



【摘要】:相关参数P1442速度实际值的滤波时间;P1460速度控制器的增益系数;P1462速度控制器的积分时间。补充说明:减小P1442有助于抑制超调。P1442大时,可减轻由负载波动引起的频繁调整,但会引起超调,尤其是停车时容易过冲。建议用户可预置P1460=50,P1462=200,然后根据实测速度曲线手动调整。高低速时速度控制器参数的切换高比例倍数有利于低速时的加减速控制,但在高速运行时如机械系统不理想可能会发生轻微振动,这时可采用高速、低速不同比例倍数。
(1)相关参数
P1442速度实际值的滤波时间;
P1460速度控制器的增益系数;
P1462速度控制器的积分时间。
(2)调整原则
调整原则如图4-10所示。
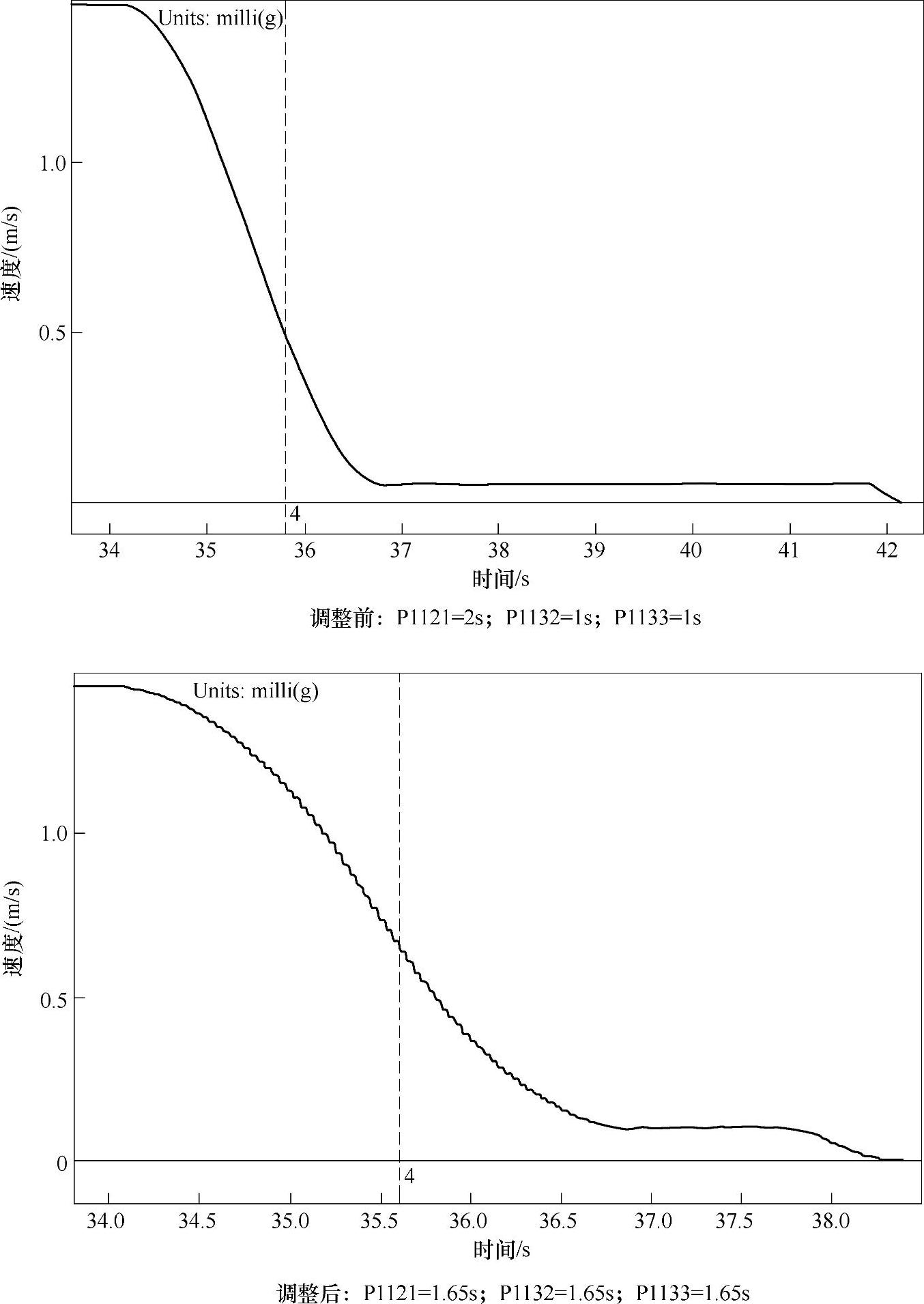
图4-11 减速调整曲线
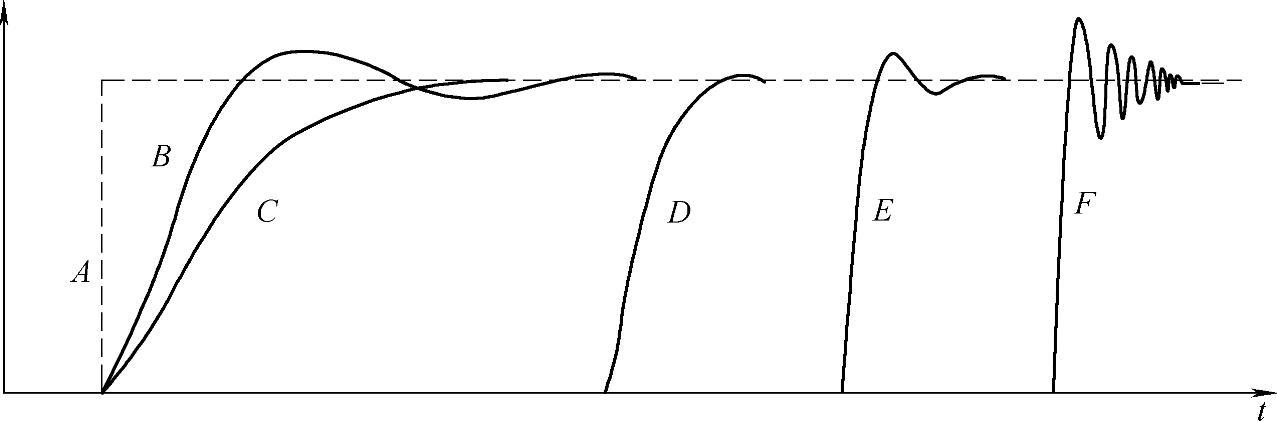
图4-12 调整原则
图4-12中,A为速度给定,其余为反馈曲线。
A:速度给定信号;
B:P1460和P1462都偏小;
C:P1460偏小,低速控制效果差,高速时振动小;(https://www.xing528.com)
D:最优;
E:轻微超调,P1460偏大,P1462偏小,低速时控制效果好,高速时可能会振动大,在需要较高动态响应时采用;
F:严重超调,P1460太高,P1462太小。
补充说明:减小P1442有助于抑制超调。但太小时反应过于灵敏,系统容易振荡。P1442大时,可减轻由负载波动引起的频繁调整,但会引起超调,尤其是停车时容易过冲。调试时该参数一般先不动,可作为辅助手段与P1460/1462配合调整。
(3)自动优化功能
MM440有速度控制器自动优化功能,但在电梯应用中,仅能在曳引机脱开钢丝绳的情况下进行,此时还可测出转动惯量,但在挂上钢丝绳(即挂上轿厢)后,由于负载特性和位置限制,不能做自动优化,只能根据速度波形手动调整。建议用户可预置P1460=50,P1462=200,然后根据实测速度曲线手动调整。
(4)高低速时速度控制器参数的切换
高比例倍数有利于低速时的加减速控制,但在高速运行时如机械系统不理想可能会发生轻微振动,这时可采用高速、低速不同比例倍数。具体方法参考表4-11和表4-12。在低层低速梯上也可不用切换。
表4-11 高低速切换一
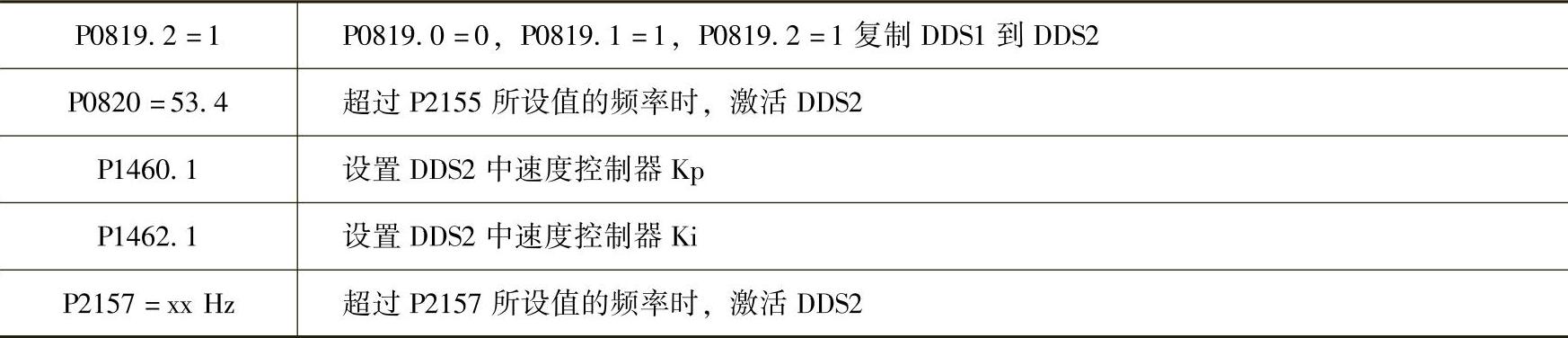
表4-12 高低速切换二

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。