



自从1962年美国研制出世界上第一台工业机器人以来,机器人技术及其产品发展迅速,世界平均年增长率在10%左右,2008年全球新安装机器人的数量达到11.3万多套,中国对工业机器人的需求与日俱增,市场规模到达了1万台以上,年增长率在30%以上。目前,工业机器人主要应用于汽车制造、机械制造、电子器件、集成电路、塑料加工等领域中较大规模生产企业,其中应用工业机器人最广泛的领域是汽车及汽车零部件制造业。德国制造业每万名工人中拥有工业机器人162台,汽车行业则为1140台/万人;意大利制造业每万名工人中拥有工业机器人123台,汽车行业则高达1600台/万人。
本书着重介绍几个工业上使用较多的机器人。
(1)点焊机器人
点焊机器人由机器人本体、计算机控制系统、示教盒和点焊系统几部分组成,由于为了适应灵活动作的工作要求,通常点焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。其驱动方式有液压驱动和电气驱动两种。其中电气驱动方式具有保养维修简便、能耗低、速度高、精度高、安全性好等优点,因此应用较为广泛。点焊机器人按照示教程序规定的动作、顺序和参数进行点焊作业,其过程是完全自动化的,并且具有与外部设备通信的接口,可以通过这一接口接受上一级主控与管理计算机的控制命令进行工作。使用点焊机器人最多的应当属汽车车身的自动装配车间,如图9-13所示。
(2)弧焊机器人
弧焊机器人是用于进行自动弧焊的工业机器人,如图9-14所示。弧焊机器人的组成和原理与点焊机器人基本相同,一般的弧焊机器人是由示教盒、控制盘、机器人本体及自动送丝装置、焊接电源等部分组成。可以在计算机的控制下实现连续轨迹控制和点位控制。还可以利用直线插补和圆弧插补功能焊接由直线及圆弧所组成的空间焊缝。弧焊机器人主要有熔化极焊接作业和非熔化极焊接作业两种类型,具有可长期进行焊接作业、保证焊接作业的高生产率、高质量和高稳定性等特点。
(3)搬运机器人
搬运机器人是可以进行自动化搬运作业的工业机器人,如图9-15所示。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。目前世界上使用的搬运机器人被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运以及集装箱等的自动搬运。

图9-13 自动装配车间点焊机器人

图9-14 弧焊机器人

图9-15 搬运机器人
(4)装配机器人
装配机器人是柔性自动化装配系统的核心设备,由机器人操作机、控制器、末端执行器和传感系统组成。常用的装配机器人主要有可编程通用装配操作手(即PUMA机器人)和平面双关节型机器人(即SCARA机器人)两种类型。与一般工业机器人相比,装配机器人具有精度高、柔顺性好、工作范围小、能与其他系统配套使用等特点,主要用于各种电器的制造行业及汽车制造业,如图9-16所示。(https://www.xing528.com)
(5)喷涂机器人
喷涂机器人又称喷漆机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人,如图9-17所示。多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。较先进的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。喷漆机器人一般采用液压驱动,具有动作速度快、防爆性能好等特点,可通过手把手示教或点位示数来实现示教。喷漆机器人广泛用于汽车、仪表、电器、搪瓷等工艺生产部门。

图9-16 装配机器人

图9-17 喷涂机器人
(6)抛光机器人
抛光机器人(图9-18)系统由机械本体、高精度伺服转台、组装机器人控制系统、厚度检测系统组成,能对不同外形尺寸的加工件施行高质量、高精度的研磨抛光,并且可以完成厚度检测和机器人处负载力和力矩的检测,以维护工件和提高抛光质量。
(7)并联机器人
从广义机构学的角度出发,只要是多自由度的,驱动器分配在不同环境上的多环路机构都可称之为并联机构,如图9-19所示,如步行机器人,多指手爪等。并联机器人主要应用在作模拟器,如运动、飞行、地震、舰船、汽车、火车等;用作操作器,如空间对接机构、潜艇救援、土方挖掘、煤炭开采、医疗外科等;用作微动机构和微型机构,如显微外科、细胞操作、误差补偿器;用作加工设备,如虚拟轴机床,很容易获得6轴联动;DELTA型并联机器人用作分拣包装。
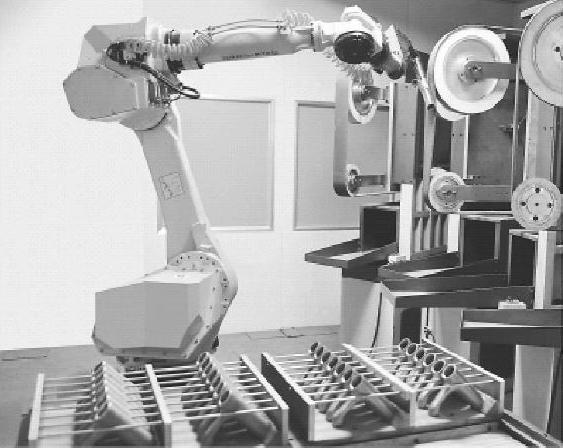
图9-18 抛光机器人

图9-19 并联机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。