦变压器与电网相连接,自耦变压器的变化一般选1∶1.2,好处是:电动时可使整流桥触发角推到0°,可以达到与普通变频器同样高的功率因数和效率等。因为,为了防止逆变颠覆,回馈桥的αmax≤150°,如不加变压器匹配电压,整流桥的αmin≥30°,使直流母线电压降低约14%,整流器的利用率很低,且功率因数下降。
逆变器的电路结构如图8-21所示,由直流连接母线、参数设定与操作单元、控制和调节的电子板箱、IGBT功率元件、电机接线端子等组成。逆变器的控制是用微处理器按磁场定向矢量控制进行的,内部用了一个非常快速的电流调节器,可以很精确地和负载转矩相匹配,动态性能非常好。
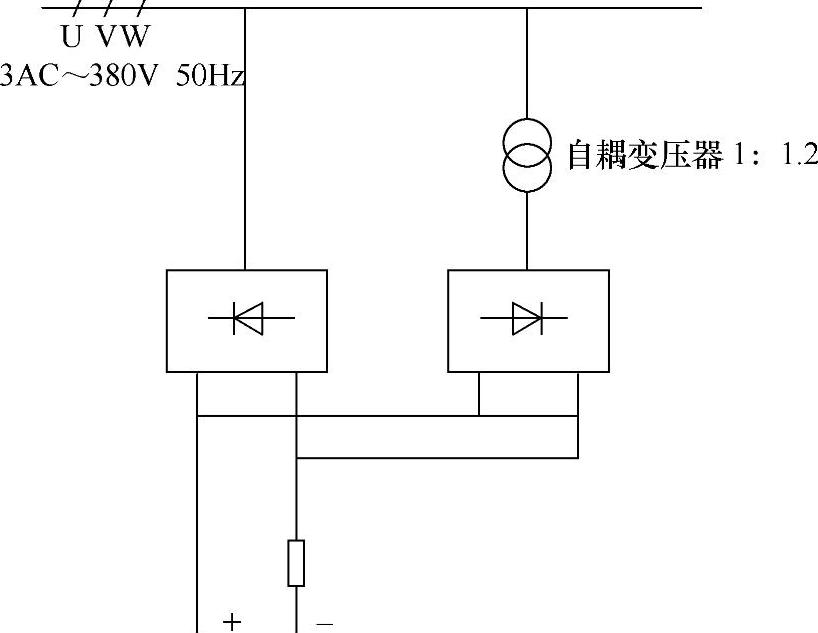
图8-20 带自耦变压器的整流/回馈单元电路原理图
1.外接控制端的配置及工作特点
控制接线端子 控制端子功能很丰富,这里仅列出常用信号端子,其相应的功能码设置见参数设置部分。
X9:7、8、9端子——开关量输出2,这里选做变频器故障输出信号,如图8-22所示(7—8常开点,8—9常闭点);5、6端子——开关量输出3(常开),用作变频器正常状态输出信号;3、4端子——开关量输出4(常开),频率水平检测输出信号,用来控制抱闸回路的信号。
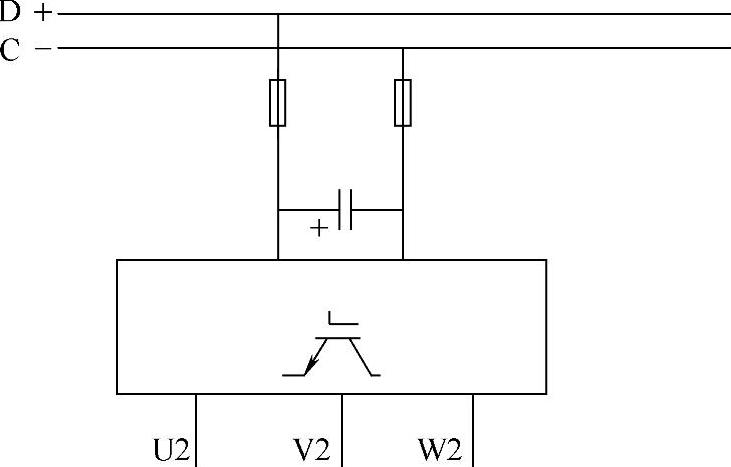
图8-21 逆变器的原理框图
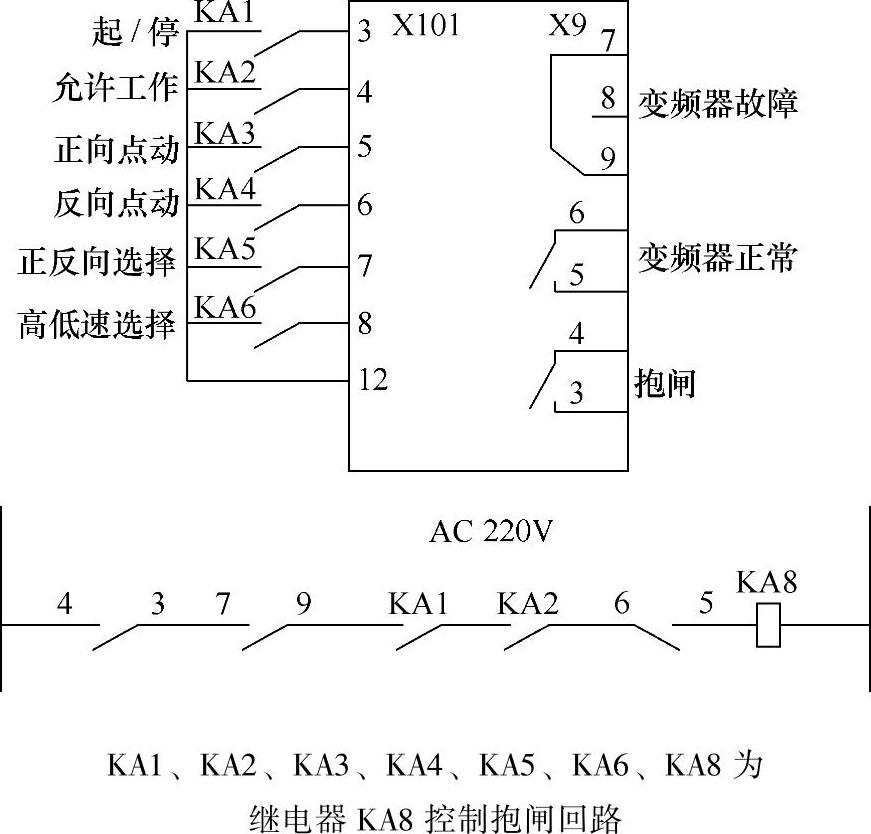
图8-22 变频器输入输出端子图
X101:3——开关量输入1,用作变频器的起、停信号;4——开关量输入2,外部条件允许信号;5——开关量输入3,正向点动控制信号;6——开关量输入4,反向点动控制信号;7——开关量输入5,正、反向选择;8——开关量输入6,高、低速选择。
X102:13、14、16——外接频率给定电位器,-10~+10V。
变频器外部开关状态控制方式,使“允许工作”端处于闭合状态,则“起/停”闭合时,电动机起动,运行于频率设置的给定值(DC0~±10V,通过端子X102:13、14、16,外接电位器),给定值为正时,电动机正转,给定为负时,电动机反转。当“起/停”处于断开状态时,电动机即降速停止。
速度设定也可以采用多步设定方式,端子接线如图8-22所示。在“允许工作”端处于闭合状态、“起/停”闭合时,电动机起动,根据X101:7、8端子的状态,电动机可以运行于正向高速、正向低速、反向高速、反向低速。速度设定在P401、P402、P403、P424中。正向点动和反向点动控制与此类似,其控制信号由端子X101:5、6来控制,点动速度设定在P448、P449中。
图8-22中,为了防止外部线路串入的干扰信号,KA1、KA2、KA3、KA4、KA5、KA6、来自中间继电器的触点,所有控制信号可以来自PLC逻辑控制,也可以直接来自操作台。KA8直接去控制抱闸回路的接触器线圈,如图8-22所示。
2.参数设置
相应的参数编制如下:
P060=2 固定设置菜单;
P366=0 0:具有PMU的标准设置;1:具有OP1S的标准设置;
P970=0 参数复位;
P060=5 系统设置菜单;
P071=380v 装置输入电压;
P095=10 异步/同步电动机,国际标准;
P100=3 1:V/f控制;
3:无测速机的速度控制;
4:有测速机的速度控制;
5:转矩控制;
P101=380v 电动机额定电压;
P102=57.9A 电动机额定电流;
P103=0 电动机励磁电流,如果此值未知,设P103=0当离开系统设置此值自动计算;(https://www.xing528.com)
P108=730 电动机额定转速;
P109=4 电动机极对数;
P115=1 自动参数设置,参数值P350~P354设定到额定值;
P130=10 10:无脉冲编码器;11:脉冲编码器;
P330=1 0:线性(恒转矩);1:抛物线特性;
P114=1 控制系统的工艺边界条件,1:扭矩、齿轮传动和较大的惯性矩;
P383=0 确定电动机冷却方式;
P368=0 选择设定值和命令源;
P554=0011 起/停命令;
P462=1 斜坡函数发生器加速时间;
P463=0 斜坡函数发生器加速时间的单位o:s;1:min;2:h;
P464=1 斜坡函数发生器减速时间;
P465=0 斜坡函数发生器减速时间的单位o:s;1:min;2:h;
P580=0018 正向/反向控制信号;
P581=0020 高速/低速控制信号;
P568=0014 正向点动控制信号;
P569=0016 反向点动控制信号;
P401=50Hz 正向高速频率值;
P402=30Hz 正向低速频率值;
P403=-50Hz 反向高速频率值;
P404=-30Hz 反向低速频率值;
P448=10Hz 正向点动频率值;
P449=-10Hz 反向点动频率值;
P443.0=0041 设置主给定值为正向高速频率值;
P443.1=0042 设置主给定值为正向低速频率值;
P443.2=0043 设置主给定值为反向高速频率值;
P443.3=0044 设置主给定值为反向低速频率值;
P571=1 允许正向运转;
P572=1 允许反向运转;
P561=0012 变频器允许工作控制信号;
P060=0 结束参数设置。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。