



工业机器人的组成大体上可分成四大部分,即执行机构、驱动单元、控制系统、感知和反馈系统,具体组成如图9-1所示。执行机构按控制系统的指令进行运动,动力由驱动系统提供,各部分关系如图9-2所示。
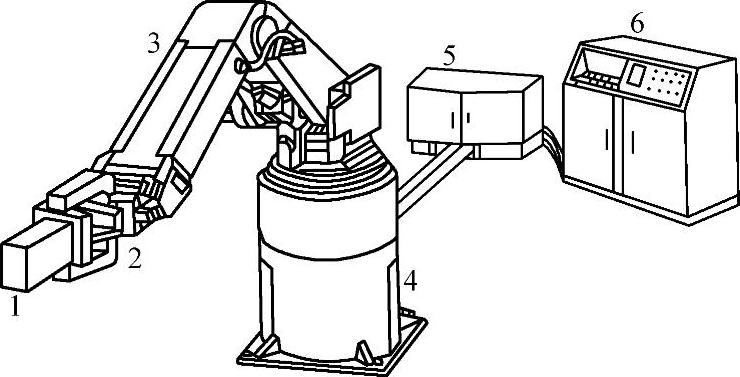
图9-1 机器人的组成
1—工件 2—机械手 3—机械臂 4—气动装置 5—驱动系统 6—计算机控制系统
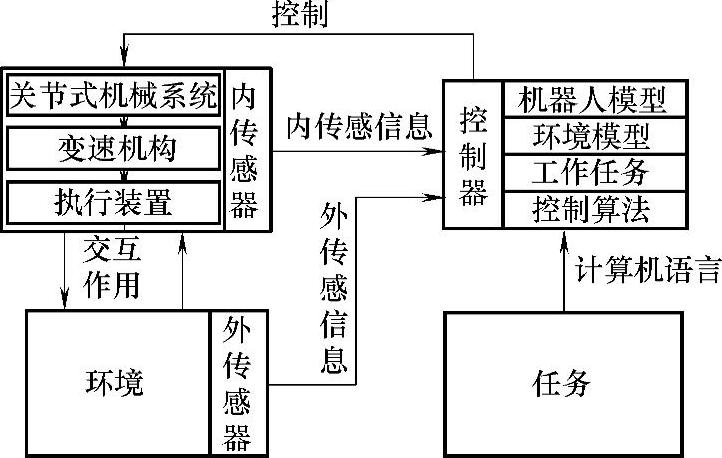
图9-2 各部分相互关系
机械系统又叫操作机,是工业机器人的执行机构。它可分成基座、手臂、手腕和手部,如图9-3所示。分析时,一般将操作机简化为由连杆、关节和末端执行件组成。组成工业机器人操作机的连杆和关节,按其功能可以分成两类:一类是组成操作机手臂的长连杆,也称臂杆,产生主运动,是操作机的位置机构;另一类是组成手腕的短连杆,它实际上是一组位于臂杆端部的关节组,是操作机的姿态机构,确定了末端执行件在空间的方向。连杆首尾相连,通过关节相连,构成一个开式连杆系,在连杆系的开端安装末端执行件。(https://www.xing528.com)
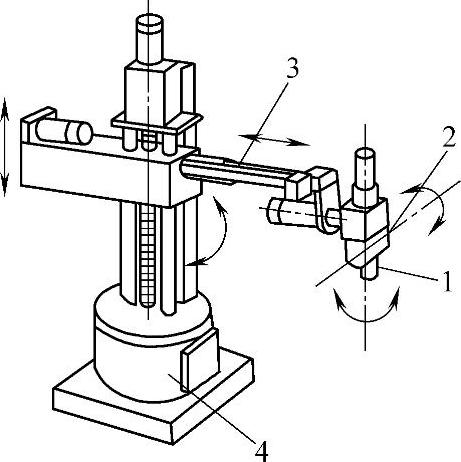
图9-3 机器人机械结构组成
1—手部 2—手腕 3—手臂 4—机座
机器人的驱动系统,按动力源可分为液压、气动和电动三种基本类型,根据需要也可将这三种类型组合成复合式的驱动系统。近年来,随着特征用途机器人如微型机器人的出现,动力来自压电效应、超声波、化学反应的驱动系统相继出现。交、直流伺服电动机具有起动力矩大、惯量小等优点,很适合机器人驱动系统的要求。因此,目前在抓重100kg以下的机器人中多采用电动驱动系统控制系统实现对操作机的控制。它通过控制各关节运动坐标的驱动器,使各臂杆端点按要求的轨迹、速度和加速度运动,并通过协调各臂杆的运动,或使末端执行件按指定的路径运动,或使其到达空间指定的位置,并满足正确的取向要求。为完成指定的作业,在工作过程中,控制系统还必须实现操作机和周边设备间的信息交流和工作协调。
感知和反馈系统共同作用实现工业机器人的智能化。前者主要是传感器组,后者靠运动软件实现。感知技术是通过各种传感器获取工作环境信息,这样才能捕捉不断变化的实际情况,进行任务规划和自主控制,最终实现目标要求。机器人所用的传感器按功能可细分为外部传感器和内部传感器两类。内部传感器用于检测控制系统中涉及的变量,而外部传感器则涉及到视觉传感技术,要使用视觉的设备及视觉信息处理技术。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。