



偏航由最大偏航角速度ωk以及偏航时间在设计寿命中所占的比例来描述。如果偏航所占的时间不知道,可以采用DS 472规定。假设偏航时间占所有风速时间的10%,这对于绝大多数场址是十分保守的。
静载荷包括机舱和风轮的重量、作用在轴承上的轴向力。静载荷与风施加在风轮上的载荷叠加如图6-26所示。
在图6-26中,风轮载荷的方向是根据传统的坐标系画出的,一般它并不是这个方向。
1)FxR:机舱和风轮上的侧向载荷;
2)FyR:风轮上的推力;
3)FzR:风轮的重量;
4)MxR:风轮的倾覆力矩;
5)MyR:风轮的驱动力矩;
6)MzR:风轮的偏航力矩;
7)FN:机舱的重量;
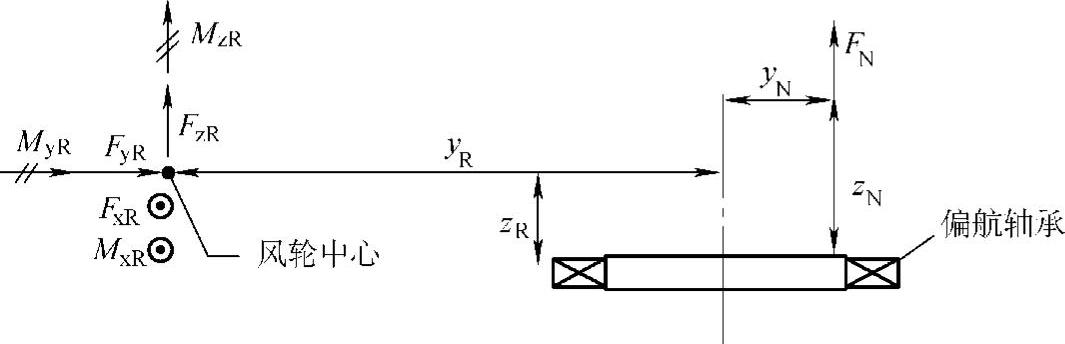
图6-26 作用在风轮及偏航轴承上的载荷(https://www.xing528.com)
8)yN:到机舱重心的水平距离;
9)yR:到风轮重心的水平距离;
10)zN:到机舱重心的垂直距离;
11)zR:到风轮重心的垂直距离。
根据上述数据可以计算出作用在偏航轴承上的静载荷、倾覆力矩Mtilt、偏航力矩Myaw、径向力Fr以及轴向力Fa,即

偏航力矩取决于偏航误差及风速的幅值。偏航力矩的方向取决于风轮旋转的方向以及偏航误差的方向。
极限偏航设计力矩是偏航驱动及偏航制动的设计基础,很可能是在最大风速带最大偏航误差的情况下出现的。从动态特性讲,偏航力矩有波动的趋势,其频率是转子频率的x倍,此处x表示叶片数目。
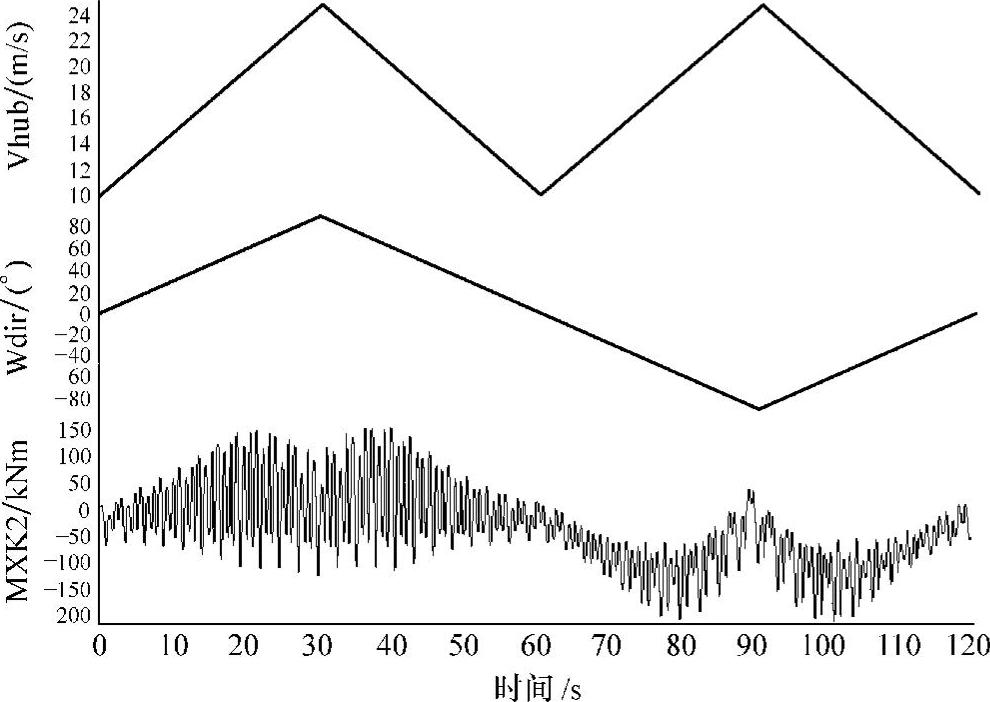
图6-27 风速、偏航误差、偏航力矩之间的关系
图6-27给出了三叶片风力机的计算机仿真结果,偏航力矩是偏航误差和风速的函数。偏航误差的波动频率等于转子频率及3倍的转子频率。偏航方向变化,偏航力矩符号发生变化。如果偏航误差和风速增加,偏航力矩增加。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。