



工业机器人是一种能够模拟人的手、臂的部分动作,按照预定的程序、轨迹及其他要求,实现抓取、搬运工件或操纵工具的自动化装置,是具有发展前途的机电一体化典型产品,将在实现柔性自动化生产、提高产品质量并代替人在恶劣环境条件下工作中发挥重大作用。
工业机器人手臂的主要作用是在三维空间内定位,为此,如前所述必须要3个自由度。这样的自由度构成法,若考虑平移、旋转、回转3种自由度的组合,则共计存在27种,根据它的动作形态,代表性的自由度构成可以分成下面几种:

图9-4 直角坐标型机器人
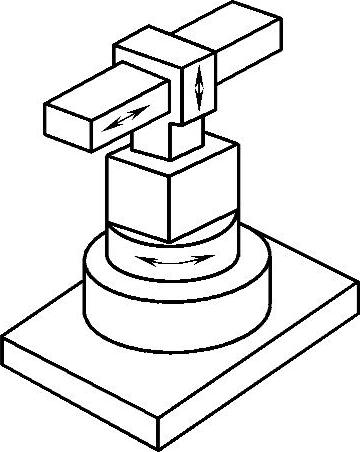
图9-5 圆柱坐标型机器人
(1)直角坐标型
如图9-4所示,是三个直角坐标轴,与机床相似,按直角坐标形式动作。其结构特点为在直角坐标空间解耦,空间轨迹易于求解,易于实现高度定位精度,当具有相同的工作空间时,本体所占空间较大,这也是大多数数控设备采用这种结构形式的原因。
(2)圆柱坐标型
如图9-5所示,按圆柱坐标形式动作。其结构特点为在圆柱坐标空间内解耦,能够伸入型腔式空间;相同工作空间,本体所占空间体积比直角坐标式要小,但直线驱动部分密封、防尘较难。
(3)球坐标型
如图9-6所示,也称极坐标型,按球坐标形式动作。其结构特点:是一个直线坐标轴和两个回转轴,所占空间体积小,机构紧凑;往往需要将极坐标化成我们习惯的直角坐标,轨迹求解较难;直线驱动同样存在密封、防尘问题。(https://www.xing528.com)
(4)关节型
如图9-7所示,所谓关节就是运动副,由于关节型机器人的动作类似于人的关节,故将其运动副称为关节。一般的关节指回转运动副,但关节机器人中有时也含有移动运动副,为了方便,可统称为关节,包括回转关节和直线运动关节。其结构特点为灵活性好,工作空间范围大(同样占地面积情况下),但刚度和精度较低。
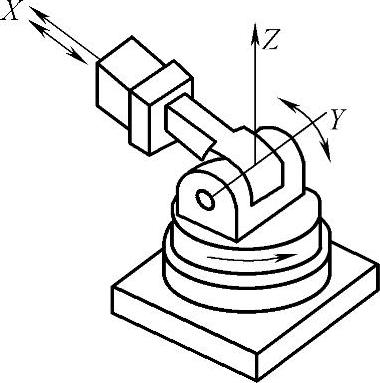
图9-6 球坐标型机器人
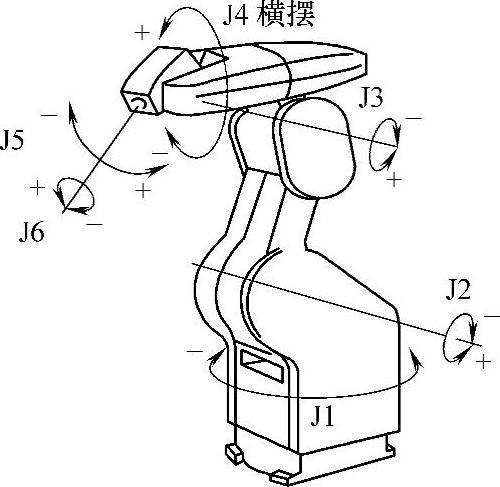
图9-7 关节型机器人
(5)并联型
上述几种构型均属于串联机器人结构。一段时间里,工业中串联机构的机器人一直占主导地位,它结构简单,工作空间大,位置分析中正解比较容易,因而获得广泛的应用。但随着科学技术的发展和研究领域的不断拓宽,人们发现了一类全新的机器人——并联机器人。上下平台用两个或两个以上分支相连,机构具有两个或两个以上的自由度,且以并联方式驱动的机构称为并联机器人,常见构型如图9-8所示。它具有刚度大、承载能力强、误差小、精度高、自重负荷比较小、动力性能好、控制容易等一系列优点,与目前广泛应用的串联式机器人在应用上构成互补关系,因而扩大了整个机器人的应用领域。
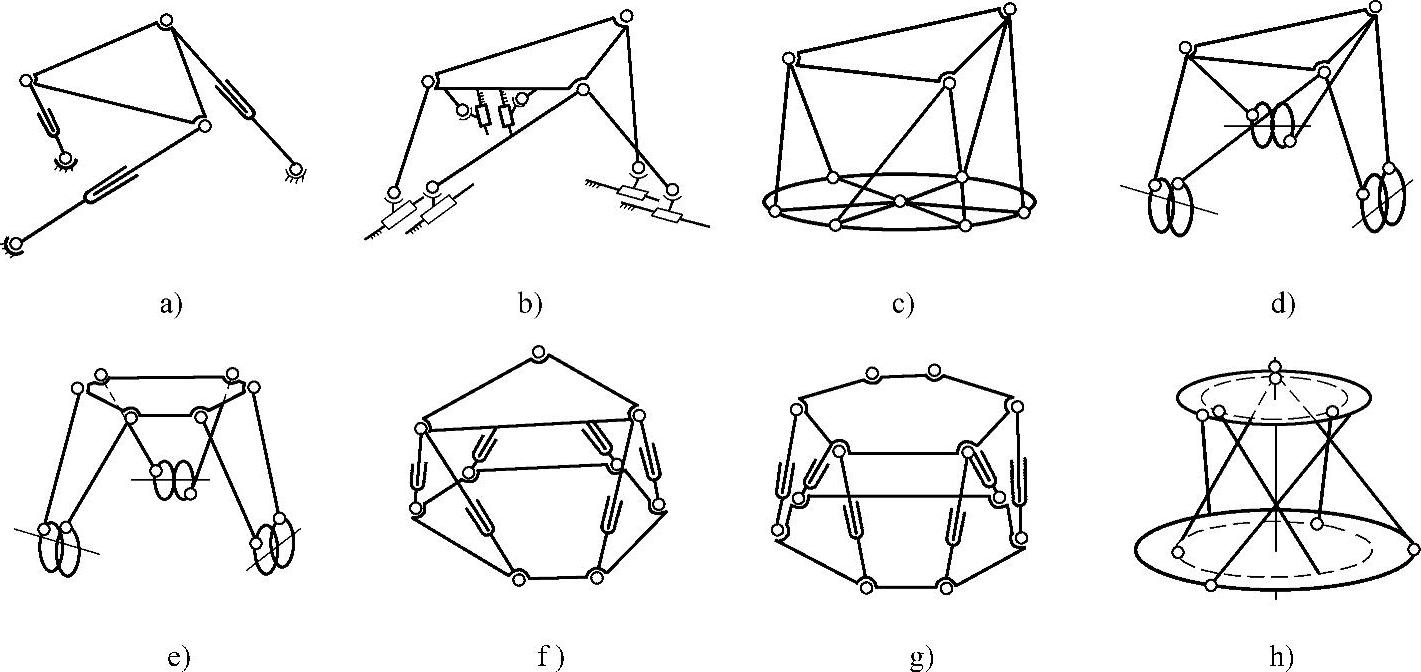
图9-8 并联机器人的机械结构类型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。