



1.风流场的模化
风流场包括了3个风速度分量:
1)纵向风速;
2)横向风速;
3)垂直风速。
风流场通常划分如下:
1)带剪切和斜度的平均风流场;
2)波动风流场,如湍流。
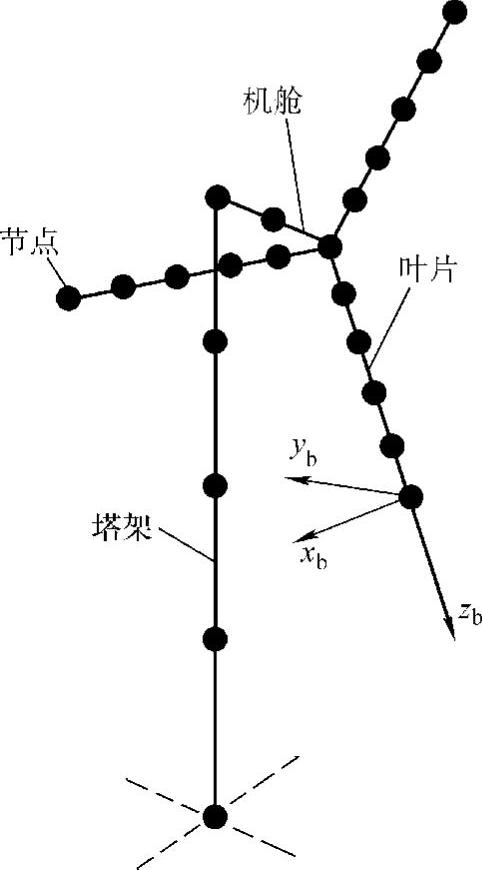
图4-2 有限元素模型表示风力机结构的例子
风流场模拟是风力机结构分析的重要部分。对风力机而言,必须考虑湍流在空间上的变化,因此需要对风进行三维模拟。风流场模拟的基本目的是为了预测在空间若干点上风速的时间系列值,如跨过风力机风轮盘的若干点。风速的这样一些时间系列值构成了风力机结构分析模型中有用的输入信息。
用于描述平均风流场的参数通常是那些描述风廓线以及风速矢量垂直分量的参数。对平坦均匀的地形,风速矢量的垂直分量一般取为零。
在平均风流场的基础上选加波动风流场,也就是湍流流场,三个方向的速度分量,以纵向、横向及垂直方向的湍流分量。用于描述风流场波动部分的参数取决于它所采用的是哪一个模型作为其代表。
为了在空间的若干点上预测风流场,必须考虑风流场在空间上的一致性。有两个模型用于生成跨过风轮盘的综合风流场,具体如下:
1)Sandia的Veers模型(Veers,1988);
2)Ris∅的Mann模型(Mann,1994)。
Veers模型在风轮平面上采用圆形网格,而Mann模型采用二次曲线网格。两个模型采用傅里叶逆变换结合相干的完全因式分解法生成一套综合的时间系列湍流风。
Veers模型基于由Shinozuka发展的方法。它基于单个点上湍流谱的表达式和相干函数(Cohenrence function)。凯莫尔(Kaimal)公式被选作谱模型,即
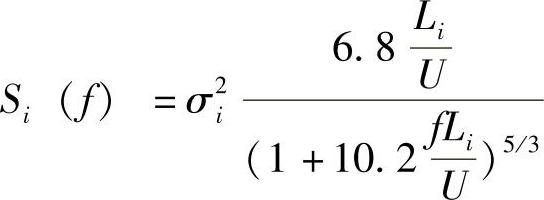
同时采用指数达文波特(Davenport)相干模型,即

式中 i——第i个分量;
f——频率;
r——距离或空间间隔;
L——长度尺度;
σ——风速的标准偏差;
c——相干衰减因子。
通过在横向和垂直方向使用与纵向同样的计算方法,把原始的Veers模型从一维的纵向湍流模型推广到全流场的三维3个分量的模型。模化的3个分量之间没有交叉的修正。用于Verrs模型的参数包括:
1)平均风速U;
2)风速分量的标准偏差σu、σv和σw;
3)湍流分量的积分长度尺度Lu、Lv和Lw;
4)相干衰减因子cu、cv和cw。
其中,脚标u、v和w分别表示对应纵向、横向和垂直方向的分量。关于积分长度尺度的详细情况参见3.1.5节。
Mann模型基于大气表面湍流层的谱张量公式,模型是针对同质地形开发的,所用到的参数如下:
1)平均风速U;
2)地面以上的高度z;
3)粗糙度长度z0。
Mann模型有能力表示3个风速分量之间的交叉修正。
通过测量建立模型中的参数。湍流强度由纵向风速的标准偏差定义为IT=σu/U,通常通过杯式测风仪测量。所测量的是纵向和横向风速分量的矢量和。因此,基于这个基础计算的湍流强度通常比由纵向分量单独决定的广泛采用的湍流强度要高。但如果没有其他估计,它通常用于表示纵向湍流强度。
σu、σv和σw之间的关系在3.1节中已给出。纵向长度尺度Lu一般取决于高度和地形粗糙度,详见3.1节。横向和垂直方向的长度尺度假定与纵向长度因子有关,即Lv=0.3Lu及Lw=0.1Lu。纵向衰减因子ci的典型值的范围是2~27。
Veers和Mann模型都可以用于模拟垂直于平均风速方向的平面上若干点的时间系列风速,如风轮平面上。关于模型的详情见Veers(1988)和Mann(1994,1998)的相关研究。
2.空气动力学模型
空气动力学模型处理空气运动以及作用在相对于空气运动的物体上的力。空气动力学理论使得对流过风轮的空气所产生的力进行定量预测成为可能。
对失速整定风力机,在运行过程中的高风速情况下,会发生大范围的气流分离。失速整定利用风力机叶片失速时所发生的升力减少现象来控制风力机的功率输出,从而限制功率输出及载荷。风轮上的整个三维流动是十分复杂的,不稳定的流动取决于若干变量,具体包括:
1)风速;
2)风切变;
3)大气湍流;
4)偏航角;
5)转速;
6)风轮半径;
7)风轮叶片的外形:
①扭转,
②锥度,
③厚度分布;
8)翼型特征:
①厚度,
②弦长,
③表面平整度,
④进口边厚度,
⑤粗糙度敏感度,
⑥钝/尖出口边。
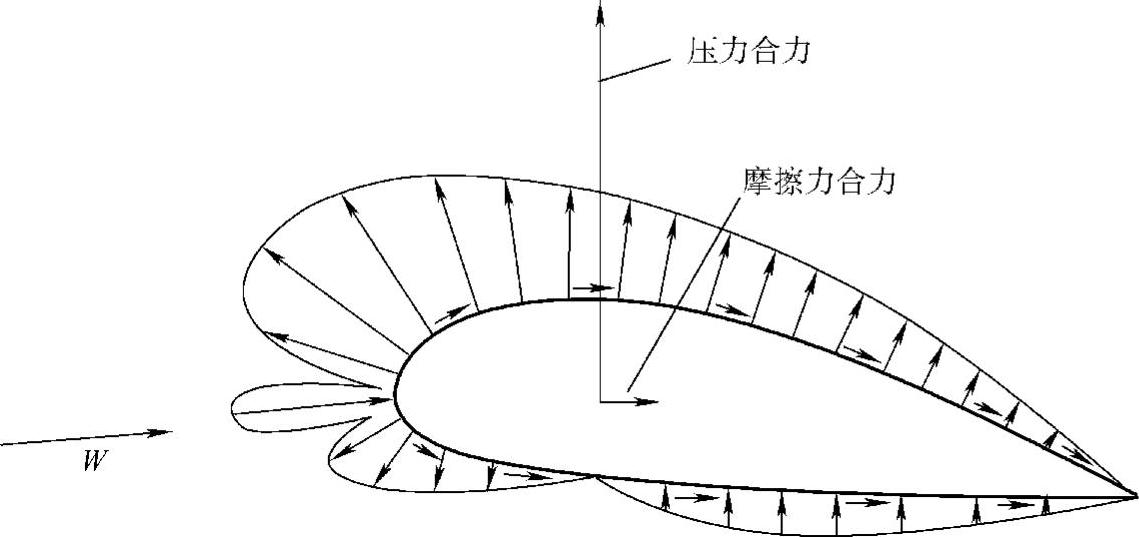
图4-3 翼型上的气动力分布和结果
下面给出了气动模型的主要描述及其在风轮叶片上的应用,引入了最重要的概念,也即所谓的叶素动量理论以计算风轮叶片上的气动力。采用这种方法,利用动量平衡计算叶素上的力,同其他方法一样,该方法也采用了若干项理想化的简化,从而使方法能够实际应用。也有其他的一些方法,但耗时且没有任何好处。
首先来考虑经过翼型的二维流动。二维流动被限制在一个平面内,平面之外的速度为零。为获得二维流动,把翼型看成沿展向无限延伸是必要的。对真实的叶片,沿叶片展向,叶片的形状、扭转及翼型都是变化的,并且叶片从轮毂开始在叶尖结束。然而,对长而细的叶片来讲,展向方向的速度分量相对于流线方向一般较小。二维气动力学解对风力机风轮叶片具有实际的价值。气流作用在叶片上的合力F作为压力和摩擦力的积分得到,如图4-3所示。而合力F又可以分解成与相对风速W垂直的一个分量FL和与其平行的分量FD,FL为升力,FD为阻力,如图4-4所示,升力FL和阻力FD取决于入流角大小。
在图4-4中,c/4为1/4弦长的点。
失速是一种非线性现象,当入流角达到某一限制值αstall时,附着气流会突然失去,翼型升力会急剧下降。失速角αstall有一定的随机性。
升力系数CL和阻力系数CD定义如下:

式中 ρ——空气密度;
c——翼型的弦长;
FL——单位长度的升力;
FD——单位长度的阻力。
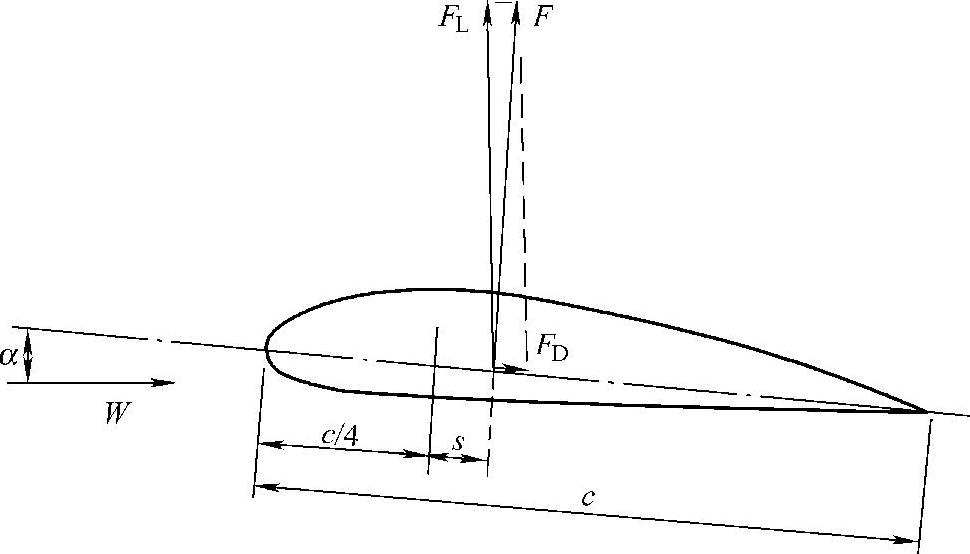
图4-4 二维流动中翼型的升力、阻力定义
升力系数和阻力系数是图4-5所示入流角α、翼型形状、雷诺数Re=cW/ν(其中,ν是运动黏度)的函数。CL随α线性增加,直至失速角αstall,此时翼型开始失速。对更大的α值,CL达到最大值,α值再增加CL就开始减小了。对较小的α角,CD几乎是恒定值,但失速以后,它迅速增加。失速现象同翼型上表面的边界层分离密切相关。翼型失速的方式取决翼型的几何形状,带有很尖前缘的薄翼型,如进口边附近曲率较大的翼型,就比厚翼型失速更突然,这种差异是由于边界层分离造成的。系数CL和CD的值可以从相关表中查到,并根据风洞测量结果进行校正,参见Abbott和Von Doenhoff(1959)相关研究。
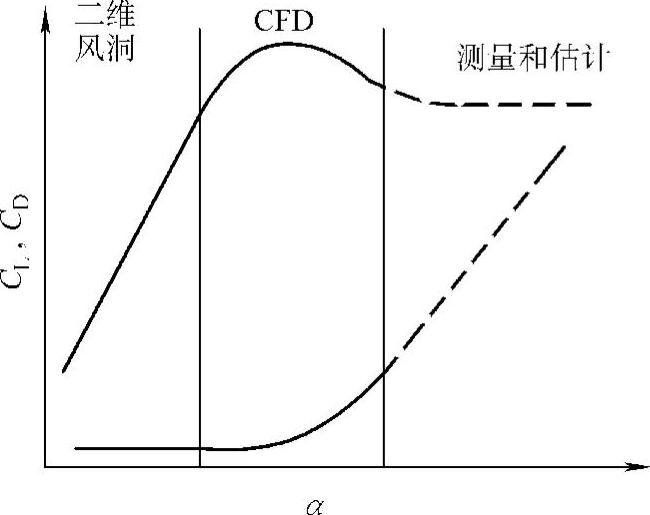
图4-5 翼型的升力和阻力曲线
图4-5给出了CL和CD随入流角α变化的例子。二维风洞测量结果用于得到失速前区域的系数值。带三维效应修正的计算流体动力学用于得到失速区的系数值。在后失速区,典型的是用试验结果来决定这些系数值。另外,由Viterna和Corrigan(1981)发明的方法可以用于这些预测。该方法假定风轮无扭转,因此该方法的结果在该假设不满足时需要进行修正。应用这种方法,最大的阻力系数在入流角α=90°时为
CD,max=1.11+0.018AR
式中 AR——翼型的展弦比。
展弦比AR定义为叶片长度与特征弦长的比值。后失速区的阻力系数由下式给出:
CD=B1sin2α+B2cosα 15°≤α≤90°
B1=CD,max(https://www.xing528.com)

升力系数由下式给出:

式中 αs——开始失速时的入流角(通常为15°);
CDs——开始失速时的阻力系数;
CLs——开始失速时的升力系数。
为了以数学方式描述这种物理现象,风力机风轮可以被视为一个盘,它可以通过降低风速从风中吸收能量。盘周围的风速和压力条件如图4-6所示。
三维流动将在叶片出口边后面产生一排连续的切向旋涡。风轮后面的尾迹将会是旋转的,尾迹如图4-7所示。
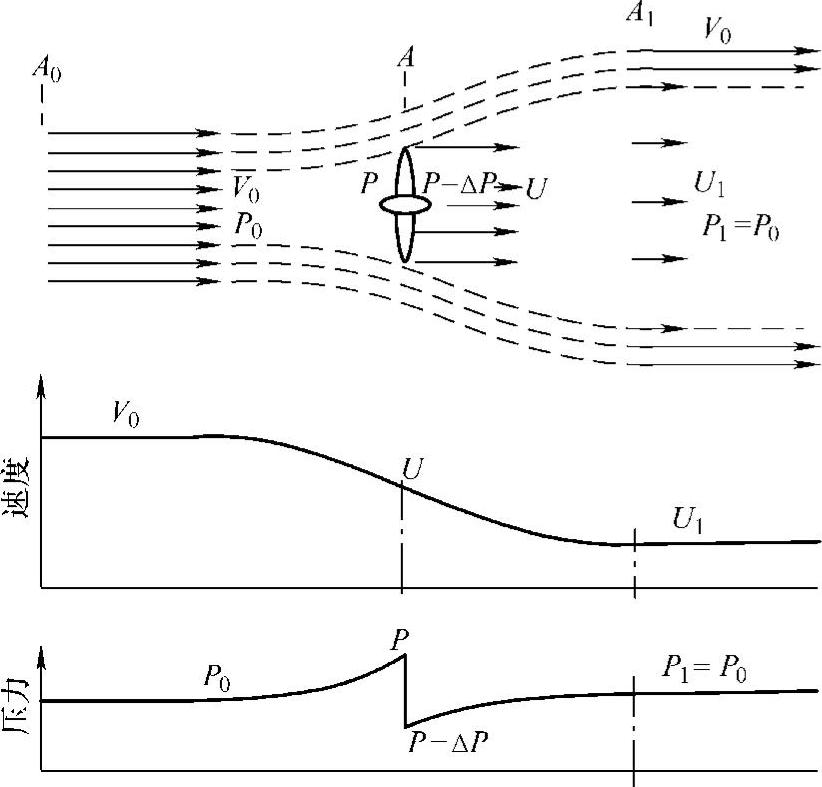
图4-6 风力机对风速和气压的影响
3.叶素动量方法的计算步骤
运用叶素动量理论方法,风轮扫掠的通流面积被划分成若干个同心圆环元素,在元素与元素之间径向相互独立的假设前提下,这些元素被认为是彼此分离的。也就是说,在其中一个元素上发生的一切,其他元素上没有任何感应。通常,每一个环又被分成若干个管,而它们也被假定为彼此独立。这种方法允许非对称诱导,风速被假定为在每一个圆环上是均匀分布的,流体中叶片每一个环形元素上的力假定是常量。这个假定对应于有无限多个叶片数,将在以后对此进行修正。
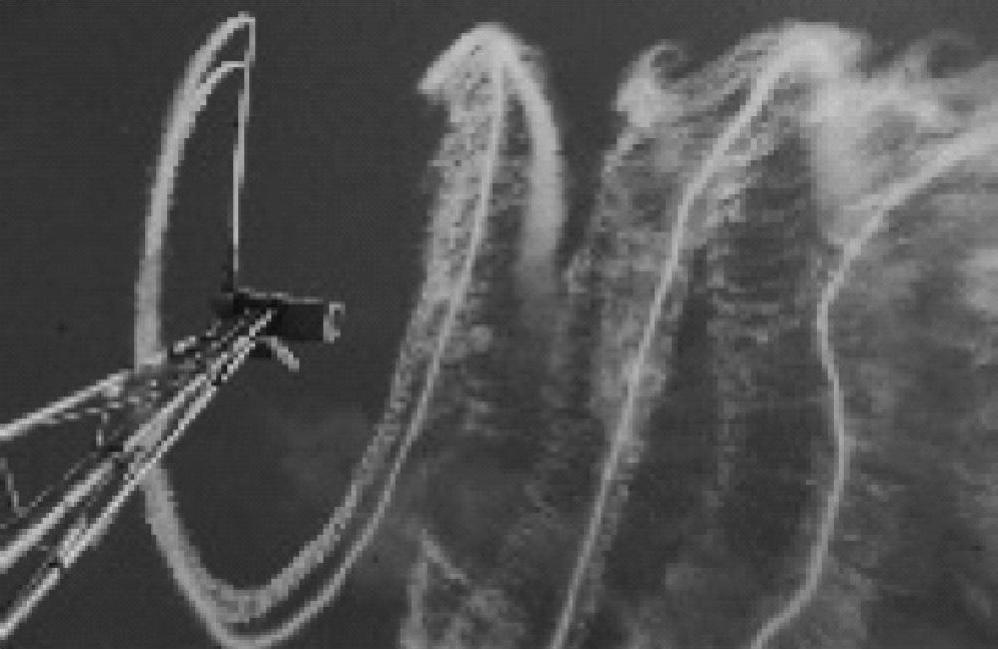
图4-7 用烟显示的尾迹
现在考虑半径为r、厚度为dr的环形元素,作用在风轮圆盘该元素上的推力为
dT=2πrρu(V0-u1)dr
式中 V0——风轮前的风速;
u1——风轮后尾迹风速;
u——u=(V0+u1)/2,通过风轮平面的风速。
环形元素的力矩为
dQ=2πr2ρuCθdr
如果在风轮上游半径r处切向风速为零,而尾迹中风速为uw。引入轴向诱导因子a=1-u/V0及切向诱导因子a′=uw/(2ωr),此处ω表示风轮角速度。推力和力矩的表达式可以写为
dT=4πrρV20a(1-a)dr
dQ=4πr3ρV0ω(1-a)a′dr
这时需要对a和a′进行初始选择,建议选择a=a′=0作为初始假设。
气流角ϕ是风轮平面和旋转叶片的相对速度Vrel方向之间的夹角,气流角可以通过下式计算:
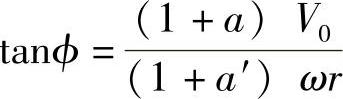
当地入流角α=ϕ-θ,此处桨距角θ是叶片相对于风轮平面的当地桨距角,如图4-8所示。
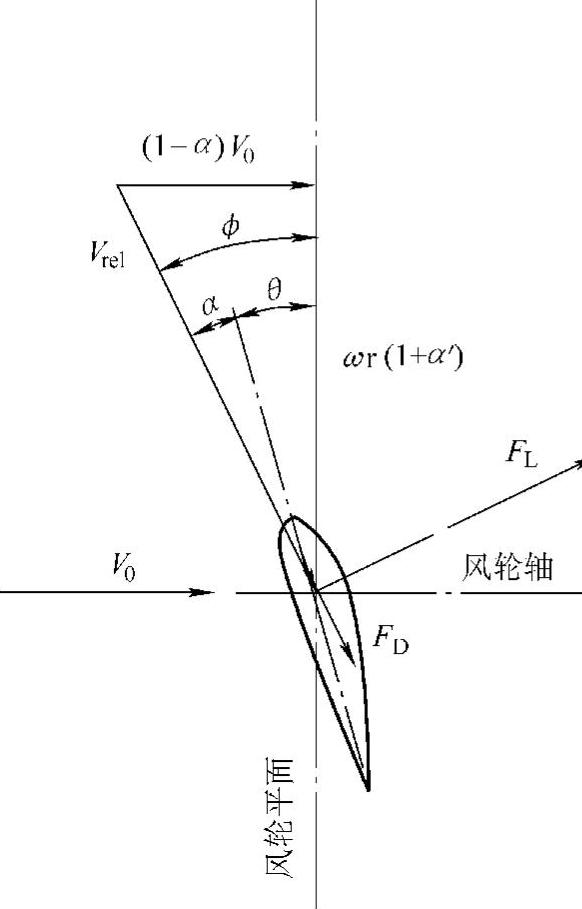
图4-8 速度分量
通过恰当的表可以确定叶片的升力系数CL和阻力系数CD。它们是α和叶片相对于弦长的相对厚度的函数,把这些系数转换到法向和切向方向CN和CT有
CN=CLcosϕ+CDsinϕ
CT=CLsinϕ-CDcosϕ
实度σ定义成由叶片覆盖的环形元素的截面积比。密实度取决于环形元素的半径r,可以通过下式得到:
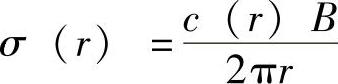
式中 B——叶片数。
可以通过下式计算影响因子a和a′:
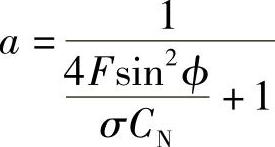
式中

式中 R——风轮半径。
注意,F为所谓的普朗特(Prandtl)叶尖损失系数。这是针对有限长度叶片修正后的诱导因子,因为在叶尖处难以保持叶片翼型上下表面之间的压差。回顾风轮叶片扫掠面积上无穷多叶片的假设,通过普朗特叶尖损失系数表达式也可以对风轮平面有限数目叶片进行修正。
考查a和a′的值,如果它们与计算中假定的a和a′的值偏差较大,超过了可以接受的范围,就回到初始假定的a和a′值,用新的a和a′值计算气流角ϕ,反复这个计算过程,直到得到一套最新的a和a′。这个迭代过程需要多次反复直到得到一套收敛的a和a′值。注意,如果a变得大于0.3,则简单的动量理论不再成立。公式对这种情况的a存在一个修正,只要a>ac,其中ac≈0.2,就可以采用格劳特(Glauert)修正,a可以用下式代替:

式中
注意,为了在低风速情况下正确地计算诱导速度,采用格劳特修正特别重要。
一旦决定了一套收敛的a和a′,它们就可以用来计算距旋转轴r处风轮叶片当地的力,如垂直于风轮平面的力和风轮平面切向的力。叶片单位长度上的法向力为
而叶片单位长度上的切向力为

这个过程对所有模化的环形元素反复进行,如对所有的半径值r,因此结果就包括了沿风轮叶片单位长度上法向力和切向力的分布,这些分布作为计算叶片任意截面上应力、力、力矩的基础。特别是,rFT可以沿叶片积分,从而给出一个叶片对总的转轴力矩的贡献。
4.结构模型
风轮叶片是细长的,这样从结构的观点来看,它可以被视作梁。因此,可以采用梁的理论,参见5.1节。采用梁理论,对风轮叶片进行分析,一系列与叶片翼型有关的定义是有用的。考虑叶片的一个截面,弹性轴垂直于横截面,与横截面相交于一点,在这一点法向力(出横截面平面)不会使弯曲增加。而切变中心是在该点平面内的力不会使翼型在平面内绕该点转动的点。平面内的两个主轴相互垂直,与弹性轴相交。主轴通过这样的现象来定义,即无论何时对其中之一施加弯矩,梁都只绕该轴发生弯曲,而对其他任何轴施加弯矩都会诱导出对另外的轴,而不仅仅是对施加弯矩的轴的弯曲。
关于对各种轴的刚度惯性矩在图4-9中有所定义,可以根据标准公式计算,这些公式在结构工程力学教课书中可以找到。参考轴X′和主轴X之间的夹角α可以按下式计算:

式中

为惯性矩的偏差;
分别为对应于参考轴X′、Y′的弯曲刚度参数。
这样对于主轴的弯曲刚度就可以按下式计算:

这里处理了最重要的风轮叶片刚度数据。注意,由于现在风力机叶片的扭转刚度通常都较大,一般不考虑扭转刚度,注意这种情况在将来的风力机设计中可能会有所改变。
在结构模化和分析中,重要的是要当心颤振现象,它可能由于扭转和挥舞运动耦合引起。扭转和挥舞频率的低比率及高的尖部速度导致颤振增加,可能引起风轮叶片的破坏,参见4.3.4节相关内容。
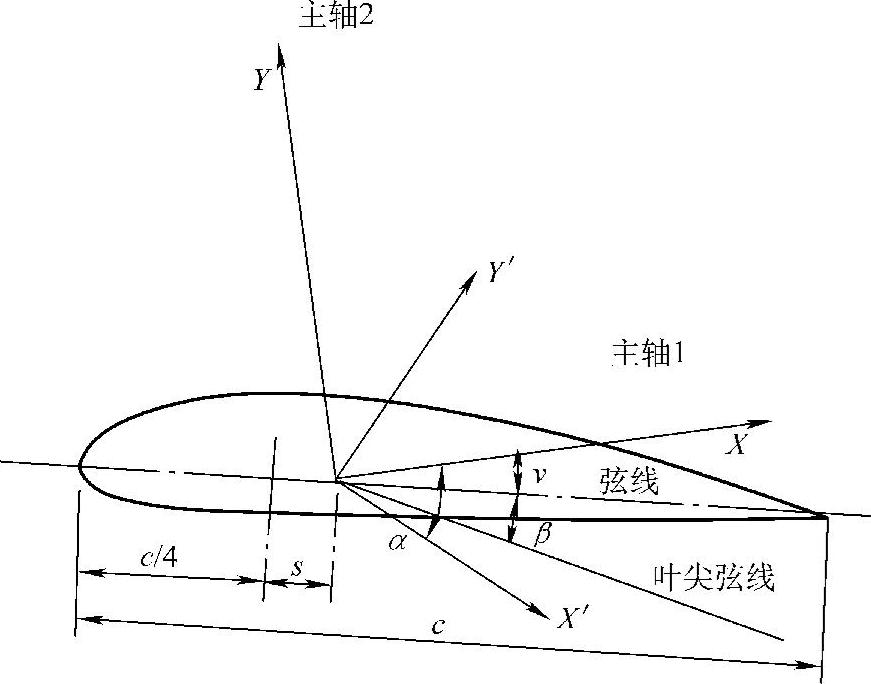
图4-9 叶片截面示出主轴、弦线、叶尖弦线和弦线角
5.控制系统的模化
控制系统是为了使风力机的运行参数保持在规定的“正常”限制之内。也就是保持风力机上的载荷在一定的限度内。由于运行参数通过现时显示值,以及/或者它们的一次或二次导数值来进行控制,因此控制算法总是被设定好,并结合气弹程序一起用于载荷预测。
对带变速的变桨距风力机,有一种方法来表示控制系统。下面的描述是关于变速变桨距风力机控制系统的。
风力机的机械效果是
式中 ρ——空气密度;
A——风轮面积;
u——风速;
CP——风轮效率,CP是桨距角β和叶尖速比λ(λ=ωRR/u,其中ωR是风轮的角频率,而R是风轮半径)的函数。
桨距角β和风轮角速度ωR是两个用于控制风力机的参数。风力机的控制通常基于下面两种方法之一:
1)在额定功率以下,优化功率。比如,通常当β和λ取特定的优化组合(βopt,λopt),风轮尽可能地靠近CP的最大值。这通过保持λ在它的优化值λopt处恒定而选择β使其等于它的优化组合值βopt来达到,但λ不能直接控制,因为u很难高精度进行测量。因此,对给定ωR值,哪一个功率输出是最优的必须采用替代信息进行判断。ωR被用作风力机的控制参数并使功率最优,而不是λ。这个信息可以通过风轮的气动数据建立起来,所有翼型数据及计算机程序就是为了这个目的。
2)通过保持功率尽可能接近额定功率来限制功率。
由于风的湍流,气动驱动力矩连续地变化。该力矩通过转换系统被风轮转换成电功率,它作为作用在转换系统上的初始载荷显示。通过变桨距和对风力机速度的调节,气动功率的变化通过风轮角速度的变化来吸收,而不会引起传递到齿轮箱上的力矩的变化。这意味着相对传统的固定转速风力机,可以保持齿轮箱上的力处于较低的水平。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。