



(1)仅有位置反馈在图6-48所示的天线控制系统中,若将开关S接在B上,可成为简单的位置反馈控制系统,该系统的方框图和传递函数已在图6-50b中给出,下面重新在图6-57中表示。
和速度控制的情况一样,通过研究该系统的根轨迹,了解增益系数Ka对该系统的影响。利用计算机画出对应的根轨迹如图6-58所示。该位置控制系统为三阶系统,所以存在相应的三个特征根、三条根轨迹。第一条以-10为出发点,沿实轴向左延伸;第二、三条分别从原点向右上和右下方向延伸。
由图6-58表示的根轨迹可得出下列重要的结论:
1)从原点出发的二条根轨迹总是位于平面的右半部,该系统对任何Ka值都是不稳定的。
2)图6-48所示的天线的位置控制结构不能很好地工作。为了实现满足稳定的要求,达到在6.4.5节中给出的控制指标,必须采用必要的对策。
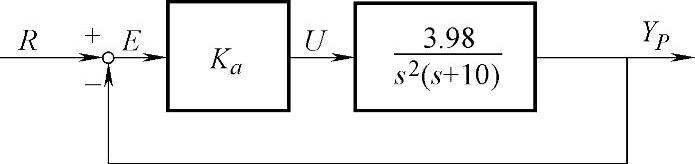
图6-57 位置控制系统的方框图
Ka—放大器的放大率(增益) R—希望速度的基准输入 E—偏差信号(与目标值的偏差) U—对电动机的输入量 YP—天线位置的输出信号
同样的控制结构,为什么在速度控制时是稳定的,而在位置控制的情况下就成为不稳定的呢?
请看图6-59,该系统通过给DC电动机施加的电压u来控制天线的速度或位置。DC电动机产生对应电压u的转矩τ,使减速齿轮、天线旋转系统转动。该转矩与天线的角加速度成正比。天线的转速是通过对角加速度的时间积分得出的,而位置是通过对速度在时间上的再次积分得出的。因此控制位置比通过施加转矩控制速度要难。这就是用单纯的控制结构进行控制时,速度控制能稳定工作,位置控制却不能很好工作的原因。
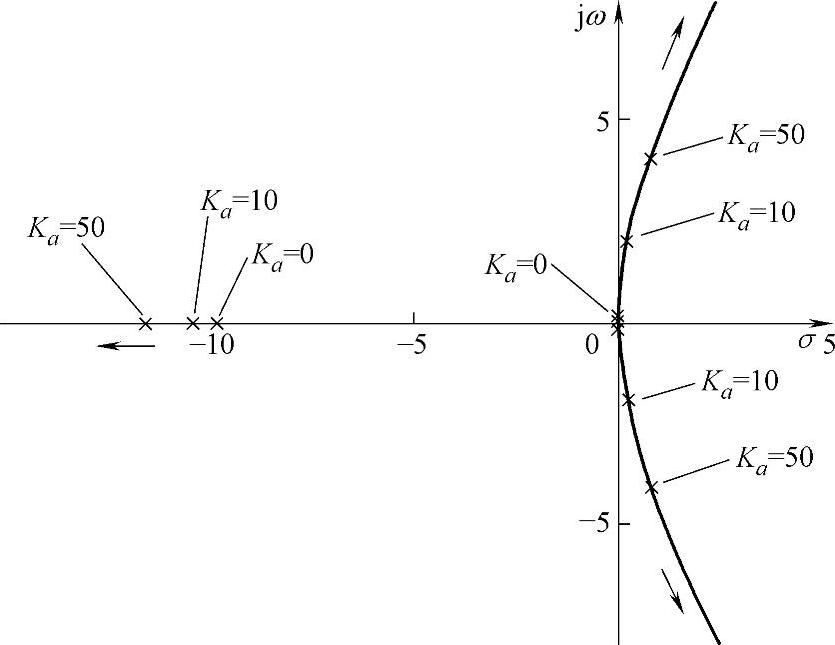
图6-58 图6-57位置控制系统的根轨迹
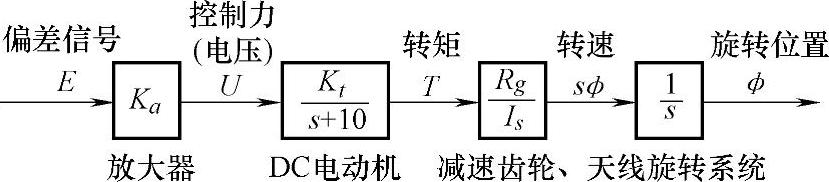
图6-59 从控制力U到天线位置Φ的信号传递
那么怎样才能实现既稳定又满足指标的位置控制系统呢?考虑各种方法之后,我们介绍下面一种位置控制的设计方法。
(2)位置+速度的反馈
图6-57所示位置控制系统的反馈信号只是检测位置输出YP。现在讨论反馈信号中不仅有位置输出YP,而且有速度输出信号Yv的情况。图6-60就是位置+速度反馈信号的组成法。将来自天线的位置检测用电位器的信号YP和速度检测用测速传感器的输出端连在一起,然后从这个分压电路接点上取出信号进行反馈。图中表示接点位置的α为速度检测信号Yv与位置检测信号YP的比例系数(0≤α≤1),当α=0时,仅对位置检测信号YP进行反馈;当0<α≤1时,位置检测信号YP和速度检测信号Yv共同决定反馈信号f,这时的反馈信号f表示为:

将上式进行拉普拉斯变换,用YP表示为:
f=CPφ+αCvRgsφ=CPφ(1+αCvRgs/CP)=YP(1+αCvRgs/CP)
参照6.4.2小节将具体参数代入上式有:
F=YP(1+3αs) (6-20)
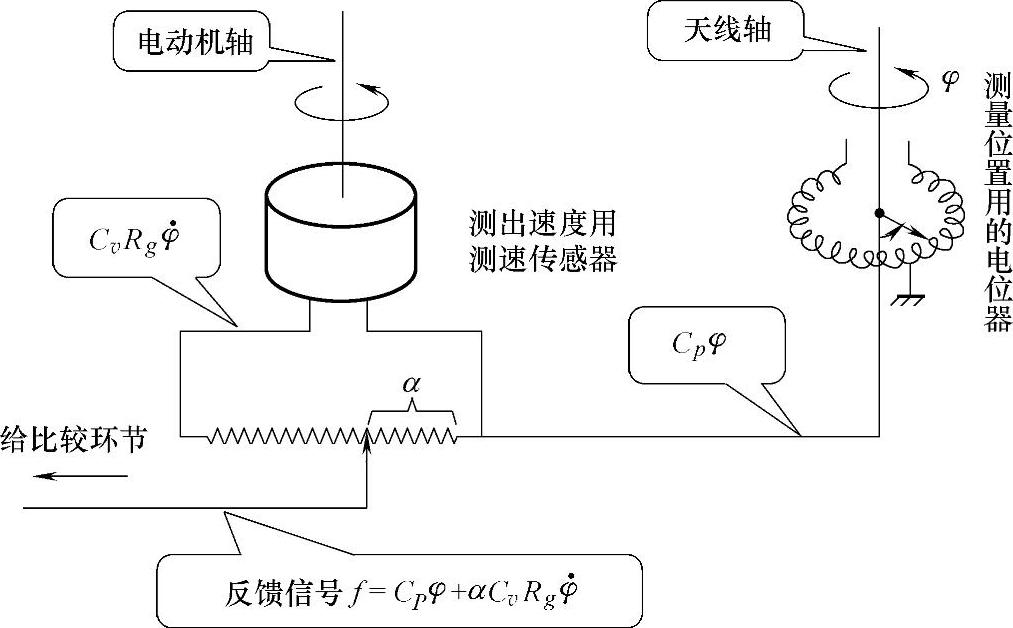
图6-60 位置+速度的反馈信号
(3)方框图和特征方程
采用上述反馈信号的位置控制系统方框图如图6-61所示。
将此图同前面单纯的位置反馈控制系统方框图6-57比较,前面的情况是直接连接的反馈,而后者是在反馈回路中插入了传递函数H(s)=(1+3αs)。具有反馈传递函数H(s)的控制系统特征方程为1+G(s)H(s)=0,所以该系统的特征方程为:

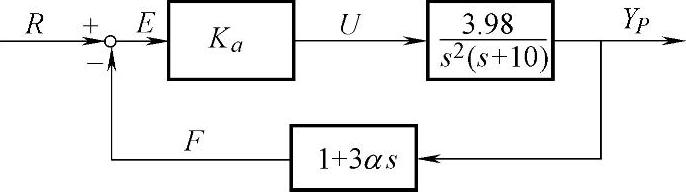
图6-61 位置+速度反馈的天线位置控制系统的方框图
R—基准输入 E—偏差信号 U—对电动机的输入量 YP—天线位置的检测信号 F—位置+速度的反馈信号 α—速度与位置的比例系数(0≤α≤1)(https://www.xing528.com)
在反馈信号中,速度反馈信号是以表征附加程度的加权系数α的形式包含在位置反馈信号中的。在用计算机计算根轨迹之前,对上列特性方程式所具有的特性作一分析。
根轨迹从G(s)H(s)的极点(分母为零的根)出发,其零点(分子为零的根)向无限远处延伸。因此,从式(6-21a)看,该系统的根轨迹,一条从-10出发,另二条从原点出发,一条面向-1/(3α),另两条面向无限远。在这里,当极点(-10)和零点(-1/(3α))一致时,即α=1/30的时候,根轨迹会是怎样的呢?令α=1/30,将特征式(6-21b)做如下因式分解:
(s+10)(s2+0.398Ka)=0 (6-22)
则α=1/30时的特征根为:

此时根轨迹的一条退化到-10的一点,另两条沿虚轴移动,因此,α=1/30时系统为临界稳定状态。
另外当α=0时,仅进行位置反馈,与已分析的图6-57所示系统一样,其根轨迹如图6-58所示,则该系统为不稳定系统。
综上所述,该控制系统在α=0时不稳定,在α=1/30时为临界稳定。从这个结果进行推测,α>1/30时该控制系统是稳定的。
(4)随系数α变化的根轨迹
根据式(6-21),用计算机对各种α值的根轨迹进行计算的结果概略归纳为图6-62。图6-62a中α=0时,反馈信号只是位置检测信号,同前面图6-58的根轨迹相同。图6-62b中α=1/30时,根轨迹位于虚轴上,表示该系统对所有的Ka都是临界稳定的。而图6-62c~图6-62f所示,在α=1/12、1/6、1/3、1时,根轨迹全都在复平面的左半平面。正如事先预想的那样,α>1/30时,控制系统是稳定的。在图6-62f中α=1时,作为反馈信号,在位置检测信号中速度检测信号保持原样,其根轨迹除原点附近,有同图6-54所示的速度控制根轨迹非常相近的图形,这是十分有意思的事。
那么,在图6-62c~图6-62f所示稳定控制系统的根轨迹中,在什么情况下能尽量使三个特征根的负实部的绝对值全都变大呢?与α=1/12的图6-62c相比,α=1/6的图6-62d比较好一些。那么,图6-62d和图6-62e哪一个又比较合适呢?为了判断,我们画出了α=1/6和α=1/3时的根轨迹图,即图6-63和图6-64。
α=1/6的图6-63中可以看到随着Ka按20、25、30增加,沿从原点延伸的根轨迹的二个特征根的实部绝对值也渐渐增大,而在实轴上从-10向原点延伸的特征根的实部的绝对值却减小了。从图中还可领会到,三个特征根实部在Ka=25~30时都有相同程度的值,其值在-3.5~-4之间。
在α=1/3的图6-64中可看到稍微复杂的根轨迹形状。从原点出发的两个特征根,开始在圆周上移动,在-2.5处左右合并后,在实轴上左右分开移动。另一方面,从-10出发的特征根开始在实轴上往右移动,与在-2.5处往左移动的特征根在-4附近合并之后上下分开移动。依Ka=7、8、9的三个特征根位置可知,在这种情况下,三个特征根中至少有一个实部的绝对值在2.5以下。因此,结论是α=1/3时比α=1/6时的稳定度稍低。
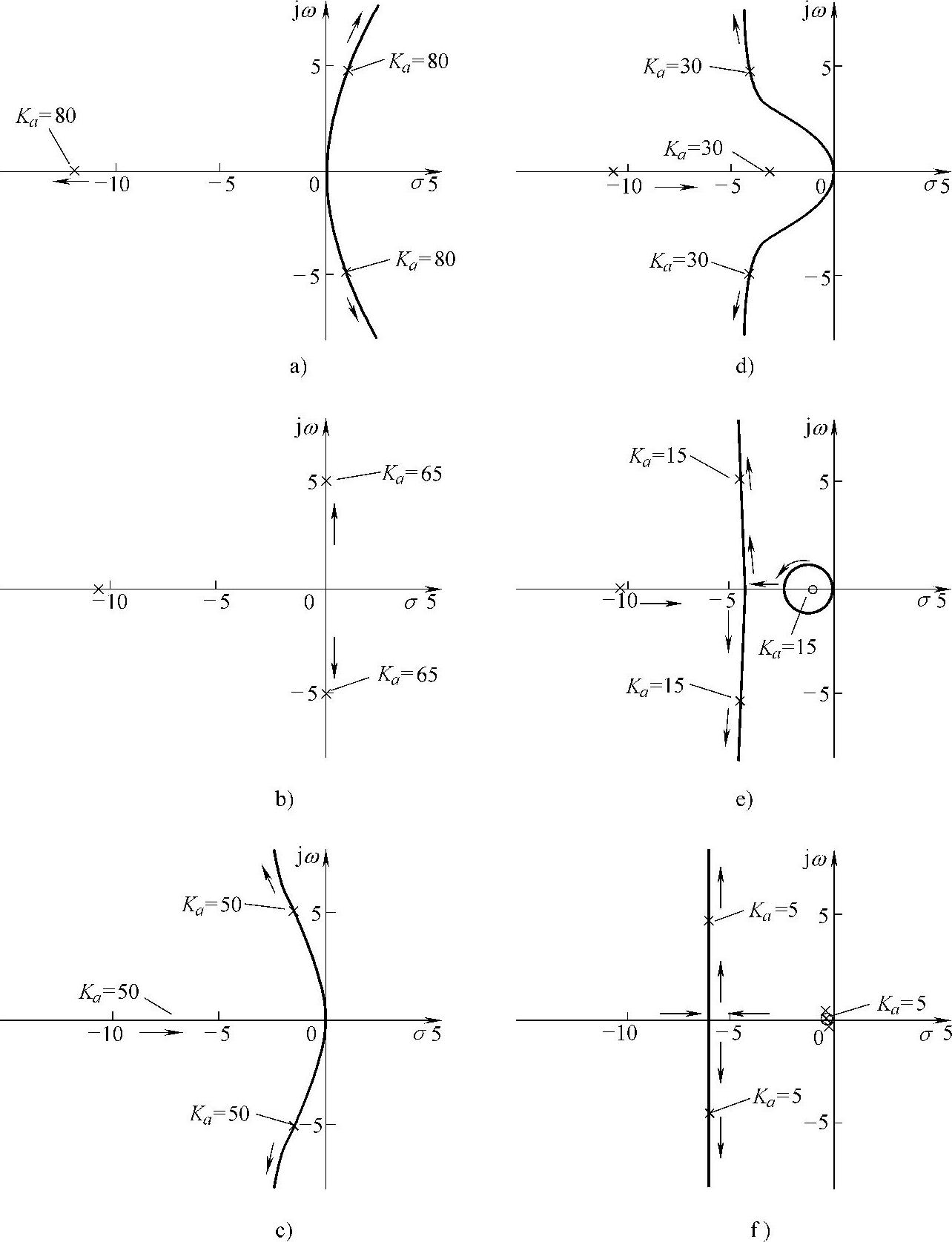
图6-62 对应不同系数α值的根轨迹
a)α=0不稳定 b)α=1/30临界稳定 c)α=1/12稳定 d)α=1/6稳定 e)α=1/3稳定 f)α=1稳定
以上通过对各种α的根轨迹的比较,可使我们了解到实现稳定性最佳的控制系统是在α=1/6时的系统,即在将增益系数设定在Ka=25~30的范围。
下面我们用仿真的方法来搞清楚该控制系统能否满足6.4.5节给出的性能指标。
(5)用仿真法确认性能指标
图6-65为反馈信号在位置检测信号中加入速度检测信号的1/6(α=1/6)的情况下,把增益系数分别设定在Ka=15、20、25、30、40时,对阶跃输入的天线位置时间响应的仿真结果。将该时间响应同图6-63的根轨迹作对比。另外在图6-65中,给出了满足6.4.5节给定的控制性能指标的基准。
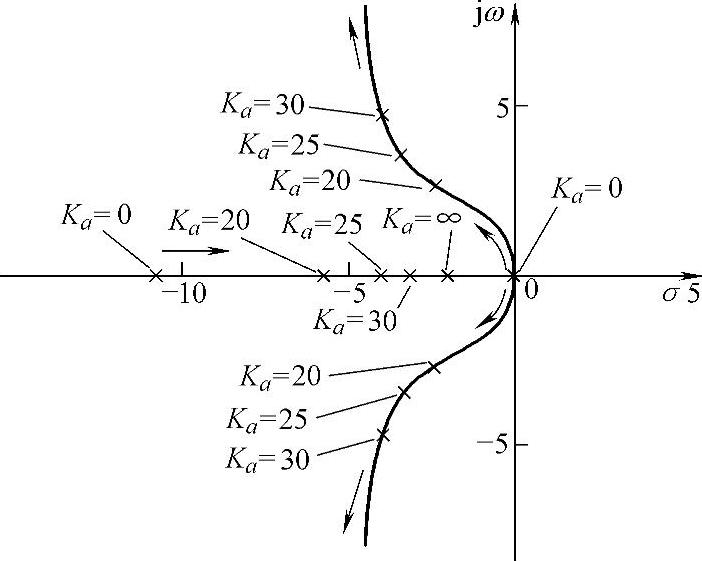
图6-63 α=1/6时的根轨迹
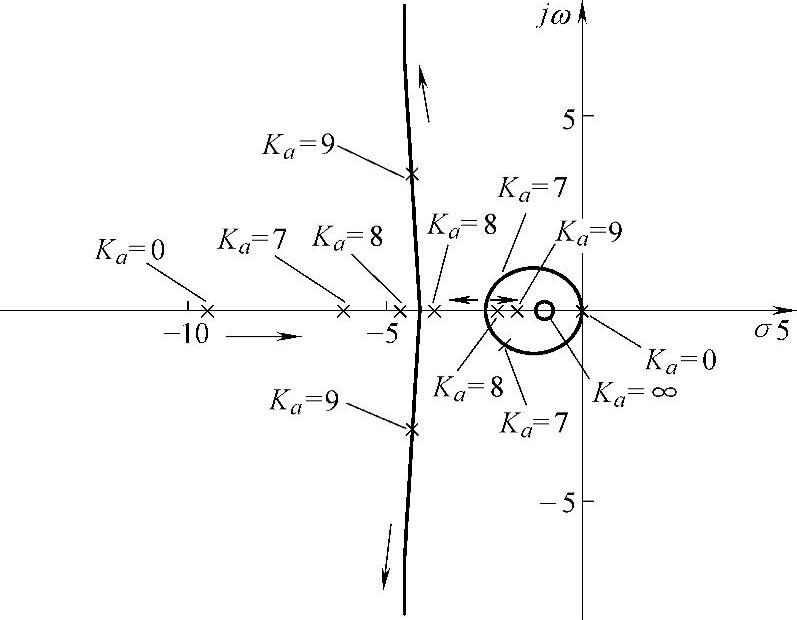
图6-64 α=1/3时的根轨迹
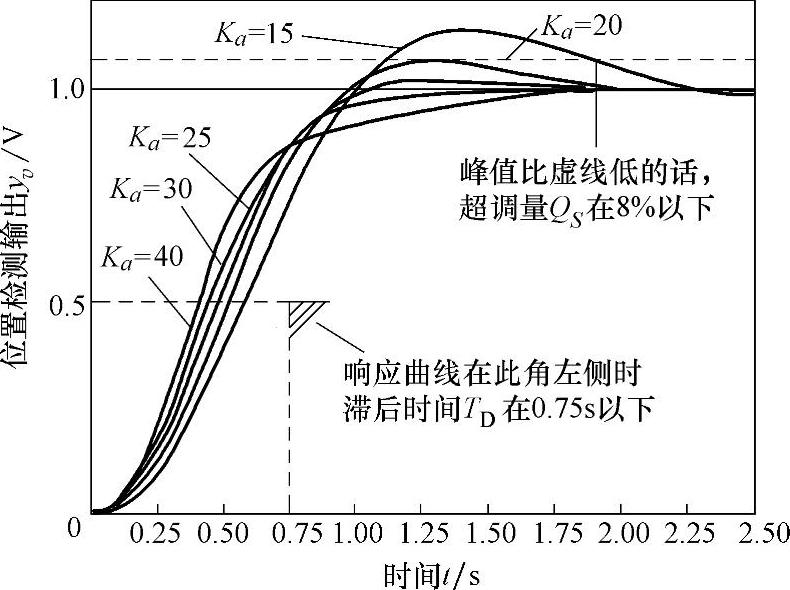
图6-65 α=1/6时的输出响应和性能指标
首先,对1V的阶跃输入(天线的角度相当于180°÷5=36°)的位置响应进行检测,随着时间的递进,所有的位置检测的输出响应都将收敛为1V,表明该系统是稳定的。而且对阶跃输入的稳态误差为0。因此,所有的Ka值可满足6.4.5节中控制指标1。控制目标2、3是关于超调量和滞后时间的性能指标。Ka=15的响应满足不了超调量Os在8%以下这一要求。Ka=20、25、30、40的响应可以满足超调量在8%以下的控制指标2以及滞后时间在0.75秒以下的控制指标3。但是,Ka=40的响应达到稳态的时间比其他的时间长。图6-65所示的响应中,最优的是Ka=25的响应,同图6-62根轨迹法的研究结果一致。
本节以雷达天线的速度控制和位置控制为例,具体说明了单输入、单输出控制系统基本的设计手法,即首先建立系统的数学模型,然后求传递函数,用方框图表示系统,而后运用根轨迹法与仿真法找出能满足给定性能指标的控制系统。另外,在位置控制中,只有位置反馈时,系统不稳定,作为其对策,将速度信号加入位置信号中作为反馈信号,成功地解决了问题。
另外,在基于传递函数的控制系统设计法中,作为除根轨迹法以外经常使用的方法有基于Bode图的方法和Nyquist图的方法等。而作为校正控制系统,使不稳定的控制系统稳定的方法,除在本节举例使用的反馈补偿(为改善控制系统而调整反馈信号)法外,在比较环节后面串联校正环节的方法也被经常使用。大家熟悉的校正环节有PID(比例+微分+积分)电路和相位超前及相位滞后校正电路。限于篇幅,本书对控制系统的各种分析和设计方法的介绍仅限于特定的几种方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。