



【摘要】:下面首先确定系统方框图和各环节的传递函数。图6-49 雷达天线控制系统的方框图a)参照图6-48的原始方框图 b)部分环节合并后的方框图r—对应目标转速的基准输入 e—对应目标值的偏差信号 u—对应电动机控制力的操作量 y—对应天线转速或天线角位置的输出G是表达输入u和输出y之间关系的传递函数。图6-50 天线控制系统的传递函数和方框图a)天线的速度反馈控制系统 b)天线的位置反馈控制系统
下面首先确定系统方框图和各环节的传递函数。
图6-49所示为天线控制系统的方框图。设基准输入r在左端,检测输出y在右端,参考图6-48的构成,对图6-49a就容易理解了。图6-49b把电动机、天线旋转系统和检测器归结为一个环节。首先试求该环节的传递函数G(s)。
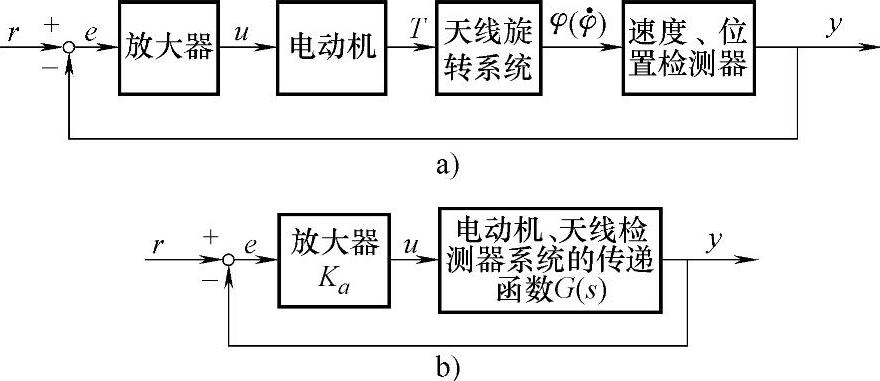
图6-49 雷达天线控制系统的方框图
a)参照图6-48的原始方框图 b)部分环节合并后的方框图
r—对应目标转速的基准输入(V) e—对应目标值的偏差信号(V) u—对应电动机控制力的操作量(V) y—对应天线转速或天线角位置的输出(V)
G(s)是表达输入u和输出y之间关系的传递函数。为求此传递函数,对式(6-8)~式(6-10)及式(6-13a)、式(6-13b)进行拉普拉斯变换。设所有的变量初始值为0,将拉普拉斯变换后的各变量改成大写形式为:
Is2Φ=RgT
T=KtIf
U=RfIf+LfsIf(https://www.xing528.com)
Yv=RgCvsΦ或Yp=CpΦ
消去上式中的中间变量Φ、T、If,得Yv和U或Yp和U之间的关系如下:
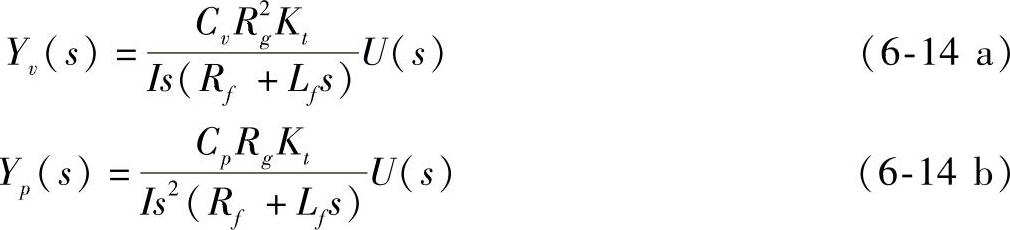
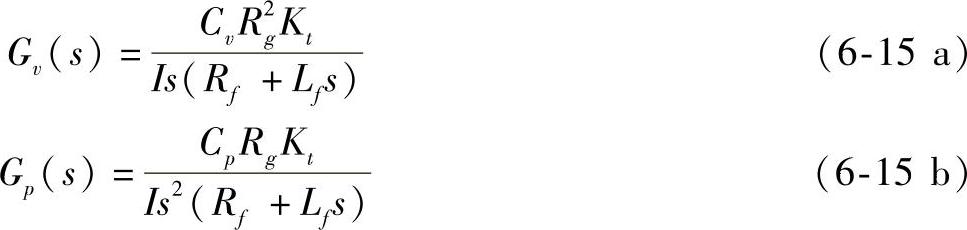
传递函数G(s)是输出和输入之比Y(s)/U(s),所以,从上式可得传递函数为:
将系统参数值代入这些传递函数,用方框图表示为图6-50,其中图6-50a表示天线的速度反馈控制系统,图6-50b表示天线的位置反馈控制系统。
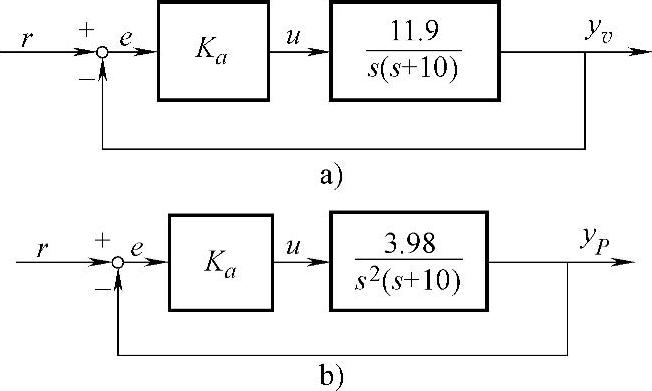
图6-50 天线控制系统的传递函数和方框图
a)天线的速度反馈控制系统 b)天线的位置反馈控制系统
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。