



由于步进电动机接收的是脉冲信号,因此步进电动机需要由专门的驱动电源供电。驱动电源的基本部分包括变频信号源、脉冲分配器和脉冲功率放大器,如图6-22所示。

图6-22 步进电动机驱动电源示意图
变频信号源是一个频率从几赫到几万赫连续变化的脉冲信号发生器。脉冲分配器的作用是根据运行指令把脉冲信号按一定逻辑关系分配到每一相脉冲放大器上,使步进电动机按选定的运行方式工作,一般由逻辑电路构成。从脉冲分配器输出的电流只有数毫安,不能直接驱动步进电动机,因此在脉冲分配器后需要连接功率放大器。功率放大器是每相绕组一套。
(1)脉冲分配器
脉冲分配器电路有多种方案:用普通集成电路实现;用专用集成电路实现;用微机实现等。
如图6-23所示为由普通集成电路组成的三相六拍脉冲分配器电路。图中C1、C2、C3为双稳态触发器(J-K触发器),其余为与非门。变频信号源的脉冲加到脉冲分配器的脉冲输入端,步进电动机的旋转方向由正向和反向控制电位决定。该电路的初始状态是C相导通。当在正向控制电位端加高电平,反向控制电位端加低电平时,在脉冲输入端输入第一个脉冲,双稳态触发器C1翻转。这时,电动机的A、C相同时导通,B相断电。第二个脉冲到来,触发器C3翻转。此时,A相通电,B、C两相断开。如果不断地输入脉冲,步进电动机绕组按C→CA→A→AB→B→BC→C…的顺序通电,转子按一个方向旋转。反之在反向控制端加高电平、正向控制端加低电平,电动机绕组按C→CB→B→BA→A→AC→C…的顺序通电,转子反向旋转。
脉冲分配器集成电路有CH250、PMM8713等。采用专用集成电路有利于降低系统成本和提高系统的可靠性,而且使用维护方便。
图6-24所示是采用脉冲分配器专用集成电路PMM8713的实例,设定在双四拍工作方式。电动机的转速由端子CK的脉冲输入频率决定,正、反转切换是由U/D端子取“1”还是取“0”来决定(电动机的正、反转也可以采用脉冲控制的方法通过CU和CD端子来进行。CU端输入的脉冲使电动机正转,CD端输入的脉冲使电动机反转,此时CK和U/D端同时接地)。ϕC端是为切换电动机相数用的控制端,三相电动机时ϕC=“0”,四相电动机时ϕC=“1”。ϕ1~ϕ4为脉冲输出端,直接连接驱动电路。EA、EB为励磁方式选择,1相和2相励磁时,EA=EB=“1”;反2相励磁时,EA=EB=“0”;反1相励磁时,其中一端为“1”,另一端为“0”; 为复位端,
为复位端,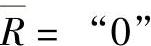 时,ϕ1~ϕ4均为“1”状态,此时步进电动动机锁住不动。
时,ϕ1~ϕ4均为“1”状态,此时步进电动动机锁住不动。
微机控制步进电动机的方案很多。一类是用软件来实现脉冲分配器功能,由并行口送励磁信号去控制驱动电路。这类方案实现分配器功能灵活,但微机负担加重;另一类是微机和专用集成芯片组成控制系统,组成多功能的步进电动机驱动电路,可以减轻微机的负担。图6-25是采用PMM8713、可编程计数器8253及并行接口等组成的数字计算机控制方式的原理图。
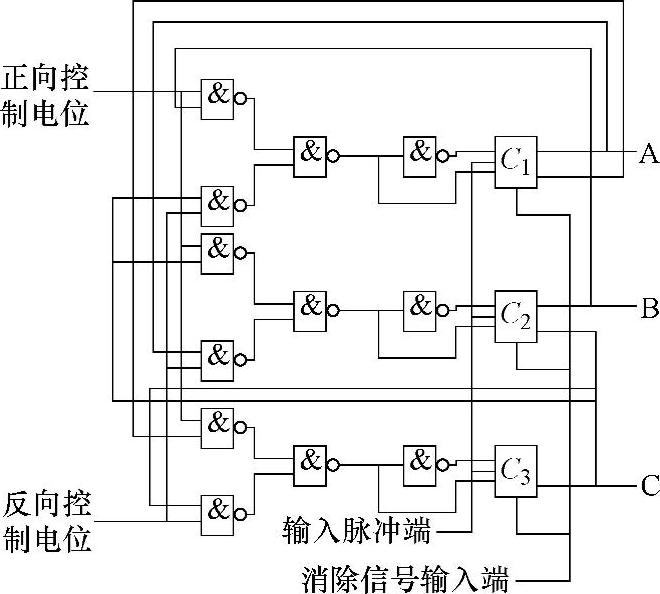
图6-23 三相六拍脉冲分配器电路
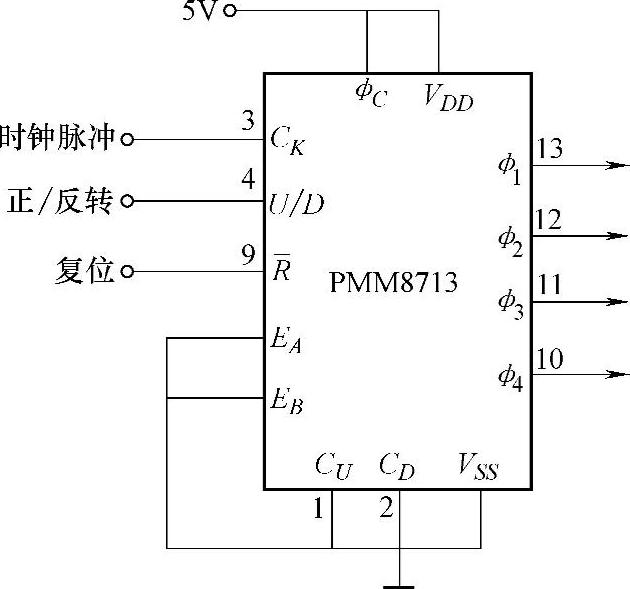
图6-24 脉冲分配器专用集成电路PMM8713
8253中的两个计数器用来进行速度和位置控制。通过改变计数器1的时间常数,改变加到PMM8713芯片CK端的脉冲频率,具有控制步进电动机转速的作用。计数器2用来统计加到CK端脉冲数,作为位置控制计数器。由并行口4位输出接到PMM8713的 、EA、EB、U/D端。因此,可以随意控制电动机的转向、运行/停止及改变励磁方式等。改变脉冲频率的过程是,当计数器2的计数值到达内部寄存器的设置值时,输出的脉冲通过接口向CPU申请中断,CPU一旦响应,就进入中断处理。在中断服务程序中,改写计数器1的时间常数,就可以改变CK端的脉冲频率。于是,在这一控制系统中,CPU每中断一次,步进电动机的脉冲频率就改变一次,从而实现电动机的速度控制。计数器2所计的脉冲数值可以用来计算步进电动机的旋转角,因此,在此值等于设定位置角的时候,使接至并行接口的R端逻辑电平变低,就能够控制位置。
、EA、EB、U/D端。因此,可以随意控制电动机的转向、运行/停止及改变励磁方式等。改变脉冲频率的过程是,当计数器2的计数值到达内部寄存器的设置值时,输出的脉冲通过接口向CPU申请中断,CPU一旦响应,就进入中断处理。在中断服务程序中,改写计数器1的时间常数,就可以改变CK端的脉冲频率。于是,在这一控制系统中,CPU每中断一次,步进电动机的脉冲频率就改变一次,从而实现电动机的速度控制。计数器2所计的脉冲数值可以用来计算步进电动机的旋转角,因此,在此值等于设定位置角的时候,使接至并行接口的R端逻辑电平变低,就能够控制位置。
图6-25 步进电动机数字计算机控制方式原理图
(2)功率驱动器
按功率放大器电路不同,步进电动机驱动电路主要可分为单电压电路、双电压电路、恒流斩波电路、细分电路、调频调压电路等。
1)单电压电路
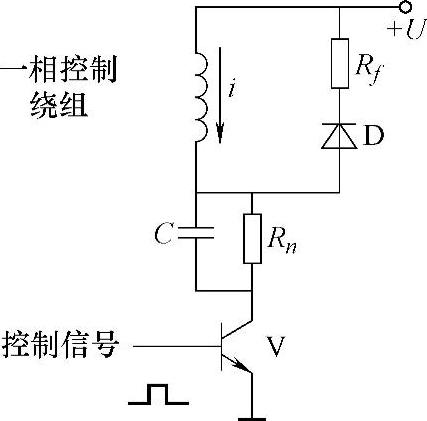
单电压电路即单一电源供电的电路。如图6-26所示为单电压驱动电路。当有控制脉冲信号输入时,功率管V导通,控制绕组有电流流过;否则,功率管V关断,控制绕组没有电流流过。
为了减少控制绕组的时间常数,提高步进电动机的动态转矩,在控制绕组中串联电阻Rn,同时也起限制电流的作用。电阻两端并联电容C是为了改善步进电动机控制绕组电流脉冲的前沿。二极管和电阻Rf构成了放电回路,限制功率管V集电极上的电压和保护功率管V。
这种电路的最大特点是线路简单,功率元件少,成本低。但它的缺点是由于Rn要消耗能量,使得工作效率较低。这种电路一般只适于小功率步进电动机的驱动。
2)双电压电路(高低电压电路)
为了改善控制绕组中电流的波形,可以采用双电压电路。双电压电路如图6-27所示。当输入控制脉冲信号时,功率管V1、V2导通,低压电源由于二极管D1承受反向电压而处于截止状态,这时高压电源加在控制绕组上,控制绕组电流迅速上升。当电流上升到额定值时,利用定时电路使功率管V1断开,V2仍然导通,控制绕组由低压电源供电,维持其额定电流。
采用双电压电路可以改善输出电流的波形,所以电动机的矩频特性好,起动和运行频率得到了很大的提高。主要缺点是低频运行时输入能量过大,造成步进电动机低频振荡加重,同时也要增大电源的容量。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-26 单电压驱动电路
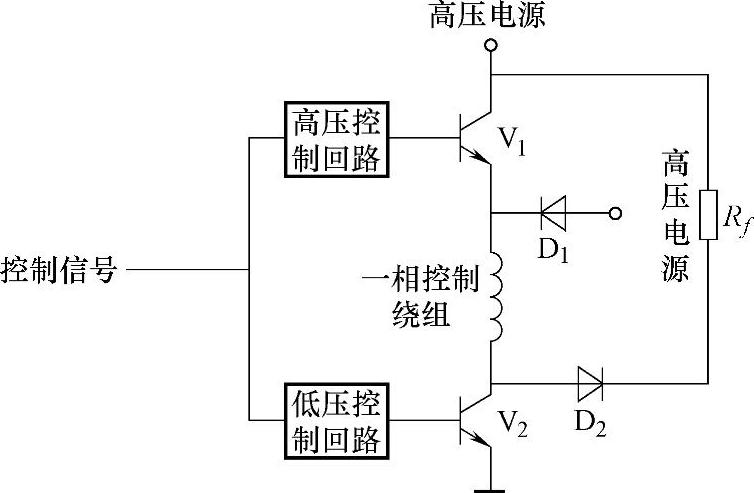
图6-27 双电压电路原理图
3)恒流斩波电路
恒流斩波电路可以更好地解决绕组电流导通后的平稳性,使得步进电动机在额定电流附近产生最小的脉动。恒流斩波电路是通过对绕组电流的检测,实现对电流大小的控制,当绕组电流高于额定值时,断开相应的功率管;当电流低于额定值时,开启相应的功率管,如图6-28所示。
这种电路相当于在双电压电路基础上多加了一个电流检测控制线路,因而可以根据绕组电流来控制高压电源的接通和断开。当分配器输出脉冲信号时,低压管V2饱和导通,而高压管V1受到与门输出的限制。如图6-29所示,当绕组中电流小于要求的电流I2时,鉴幅器输出高电平,使与门打开,与门输出经电流放大后使V1管导通,高压电源输入,绕组电流上升;当电流上升到峰值电流I1时,鉴幅器输出低电平,与门关闭,V1管断开,高压电源被切断;当电流下降到谷点电流I2时,鉴幅器输出高电平,使V1再次导通。这样依靠高压管的多次接通和关断,使绕组电流波形维持在额定值I0附近。
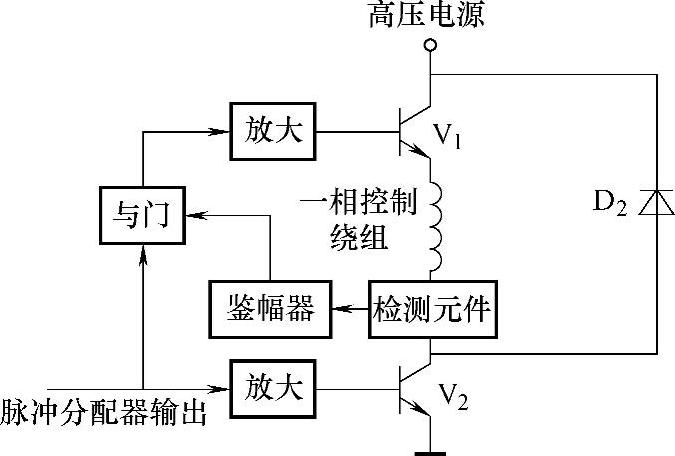
图6-28 恒流斩波电路原理图
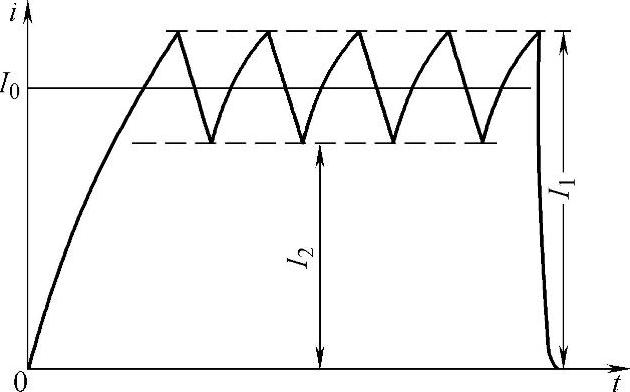
图6-29 恒流斩波电路波形
4)细分电路
步进电动机的制造受到工艺的限制,它的步矩角是有限的。在实际中,有些系统往往要求步进电动机的步矩角必须很小才能满足要求。如数控机床为了提高加工精度,要求脉冲当量达到0.01mm/脉冲,一般的步进电动机驱动方式对此无能为力。为了能满足要求,可以采用细分的驱动方式。所谓细分驱动方式,就是把原来的一步再细分为若干步,使步进电动机的转动近似为均匀运动,并能在任何位置停止。为此,可将原来的矩形脉冲电流改为阶梯波电流,如图6-30所示,电流每上一个阶梯,步进电动机转动一个角度,步距角就减小了很多。
实现阶梯波通常有两种方法:一种是对细分方波先放大后叠加,另一种则是先叠加后放大。前者电路使得功率元件增加,但元件容量大幅降低,该电路结构简单,容易调整,适合于中、大功率步进电动机的驱动;后者功率元件少,但元件容量大,适合于小功率步进电动机的驱动。
5)调频调压电路
步进电动机低频时因绕组电流过大易于产生振荡,高频时由于注入电流减少而导致转矩下降,因此,理想情况下希望低频低压,高频高压。这种方法的思路正是当步进电动机低频运行时调低供电电压,高频运行时调高供电电压,使绕组电压随着电动机的转速而变化。
步进电动机驱动电路的另外一种分类是根据驱动电流方向分类。可分为单极性驱动和双极性驱动。在单极性驱动的步进电动机中,电流只在一个方向流过步进电动机绕组,在双极性驱动电流中,电流将会在两个方向流过步进电动机的绕组。由于步进电动机控制集成电路的发展,使得步进电动机控制越来越方便,下面就以双极性步进电动机控制芯片为例,介绍集成驱动电路的应用。
双极性驱动芯片LB1945H是SANYO公司产的单片双H桥驱动器,适合于驱动双相步进电动机。该芯片采用PWM电流控制,实现四拍、八拍通电方式的运转,图6-31为其内部结构图。
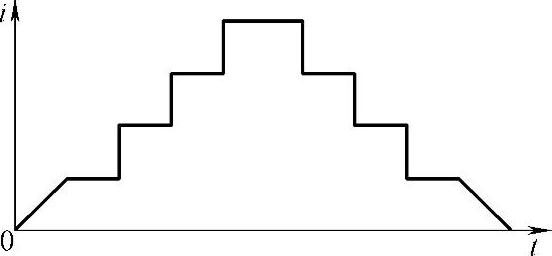
图6-30 阶梯波电流波形
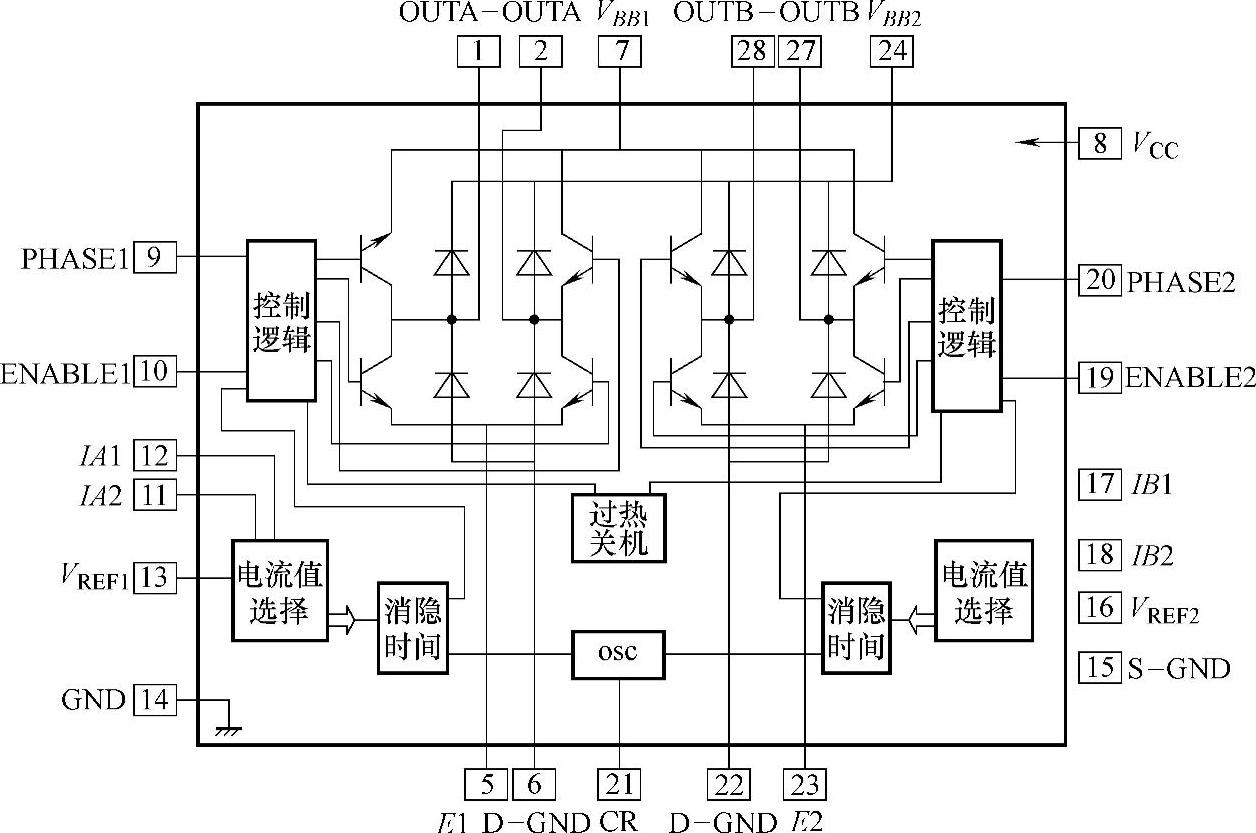
图6-31 LB1945H内部结构图
其中:OUTA、OUTA-、OUTB、OUTB-为输出端,接两相步进电机线圈;PHASE1、PHASE2为输出相选择端,如果为高电平,OUTA=H,OUTA-=L,如果为低电平,OUTA=L,OUTA-=H;IA1、IA2、IB1、IB2为逻辑输入端,设定输出电流值;VREF1、VREF2为输出电流设定参考电压。LB1945H的典型应用电路如图6-32所示。
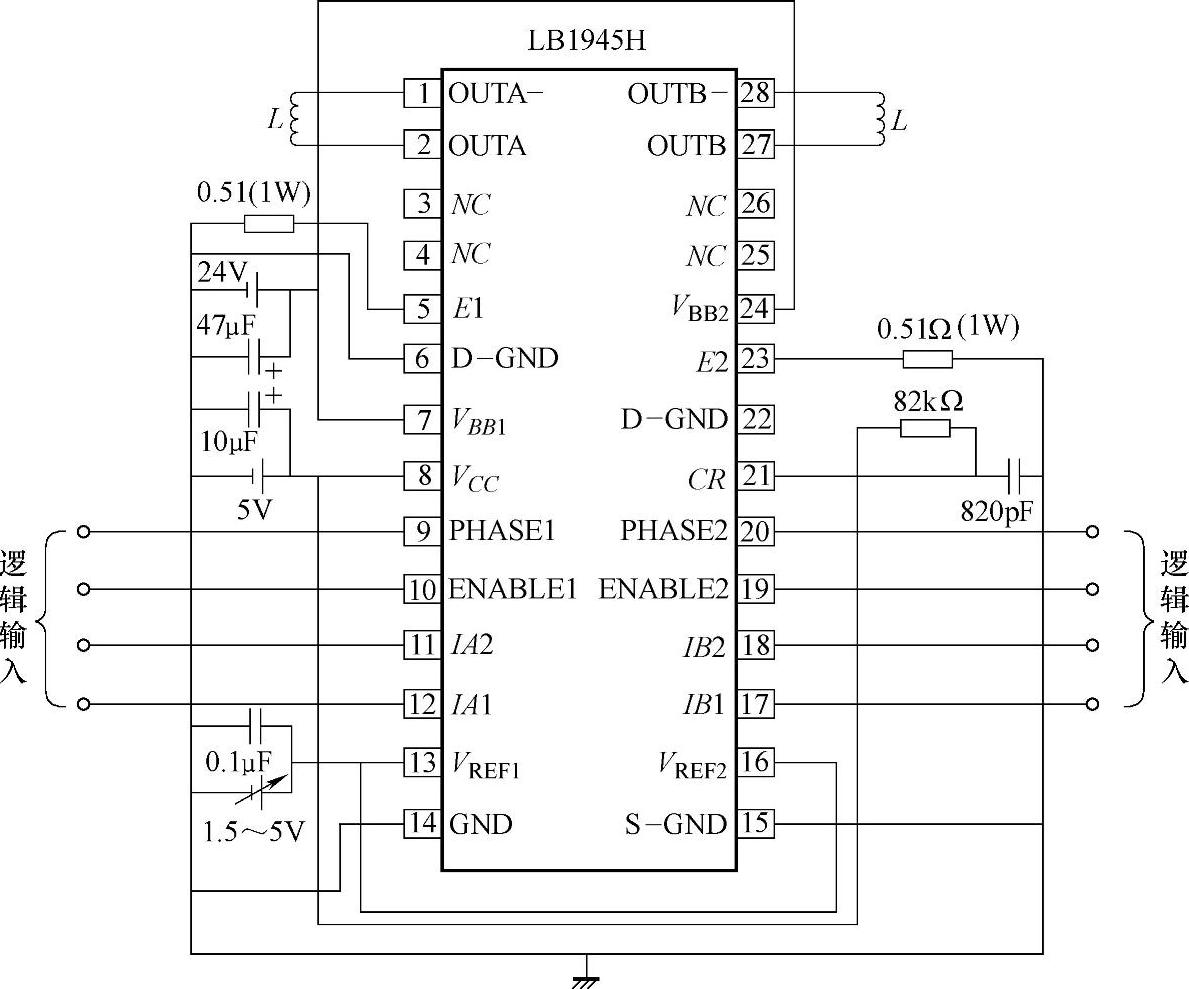
图6-32 LB1945H典型应用电路
LB1945H利用从上位机传来的控制指令PHASE、IA1、IA2(IB1、IB2)和数字输入VREF1、VREF2模拟电压输入的不同组合,可得到所需要的通电方式和预定的电流值。由PHASE控制H桥输出的电流方向,由IA1、IA2(IB1、IB2)数字输入得到输出电流值比例的四种选择:1、2/3、1/3、0。从VREF1、VREF2输入的模拟电压可在1.5V~5V范围内连续变化。LB1945H从外接传感器电阻RS获得电流反馈,由PWM电流闭环控制,使输出电流随输入变化的要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。