



(1)基于动态黏着控制的微操作器微操作器的SEM图片及实物对比图如图9-40所示。

图9-40 微操作系统和实物对比图
微操作黏着机理。黏附是微、纳米尺度下十分普遍和突出的现象,它是导致微操作和MEMS器件在制造和使用中失效的主要因素,也是实现微、纳米结构组装时必须克服的一个难题。在黏着研究中,通常把分离力(Pull-offForce)称作黏着力(Adhesion Force),它是衡量黏着强度的重要标准。黏着力主要来自范德华作用力、表面张力和静电力。因此,掌握黏着力的值及其变化规律,对于研究微观接触力学和黏着行为以及解决黏着问题都具有十分重要的意义。
基于动态黏着控制的MEMS微操作工具。该操作器是一种集成了力检测功能的静电梳齿驱动式硅基微夹钳操作工具。微夹持钳的技术特点为:结合了动态黏着控制操作的要求,并实现了微操作工具微型化、低能耗、集成化且运用了MEMS技术。微夹持器结构如图9-41所示,微夹持器由作为衬底的Pyrex7740玻璃和作为结构层的单晶硅键合组成。硅结构层主要由以下几个部分组成:静电梳齿驱动部分、支撑及柔性弯曲梁、力检测梁。其中静电驱动分定齿和动齿,定齿与动齿之间是通过键合的玻璃实现电隔离。动齿与夹持器末端操作臂连接,通过柔性梁将动齿的直线运动转变为操作臂的摆动,从而实现夹持动作。力检测梁位于操作臂的末端,当对被操作对象实施夹持操作时,检测梁上集成的压阻传感器将会反馈夹持力的变化。检测梁外侧设计出保护梁,防止夹持力过大或误操作造成的检测梁折断。图9-42是微夹持器的末端梁及检测梁示意图。
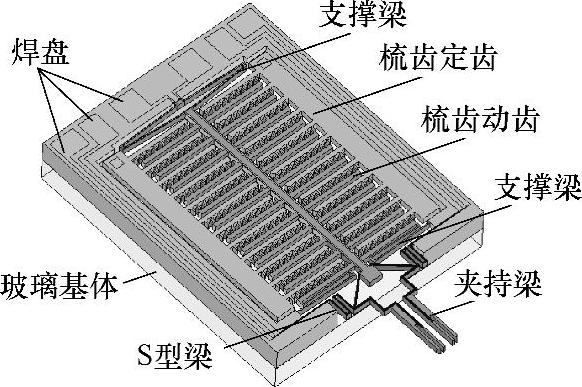
图9-41 微夹持器结构
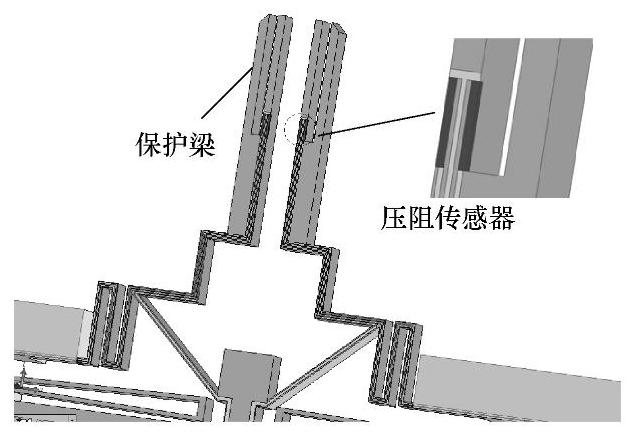
图9-42 微夹持器末端梁及检测梁示意图
基于动态黏着控制的微夹持器控制系统。微夹持器的控制系统如图9-43所示。
微夹持器控制系统基本组成部分如下:
1)主控计算机。
2)静电驱动电源:采用线性驱动和正弦波动态驱动。
3)压电陶瓷驱动部分:压电陶瓷选用了德国PI公司的型号为PST150/5×5/20的陶瓷,该型号陶瓷的额定名义位移为20μm,刚度60N/μm。驱动电源选用了哈尔滨博实精密测控有限公司的压电陶瓷驱动电源。
4)力检测电路:包括检测传感部分和温度补偿模块,主要实现微夹持力的反馈,形成闭环控制,达到精确的夹持操作。
静电驱动器在直流驱动电压作用下使动齿产生位移,通过柔性梁和S形梁的转化实现微夹持器末端的张合运动。静电驱动微夹持器控制电路由控制器、DAC(数模转换器)、DC-DC(直流转直流)变换升压电路、功率放大电路、输入电路、显示电路及与上位机进行通信的电路组成。通过输入电路可以将预期的驱动电压输入系统,最终的驱动电压可以通过显示模块显示出来。

图9-43 基于动态黏着控制的微夹持器的控制系统
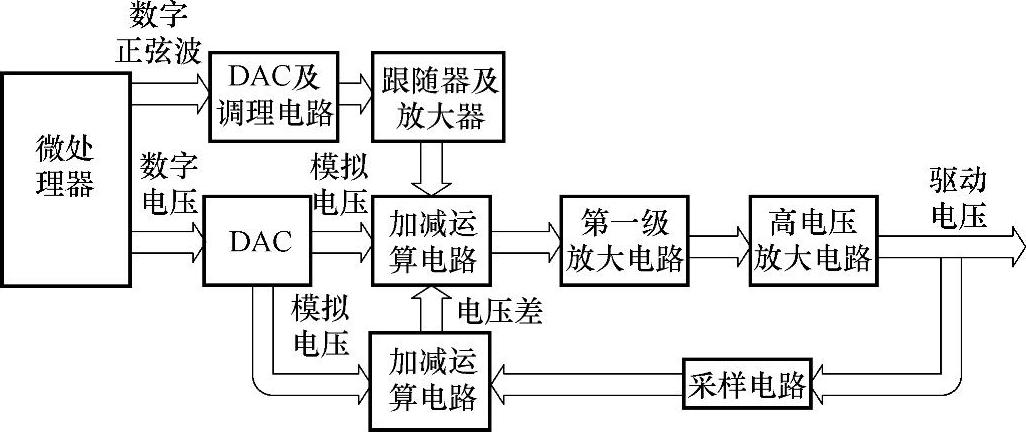
为实现微夹持器末端梁在夹持方向上的高频振动,驱动设计中加入了振动驱动电路模块,并将这一部分集成到功率放大电路中。功率放大电路接收自微处理器的驱动电压指令,通过一系列的放大电路与运算电路转化为实际所需的驱动电压,使静电夹持器产生夹持力。功率放大电路主要有DAC模块、放大器模块、振动电路模块、采样反馈运算电路模块、高电压放大模块等组成,如图9-44所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图9-44 功率放大电路原理框图
实现微操作对象动态释放所加的振动电路模块主要由DAC、调理电路、跟随器和放大器组成。振动环节的工作原理是在一定的驱动电压基础上,微处理器输出一个可变频率与可变幅值的数字正弦波。微处理器产生的数字正弦波信号经DAC后转换为模拟信号,此时输出的模拟信号是不完全的正弦波信号,需要通过一个调理电路将其平滑处理为正弦波信号。然后经过电压跟随器和放大器后,与未放大前的驱动电压进行加减运算电路叠加,经后级放大电路即可驱动微夹持器末端梁的振动。在微处理器的内部可以通过生成的逻辑电路及应用控制程序改变输出正弦波的频率及其幅值,所以驱动微夹持器的电压是在一个基础驱动电压上按正弦波的频率变化。振动电路模块的电路原理图如图9-45所示。
为实现复合振动,需要在垂直于微夹持器操作平面内增加一个振动源。这里使用微驱动压电陶瓷平台做为振动激励装置,将微夹持器固定在微驱动压电陶瓷平台上,通过对压电陶瓷施加一定频率的驱动电压致使振动激励装置产生相应的振幅和频率。所设计的压电陶瓷微驱动平台如图9-46所示。
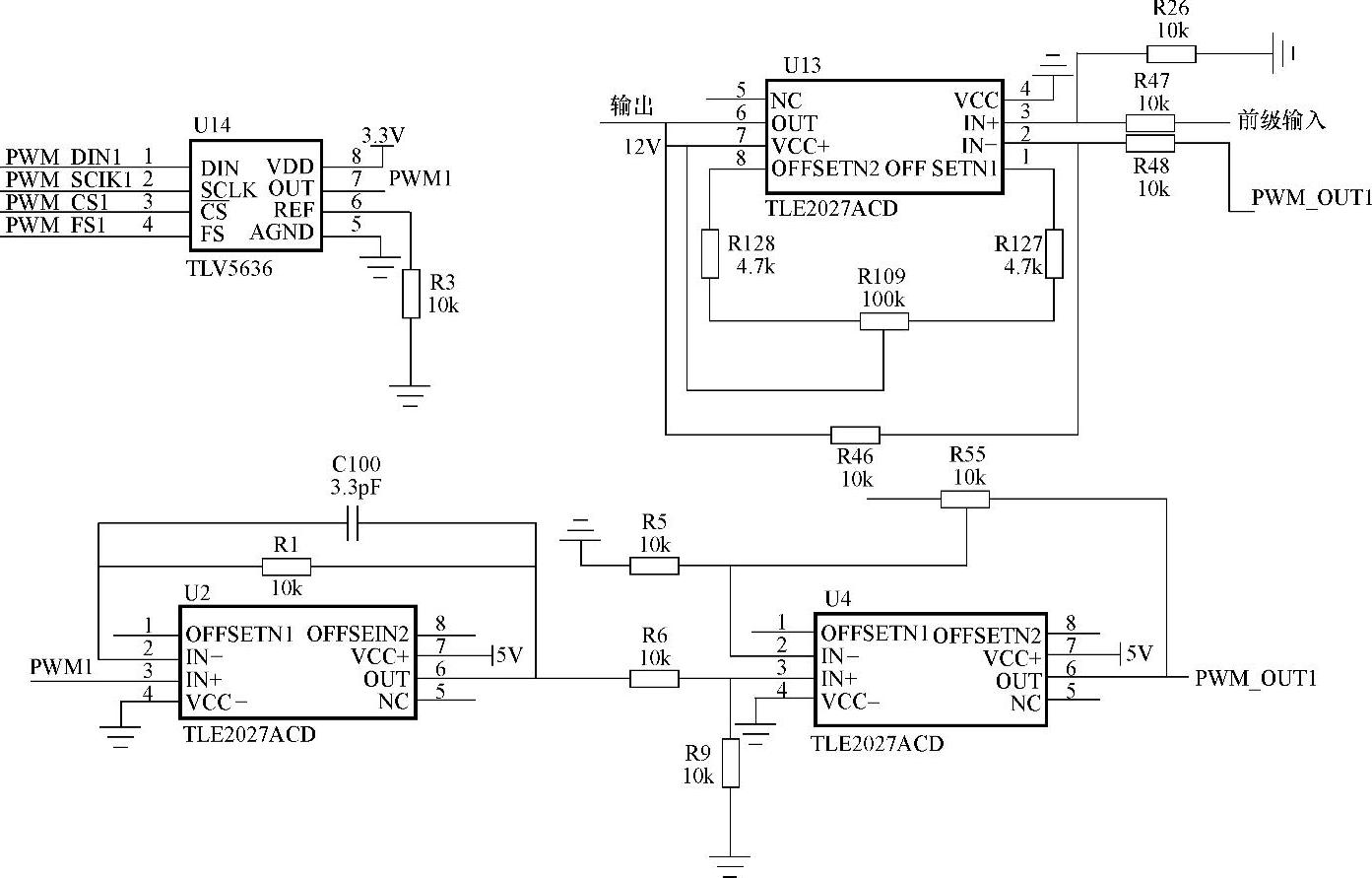
图9-45 振动电路模块的电路原理图

图9-46 压电陶磁微驱动平台
(2)激光星间通信终端精瞄准定位系统
在卫星光通信过程中,由于光场束宽小、传输距离长、卫星平台和空间环境引起的振动及其他干扰等原因,光束的捕获、跟踪和瞄准问题变得尤为突出。不精确的光束精瞄将导致信号的大量丢失和系统性能严重下降,所以需建立APT系统以保证信号的有效传输。APT系统采用粗瞄准系统和精瞄微定位系统复合轴控制结构完成捕获、跟踪和瞄准任务。为克服压电陶瓷的不良效应,准确快速地把射出的信标光对准对方端机,同时抑制系统内部干扰,需采用电反馈技术构建精瞄微定位系统。
APT系统包括粗瞄准系统和精瞄微定位系统。APT控制器内部控制粗瞄准系统和精瞄微定位系统,外部与卫星数据总线、卫星姿轨控制器和光学模块等进行外部交互。粗瞄准系统采用两路交流力矩电动机驱动万向转台实现水平角和俯仰角定位;精瞄微定位系统利用压电陶瓷驱动精瞄偏转镜实现水平角和俯仰角的角度精调,采用电阻应变式微位移检测模块进行精确反馈。电荷耦合器件(CCD)探测器和四象限雪崩光电二极管(QAPD)探测器作为光路反馈实现光路闭环控制。由于星间光通信的传输距离大、传输弛豫时间长,当两星间发生相对运动时,发送光束必须进行超前瞄准,以补偿卫星在光束弛豫时间内所发生的附加移动。超前瞄准角可以根据卫星的姿态速度和星历表提前计算出来,作为超前瞄准控制的命令信号。此功能由粗瞄准系统和精瞄微定位系统共同完成。
精瞄偏转镜作为精瞄微定位系统的执行机构,在捕获、跟踪和瞄准任务中起着至关重要的作用。特别是精瞄偏转镜的固有频率将直接决定精瞄微定位系统的动态性能。
精瞄偏转镜采用四支压电陶瓷驱动,压电陶瓷呈环形分布,两两在同一条轴线,两条轴线相互垂直,压电陶瓷到两轴线交点的距离相同,同一轴线的两根压电陶瓷分别采用推/拉的工作方式使镜体绕另一轴偏转,这种差动设计保证了温度变化下的转角稳定性,同时有助于提高精瞄偏转镜动态性能。
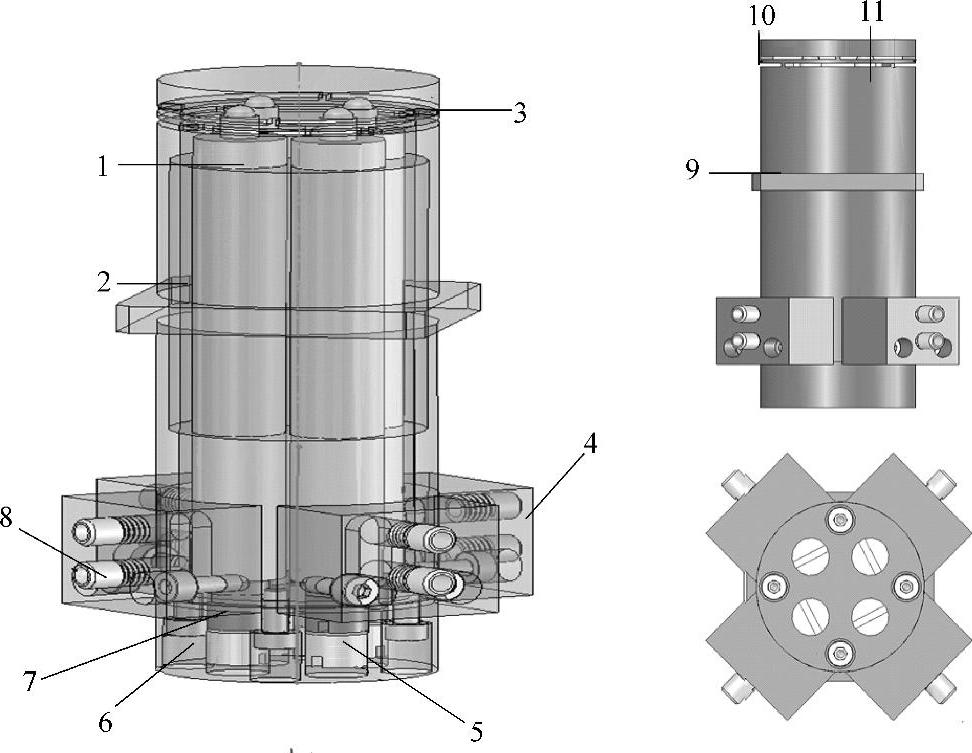
图9-47 精瞄偏转镜结构示意图
1—压电陶瓷支撑架 2—压电陶瓷 3—偏转圆台 4—出线座 5—锁紧顶丝 6—底座 7—预紧顶丝 8—出线护套 9—台体 10—镀金膜镜面 11—柔性环
机构由一整块合金钢通过电火花线切割工艺加工出铰链和柔性环。柔性环保证了零摩擦、零间隙和高导向精度。镀反射光金膜的偏转圆台通过等间距的四根铰链与柔性环连接,精瞄偏转镜台体也通过等间距的四根铰链与柔性环连接,上下两层铰链圆周分布相差45°。结构通过预紧顶丝对压电陶瓷提供预紧,在预紧顶丝的后面由锁紧顶丝提供对预紧顶丝的位置锁紧,保证了在振动环境下预紧顶丝的位置不会偏移,给压电陶瓷提供稳定的预紧力,保证了精瞄偏转镜的动态和静态性能。精瞄偏转镜的结构示意图如图9-47所示。精瞄偏转镜的运动方式有沿Z轴做升降运动、绕X轴和绕Y轴做偏转运动三种方式,在后继的动力学分析可以知道此三种运动方式为该精瞄偏转镜的三个主模态。
精瞄微定位控制系统以DSP芯片TMS320F206作为处理器,通过D/A转换电路压电陶瓷驱动模块连接,通过A/D转换电路与电阻应变式检测模块连接,通过EPP接口电路与上位机进行通信,如图9-48所示。
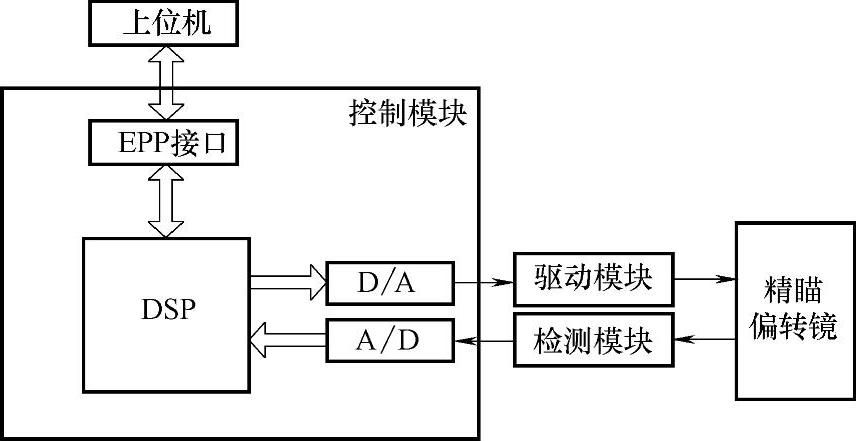
图9-48 精瞄微定位控制系统框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。