



(1)SCARA平面关节机器人
SCARA平面关节机器人在电子行业中常用此类机器人进行装配作业,因此又称其为装配机器人。这里介绍的SCARA机器人具有4个关节,3个旋转关节轴线相互平行,实现平面内定位和定向,1个移动关节,实现末端件升降运动,如图9-20所示。它比多轴定位平台的工作循环时间短很多,大大提高了工作效率。
SCARA机器人的主要部分结构介绍,如图9-21所示。
1)关节1:底座主要由底座和轴承两部分组成。底座材料采用铸铝,轴承采用可以承受轴向和径向力的十字交叉滚子轴承,谐波减速器03的钢轮固接在十字交叉滚子轴承02的一端,伺服电动机03通过电动机座安装在谐波减速器钢轮的另一端,通过伺服电动机驱动,从而带动和十字交叉滚子轴承02固接的大臂转动。
图9-20 SCARA机器人
2)关节2:采用铸铝材料,十字交叉滚子轴承01承受弯曲负载,保护了电动机。伺服电动机02输出直接驱动谐波减速器02转动,小臂和谐波减速器是固接的,所以小臂也随着电动机的转动而转动。
3)关节3:伺服电动机04通过同步带轮01转动,同步带轮01带动同步带及同步带轮02转动,同步带轮02驱动丝杠螺母转动,从而驱动丝杠的升降运动。
4)关节4:伺服电动机01驱动谐波减速器01,谐波减速器01通过同步带带动同步带轮03转动,同步带轮03驱动花键的转动,从而实现丝杠的旋转运动;如图所示结构简单紧凑,材料选择比较轻的铝合金,同时也可以满足设计要求。
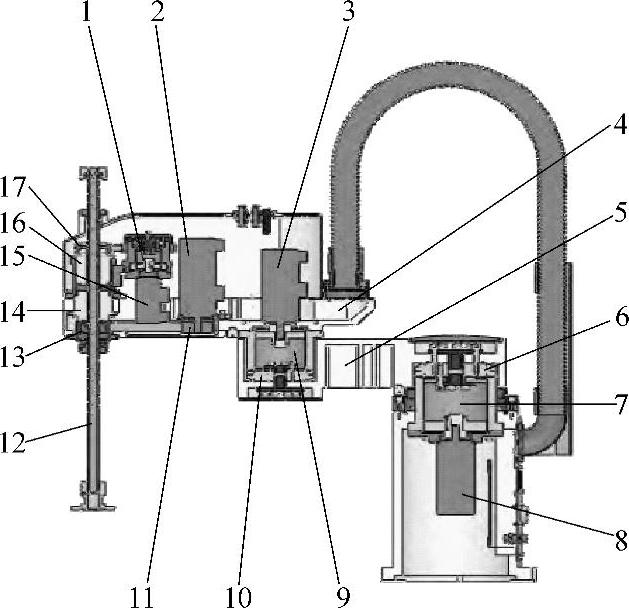
图9-21 SCARA机器人传动示意图(https://www.xing528.com)
1—谐波减速器01 2—伺服电动机04 3—伺服电动机02 4—小臂 5—大臂 6—十字交叉滚子轴承02 7—谐波减速器03 8—伺服电动机03 9—谐波减速器02 10—十字交叉滚子轴承01 11—同步带轮 12—丝杠 13—同步带轮 14—丝杠螺母 15—伺服电动机01 16—花键螺母 17—同步带轮
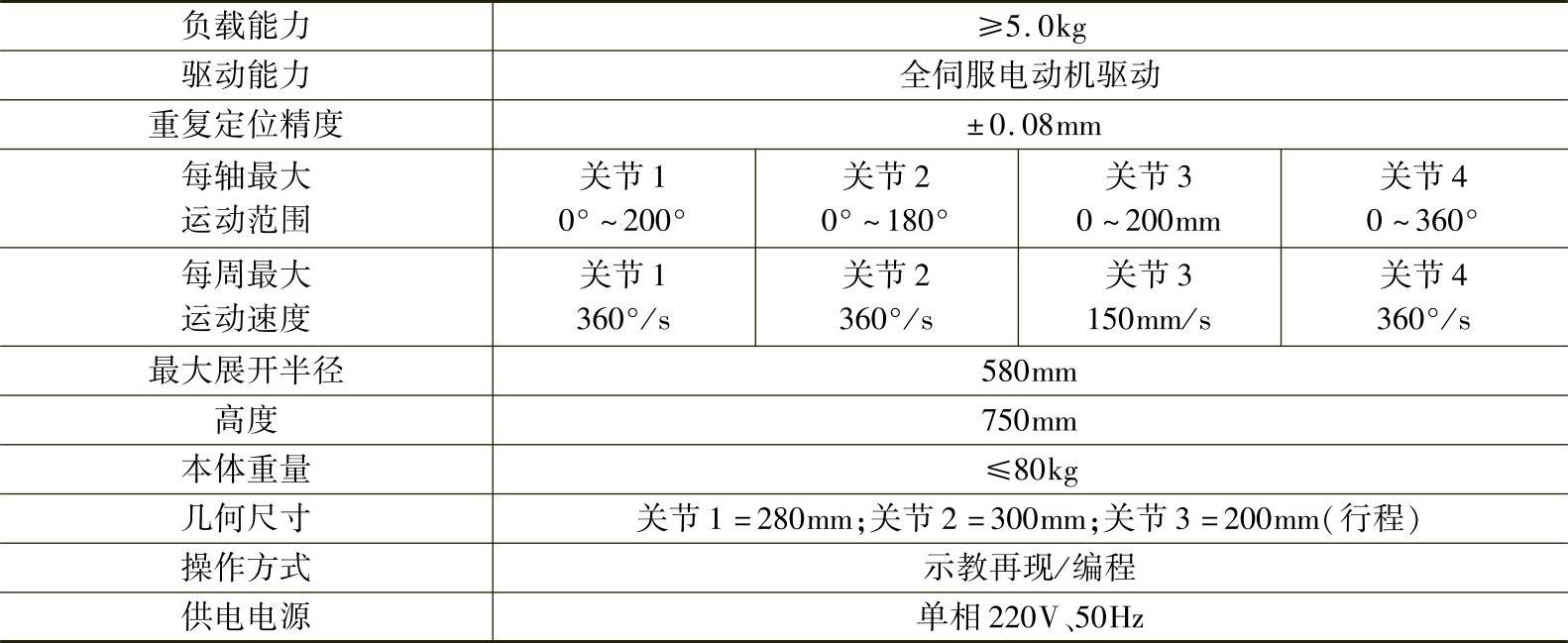
工业型四自由度SCARA机器人(RBT-4S02S)技术指标见表9-1。
表9-1 工业型四自由度SCARA机器人技术指标
(2)柔性制造系统
柔性制造系统是现代主流的先进自动化制造系统,由多个柔性加工单元组成,能够根据作业任务要求和现场环境变化迅速进行重组和调配,以适应多品种、中小批量的生产作业。它包括自动搬运系统、数控加工系统、物料仓储系统、信息采集系统和计算机控制系统等部分。各个设备可以单独运行和调试,开放软件源程序,并配套了图像化人机交互界面。该系统有助于学生从整体角度掌握机电一体化设备的应用开发和综合集成技术。下面以苏州博实机器人技术有限公司研究开发的工业型柔性制造系统(B型)为例,该柔性系统主要用于高校实验教学,其作业流程图如图9-22所示。
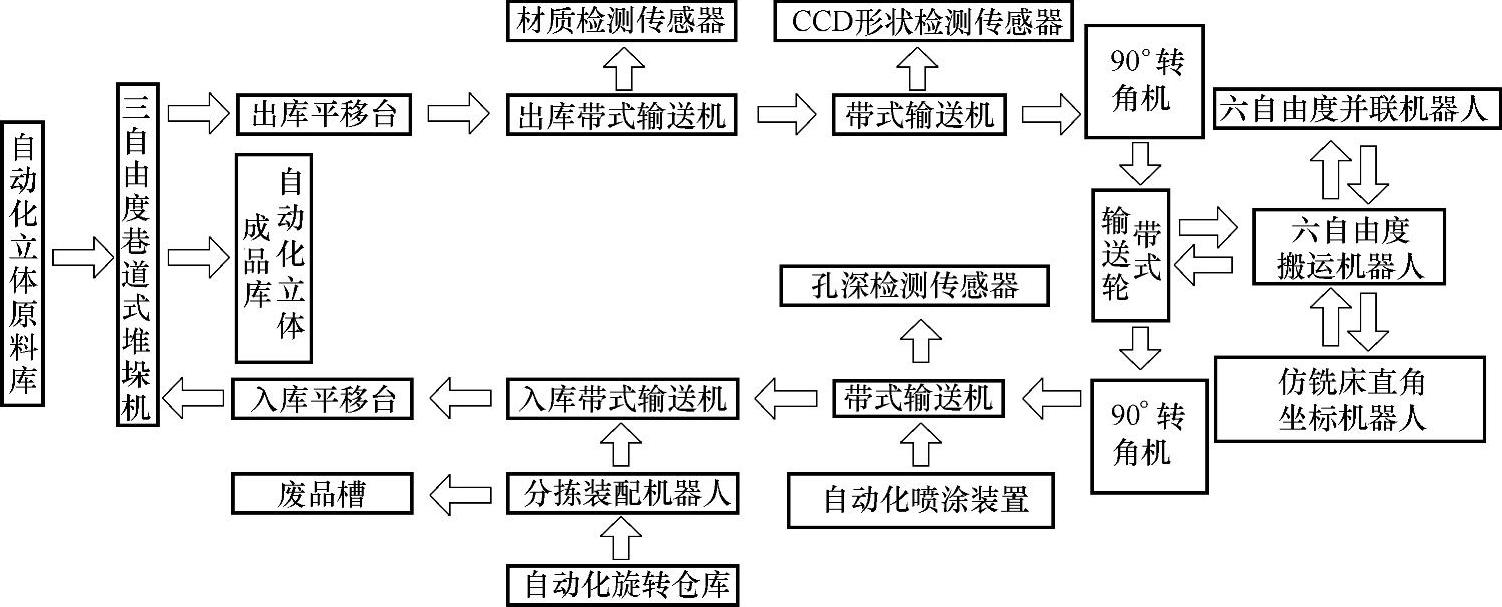
图9-22 工业型柔性制造系统(B型)作业流程图
该柔性自动化系统可开设的试验内容包括:①柔性制造系统的建模与仿真技术;②工业机器人技术应用;③自动码垛机技术和应用;④传感器技术和应用;⑤VC、VB高级语言编程;⑥PLC系统在工业现场的应用;⑦交流伺服电动机、步进电动机的认识;⑧交流变频技术的应用;⑨计算机网络通信技术和现场总线技术;⑩计算机控制;(11)数据库技术;(12)多轴运动控制器;(13)气动技术;(14)机器视觉技术与应用;(15)数控加工技术。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。