



MM440变频器内部有PID调节器。利用MM440变频器能很方便地构成PID闭环控制,MM440变频器PID控制原理如图3-3所示。PID给定源和反馈源分别见表3-1和表3-2。
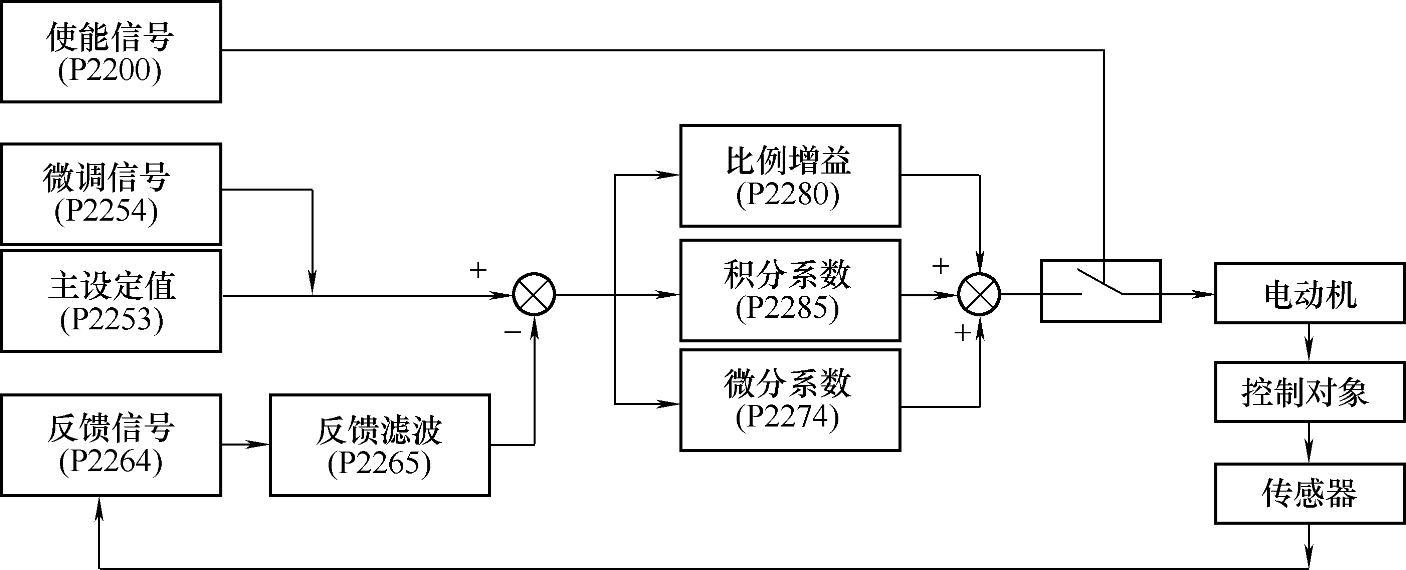
图3-3 MM440变频器PID控制原理简图
表3-1 MM440 PID给定源

表3-2 MM440 PID反馈源

【操作内容】
实现面板设定目标值的PID控制运行。
【操作方法和步骤】
1.按要求接线
图3-4所示为面板设定目标值时PID控制端子接线图,模拟输入端AIN2接入反馈信号0~20mA,数字量输入端DIN1接入的带锁按钮“SB1”控制变频器的起/停,给定目标值由BOP面板(▲▼)键设定。
2.参数设置
1)参数复位。恢复变频器工厂默认值,设定P0010=30和P0970=1,按下“P”键,开始复位,复位过程大约为3s,这样就保证了变频器的参数恢复到工厂默认值。
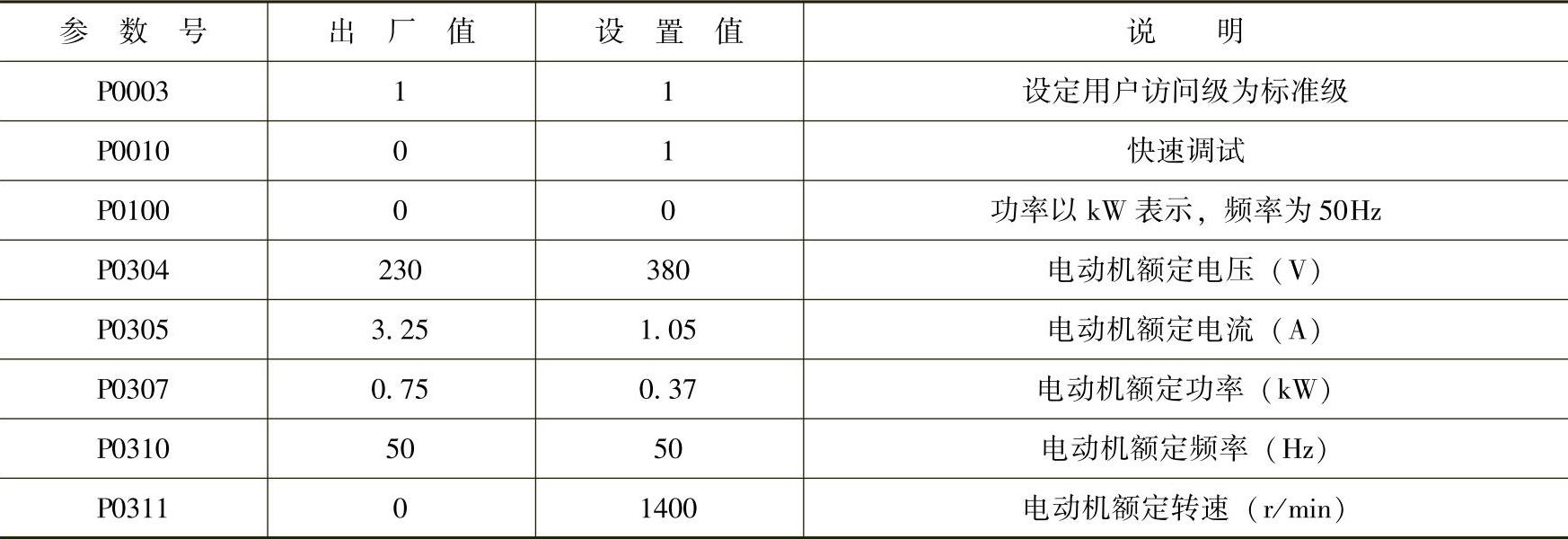
2)设置电动机参数,见表3-3。电动机参数设置完成后,设P0010=0,变频器当前处于准备状态,可正常运行。
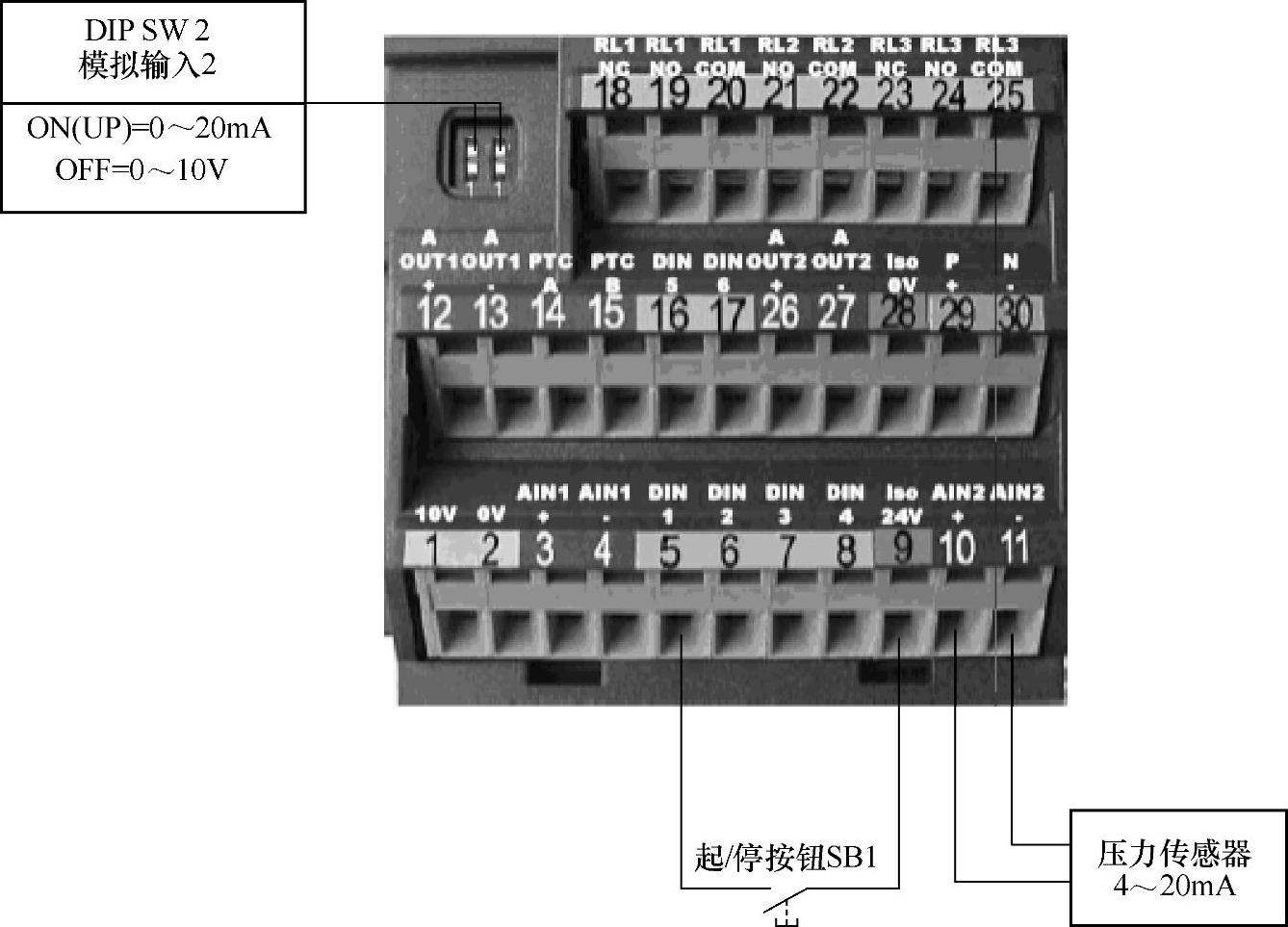
图3-4 面板设定目标值的PID控制端子接线图
表3-3 电动机参数设置
3)设置控制参数,见表3-4。
表3-4 控制参数表(https://www.xing528.com)
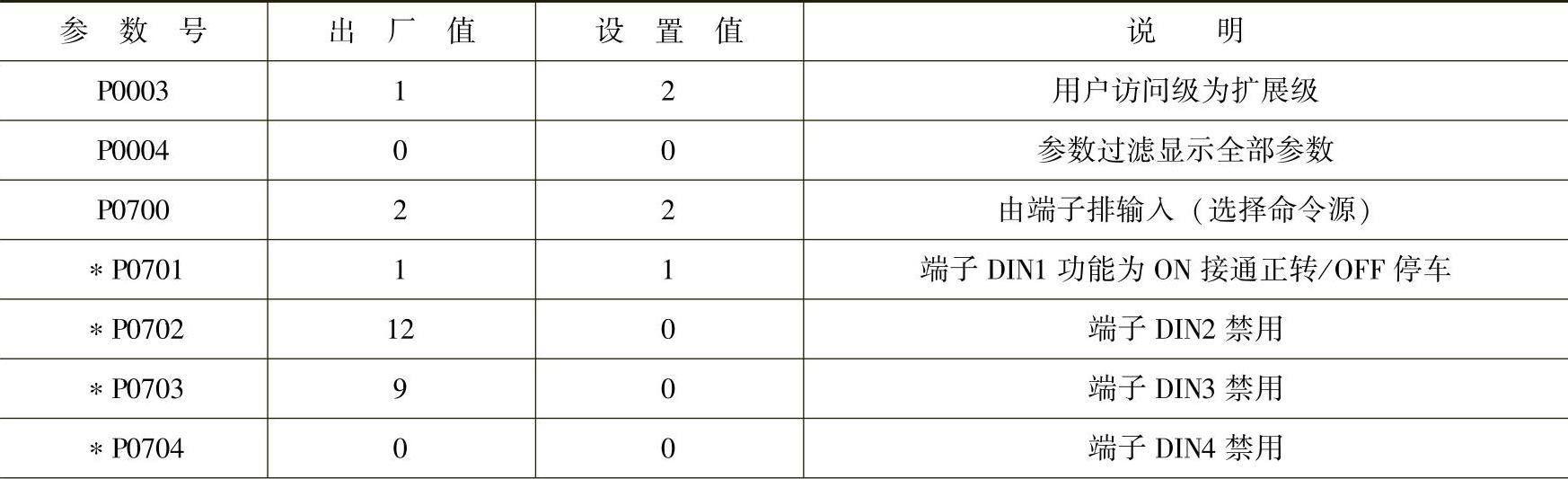
(续)
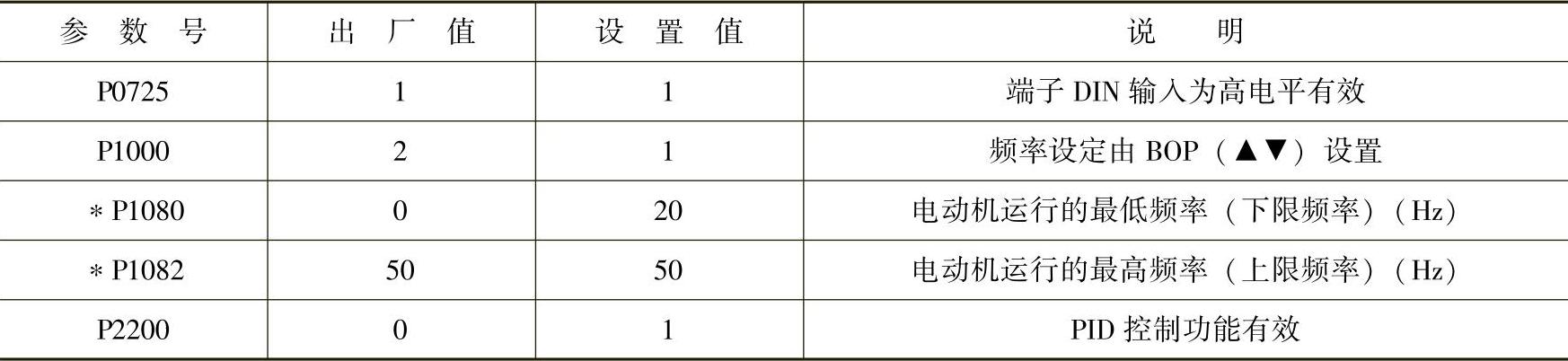
注:标“∗”号的参数可根据用户的需要改变,以下同。
4)设置目标参数,见表3-5。
表3-5 目标参数表
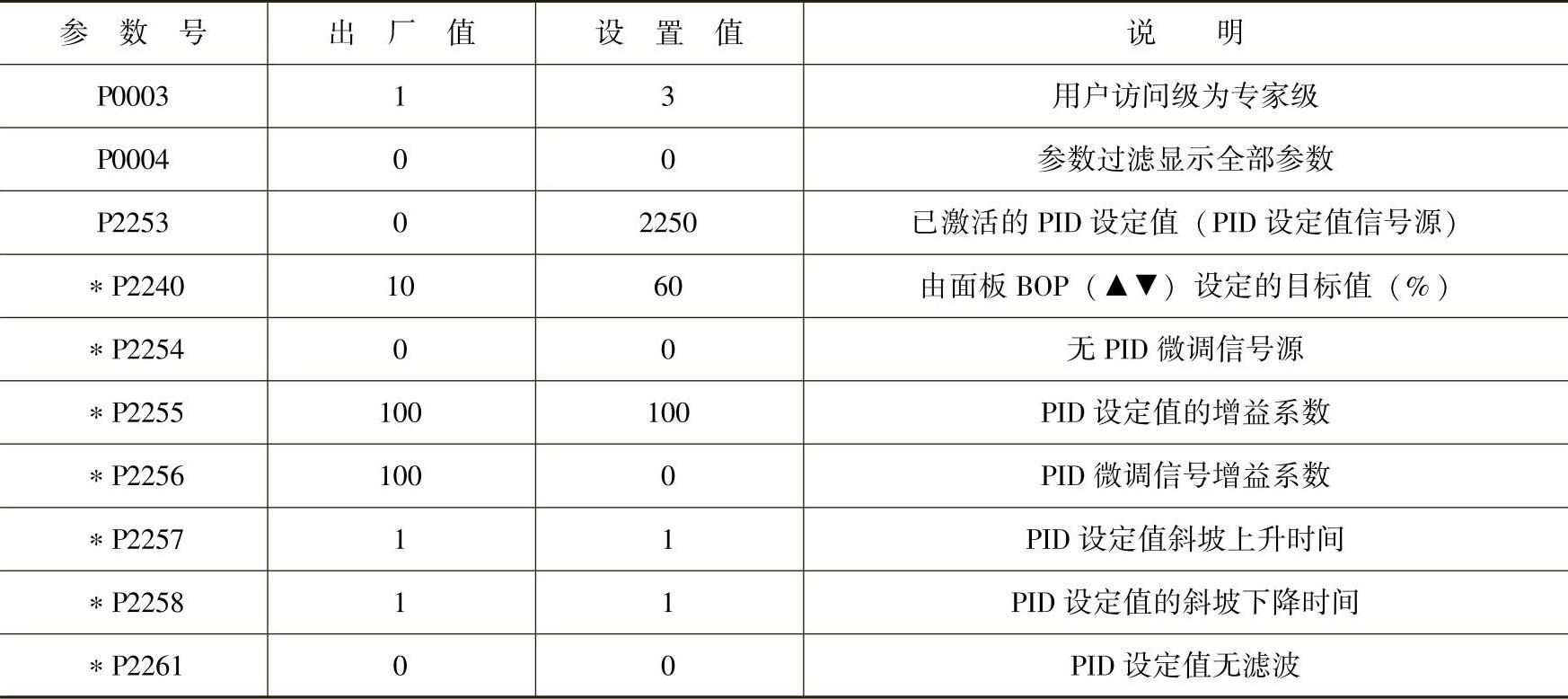
当P2232=0允许反向时,可以用面板BOP键盘上的(▲▼)键设定P2240值为负值。
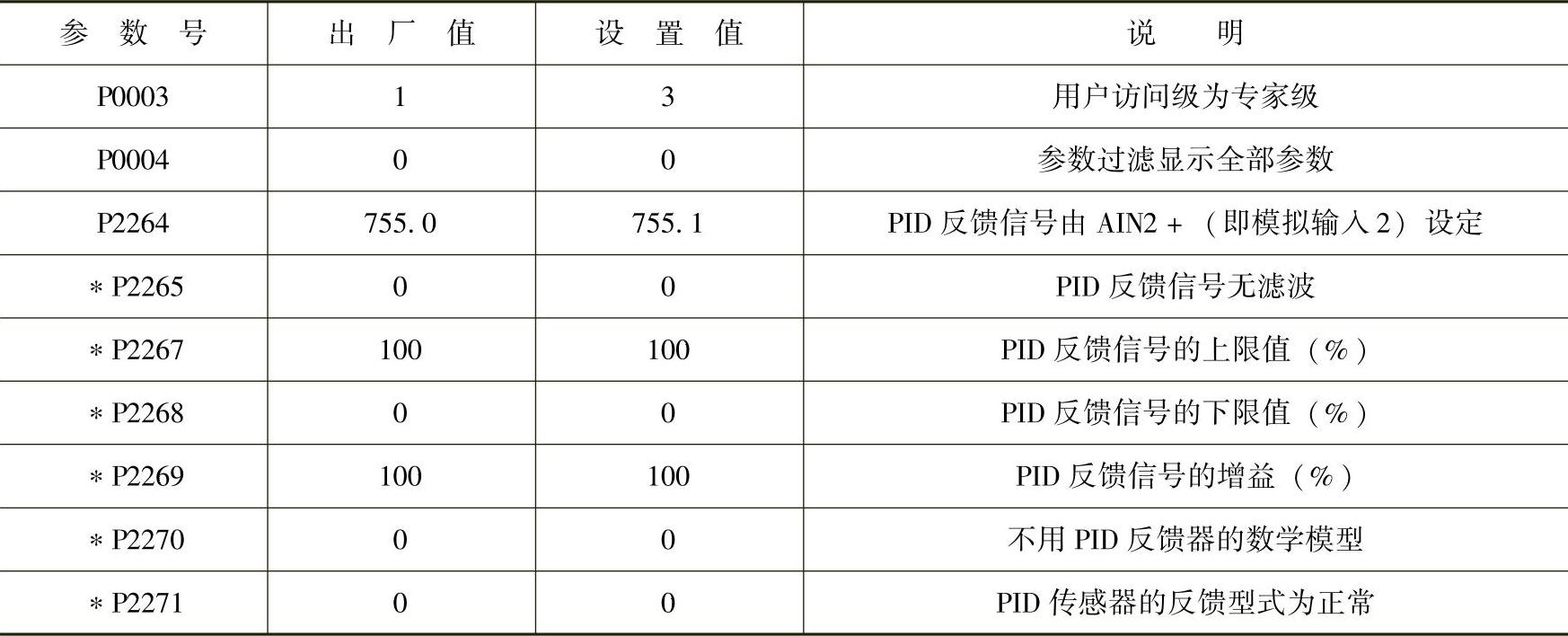
5)设置反馈参数,见表3-6。
表3-6 反馈参数表
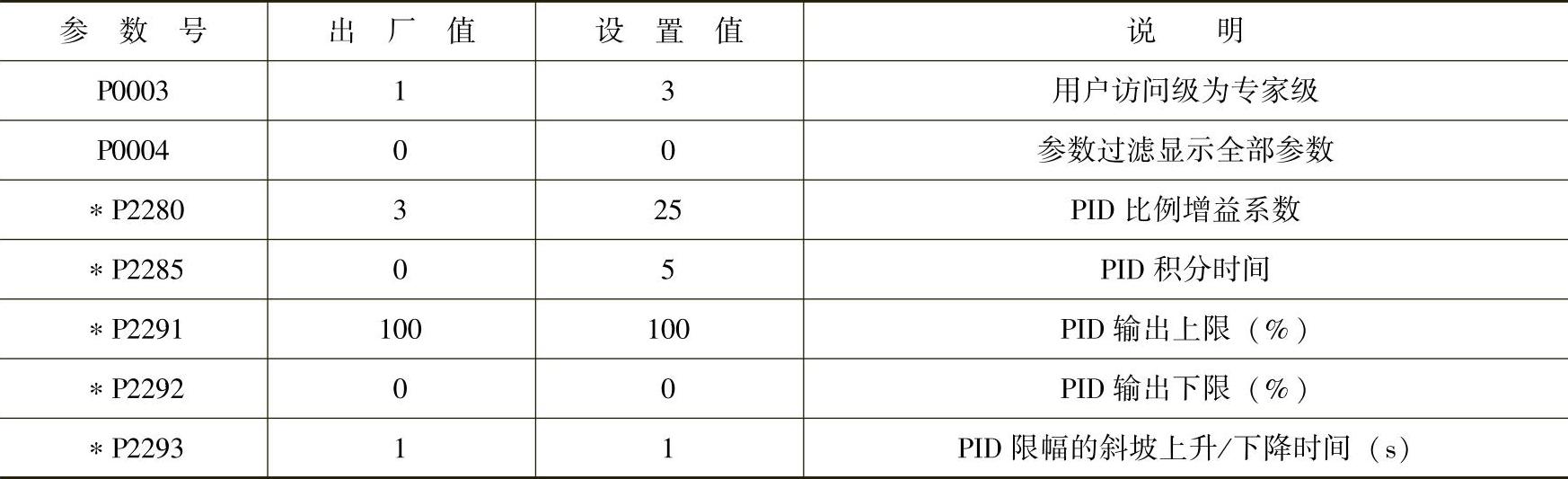
6)设置PID参数,见表3-7。
表3-7 PID参数表
3.变频器运行操作
1)按下带锁按钮“SB1”时,变频器数字输入端DIN1为“ON”,变频器起动电动机。当反馈的电流信号发生改变时,将会引起电动机速度发生变化。
若反馈的电流信号小于目标值12mA(即P2240值),变频器将驱动电动机升速;电动机速度上升又会引起反馈的电流信号变大。当反馈的电流信号大于目标值12mA时,变频器又将驱动电动机降速,从而又使反馈的电流信号变小;当反馈的电流信号小于目标值12mA时,变频器又将驱动电动机升速。如此反复,能使变频器达到一种动态平衡状态,变频器将驱动电动机以一个动态稳定的速度运行。
2)如果需要,则目标设定值(P2240值)可直接通过操作面板上的(▲▼)键来改变。当设置P2231=1时,由(▲▼)键改变了的目标设定值将被保存在内存中。
3)放开带锁按钮“SB1”,数字输入端DIN1为“OFF”,电动机停止运行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。