



在设计控制系统时,首先应确定使用目的和应达到的性能指标。下面给出雷达天线的转速控制指标及位置控制指标。
指标1:对单位阶跃输入的稳态误差Es为0。
指标2:超调量Os在8%以内。
指标3:滞后时间Td在0.75s以下。
图6-51对稳态误差Es(steady state error)、超调量Os(overshoot)和滞后时间Td(delay time)做了说明。
所谓稳态误差Es就是在系统输入后经充分时间,系统达到平稳状态时,输入和输出之间的误差。稳态误差指标为0,是指最终使系统的输出与输入一致。指标1即是对于控制系统稳态特性的要求。
所谓超调量Os是指阶跃输入响应的最大值和最终值之差,用相对最终值的百分率表示。超调量大,控制系统产生振动大,稳定性不好。指标2即是对于控制系统稳定性的要求。
所谓滞后时间Td是指阶跃输入响应达到最终值的50%时所需的时间。滞后时间长,输出值达到最终值的时间也长,指标3即是对于控制系统快速性的要求。(https://www.xing528.com)
以上提到的控制指标,规定了今后设计控制系统的特性,被称为性能指标(Per-formance Specification)。在实际控制系统的设计中,有必要对这种性能指标的选择进行充分研究。对性能指标要求的严格程度涉及控制的复杂性、控制系统的有用性及得到的满足程度,可用图6-52所示的曲线表示。
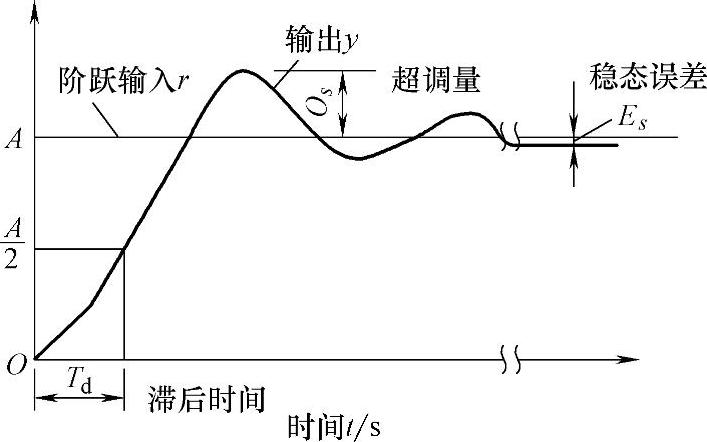
图6-51 稳态误差、超调量和滞后时间
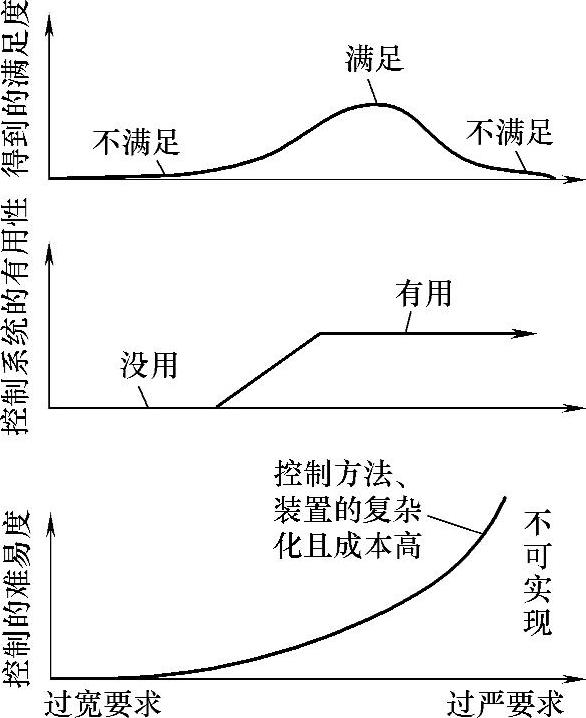
图6-52 性能指标的选择和得到的满足度
随着性能指标的提高,控制方法和装置的复杂性等也增大。指标过于严格的控制系统是不可能实现的。过分严格地给定性能指标将造成费力太多、所得很少的局面,表示这种关系的曲线称满足度曲线。从图6-52所示可知性能指标最好选择在能保证控制系统有用性的下限附近。对于选择这样的性能指标,需要拥有对控制对象的深刻了解和较高的控制系统设计技术。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。