



机电一体化系统中经常需要测量位移量,位移传感器主要用于检测线位移和角位移等物理量。对于直线位移的测量,常见的有电感式位移传感器、电容式位移传感器以及光栅等;对于角位移传感器,本书主要介绍光电编码盘。
(1)电感式位移传感器
电感式位移传感器是基于电磁感应原理将位移转换为电感量变化的传感器。电感式位移传感器按照变换方式的不同可分为自感型(包括可变磁阻式与涡流式)与互感型(差动变压器式)两种,下面分别进行介绍。
1)自感型
①可变磁阻式。可变磁阻式传感器的构造原理如图4-5所示。它由线圈、铁芯和衔铁组成。
在铁芯和衔铁之间有气隙δ。由电工学得知,线圈自感量L为:

式中 W——线圈匝数;
Rm——磁路总磁阻[H-1]。
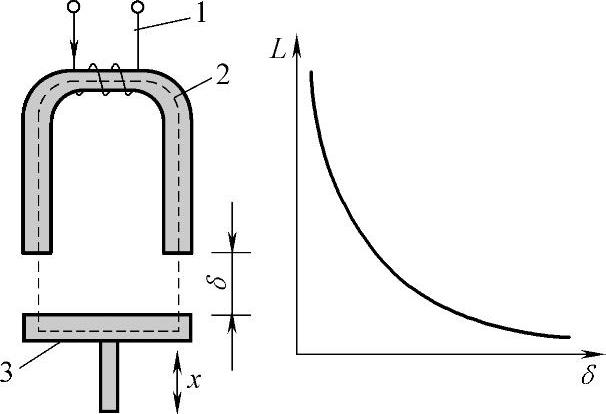
图4-5 可变磁阻式传感器
1—线圈 2—铁芯 3—衔铁
如果空气隙δ较小,而且不考虑磁路的铁损时,则总磁阻为:

式中 l——铁芯导磁长度;
μ——铁芯磁导率;
A——铁芯导磁截面面积,A=a×b;
δ——气隙长度;
μ0——空气磁导率,μ0=4π×1-7;
A0——空气隙导磁横截面面积。
因为铁芯磁阻远远小于空气隙的磁阻,计算时可忽略,故

代入式(4-4),则

式(4-6)表明,自感L与气隙δ成反比,而与气隙导磁截面面积A0成正比。当A0值固定,δ变化时,L与δ呈非线性关系,此时传感器的灵敏度为:

灵敏度S与气隙长度的平方成反比,δ越小,灵敏度越高。由于S不是常数,故会出现线性误差。为了减小这一误差,通常规定在较小间隙范围内工作。设间隙变化范围为(δ0,δ0+Δδ),一般实际应用中,取Δδ/δ0≤0.1。这种传感器适用于位移量较小的测量。
②涡电流式位移传感器。涡电流式传感器的变换原理是利用金属体在交变磁场中的涡电流效应。
涡电流效应的原理图如图4-6所示,将金属板置于一只线圈的附近,其间距为δ。在线圈中通一高频交变电流i,便产生磁通Φ。交变磁通Φ通过邻近的金属板,金属板上此时产生感应电流i1。感应电流i1在金属体内自身闭合,称为“涡电流”或“涡流”。同时,涡电流也将产生交变磁通Φ1。根据楞次定律,涡电流的交变磁场与线圈的磁场变化方向相反,Φ1总是抵抗Φ的变化。涡流磁场的作用使原线圈的等效阻抗Z发生变化,其变化程度与距离δ有关。
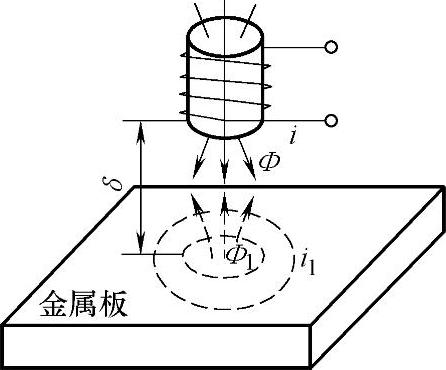
图4-6 涡流传感器原理图
研究表明,高频线圈阻抗Z除了受线圈与金属板间距离δ影响以外,还受金属板电阻率ρ、磁导率μ以及线圈激磁圆频率ω等因素的影响。任意改变其中某一因素时,可以进行不同目的的测量。例如,变化δ,可作为位移、振动测量;变化ρ或μ值,可作为材质鉴别或探伤等。
涡电流式传感器的一个优点是可用于动态非接触测量,测量范围与传感器结构尺寸、线圈匝数和激磁频率密切相关,测量范围从-1~1mm到-10~10mm,最高分辨力可达1μm。除了以上优点之外,这种传感器还具有结构简单、使用方便、不受油液等介质影响等特点。以涡电流式传感器为核心的涡电流式位移和振动测量仪、测厚仪和无损探伤仪等在机械、冶金工业中日益得到广泛应用。实际上,这种传感器在径向振摆、转速和厚度测量、回转轴误差运动,以及在零件计数、表面裂纹和缺陷测量中都有成功应用。
2)互感型
差动变压器式电感传感器的工作原理是利用电磁感应中的互感现象,如图4-7所示。
当线圈W1输入交流电流i1时,在线圈W2中产生感应电动势e12,其大小与电流i1的变化率成正比,公式如下:

式中 M——比例系数,称为互感,其大小与两线圈相对位置及周围介质的导磁能力等因素有关,它表明两线圈之间的耦合程度。

图4-7 互感现象电路图
互感型传感器利用这一原理,将被测位移量转换成线圈互感的变化。实际上,互感型传感器的本质就是一个变压器,将初级线圈接入稳定交流电源,则在次级线圈感应出输出电压。由于常常采用两个次级线圈组成差动式,故又称为差动变压器式传感器。
差动变压器式电感传感器的分辨力能够达到0.1μm,线性范围可达到-100~100mm,同时具备稳定度好和使用方便等特点,因此,被广泛应用于直线位移的测量。但是差动变压器式电感传感器的实际测量频率上限受制于传感器中所包含的机械结构。
(2)电容式位移传感器
电容式位移传感器是将被测物理量转换为电容量变化的装置。由两个平行极板组成的电容器其电容量为:

式中 ε——极板间介质的相对介电常数,在空气中ε=1;
ε0——真空中的介电常数,ε0=8.85×10-12F/m;
δ——极板间距离;
A——极板面积。
式(4-9)表明,当被测量使电容器的基本参数δ、A或ε发生变化时,都会引起电容C的变化。因此,可以将电容器的某一个参数的变化量变换为电容量的变化。根据电容器变化的参数,可分为极距变化型、面积变化型和介质变化型三类。在实际中,极距变化型与面积变化型都可以用于测量位移,而介质变化型可以用鉴别材料,这里不作详述。(https://www.xing528.com)
1)极距变化型
根据式(4-9),如果两极板间互相覆盖面积及极间介质不变,则电容量C与极距δ呈非线性关系,如图4-8所示。当极距有一微小变化量dδ时,引起电容的变化量dC为:

由此可以得到传感器灵敏度

可以看出,灵敏度S与极距的平方成反比,因此极距越小灵敏度越高。根据灵敏度公式可以看出,灵敏度是随极距的变化而改变的,这将引起线性误差。因此,通常将极距的变化规定在较小的变化范围内,以便获得近似线性的关系。一般取极距变化范围约为Δδ/δ0=0.1。
极距变化型电容传感器的优点是可进行动态非接触式测量,对被测工件的影响小;灵敏度高。但适用的位移范围较小,从0.01μm至数百微米;同时这种传感器有线性误差,传感器的杂散电容对灵敏度和测量精确度有一定影响,与传感器配合使用的电子线路也比较复杂。由于以上一些缺点,其使用范围受到一定限制。
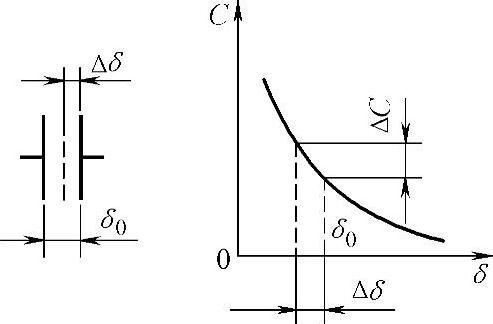
图4-8 极距变化型电容传感器原理图
2)面积变化型
在变换极板面积的电容传感器中,一般常用的有角位移型和线位移型两种。
如图4-9a所示为平面线位移型电容传感器。当动板沿x方向移动时,动板和定板的重合面积发生变化,电容量也随之变化。其电容量C为:

式中 b——极板宽度。

图4-9 面积变化型电容传感器
a)平面线位移型 b)圆柱体线位移型
1—动板 2—定板
该传感器灵敏度为:

对于如图4-9b所示的圆柱体线位移型电容传感器。其电容为:

式中 D——圆筒孔径;
d——圆柱外径。
当覆盖长度x变化时,电容量C随之发生变化,其灵敏度为:

根据灵敏度公式可知面积变化型电容传感器的输出与输入成线性关系。但与极距变化型相比,灵敏度较低,适用于相对较大直线位移及角位移的测量。
(3)光栅
光栅是基于光电转化原理而制成的位移检测元件,它的测量精度很高,分辨率可以达到1μm甚至更高,响应速度很快,量程很大。
图4-10所示为光栅的组成结构示意图,它由光栅尺、指示光栅、光电二极管和光源构成,光栅尺长度一般远超指示光栅,但光栅尺与指示光栅的光刻密度相同,一般为25条/mm、50条/mm、100条/mm、250条/mm。使用时,一般将光栅尺安装在相对固定的基体上,而指示光栅安装在移动被测物体上,指示光栅平行于光栅尺,两者的刻线相互倾斜一个很小的角度,这时在指示光栅上就出现了几条较粗的明暗条纹,称之为莫尔条纹,如图4-11中的两条横向黑色粗线条,它们沿着与光栅条纹几乎呈垂直的方向排列。随着技术进步,光栅的基本组成元件的集成度越来越高,有些光栅只包含光栅尺和读数头两部分,读数头同时起到了指示光栅、光电二极管和光源的作用,使得光栅的结构更为简单,可靠性更高,但基本原理并没有明显变化。

图4-10 光栅的组成结构示意图
1—光栅尺 2—指示光栅 3—光电二极管 4—光源

图4-11 光栅莫尔条纹示意图
光栅莫尔条纹起到了放大的作用,用W表示莫尔条纹宽度,P表示光栅栅距,则有公式:

(4)光电编码器
光电码盘与光栅类似,同样是基于光电转化原理。两者的区别在于光电编码器可以将机械传动的模拟量转换成旋转角度的数字信号,是进行角位移检测的传感器。根据刻度方法及信号输出形式,光电编码器可以分为增量式光电编码器和绝对式光电编码器。
1)增量式光电编码器
增量式光电编码器采用圆光栅,通过光电转换器件,将旋转角位移转换成电脉冲信号,经过电路处理后,将输入的机械量转换成相应的数字量。光电编码器由装在被测轴(或与被测轴相连接的输入轴)上的带缝隙的编码圆盘、带两相缝隙的指示标度盘和光电器件组成,如图4-12所示。编码圆盘安装在旋转轴上并随之一起旋转,指示标度盘与传感器外壳固定。编码圆盘上刻有等分的明暗相间的主信号窗口和一个绝对零点信号窗口。在指示表盘上有三个窗口,一个作为零信号窗口,一般定义为Z相原点信号输出;其余两个窗口,当一个窗口与编码圆盘窗口对准时,另一个窗口与编码圆盘上的相应窗口相差90°,这两个窗口一般定义为A相、B相输出,采用A相和B相两相信号输出可以用于判断码盘的旋转方向。
增量式编码器只需要发光二极管和光敏二极管两个光电转换元件,体积小、结构紧凑、质量轻、启动力矩小、同时具有较高的精度。增量式光电编码器是非接触式的,该类型编码器寿命长、功耗低、耐振动、可靠性高,在角度测量领域应用广泛,在一些情况下,可以间接用于转速和转动加速度测量。

图4-12 增量式光电编码器
2)绝对式光电编码器
绝对式光电编码器的基本构成与增量式光电编码器类似,两者的主要区别在于编码盘不同。绝对式光电编码器的编码盘由透明及不透明区组成,这些透明区及不透明区按一定编码构成,编码盘上码道的条数就是数码的位数,如图4-13所示,码盘含有4个码道,图4-13a为4位自然二进制编码器的编码盘,图4-13b为4位格雷码编码盘。
绝对式光电编码盘的码盘码道数量可以做的很多,相应地,码道数越多,编码器的分辨率越高。与增量式编码器类似,绝对式编码器同样为非接触式测量,具有使用寿命长,可靠性高等优点。但缺点是结构较增量式编码器复杂,光源寿命较短。
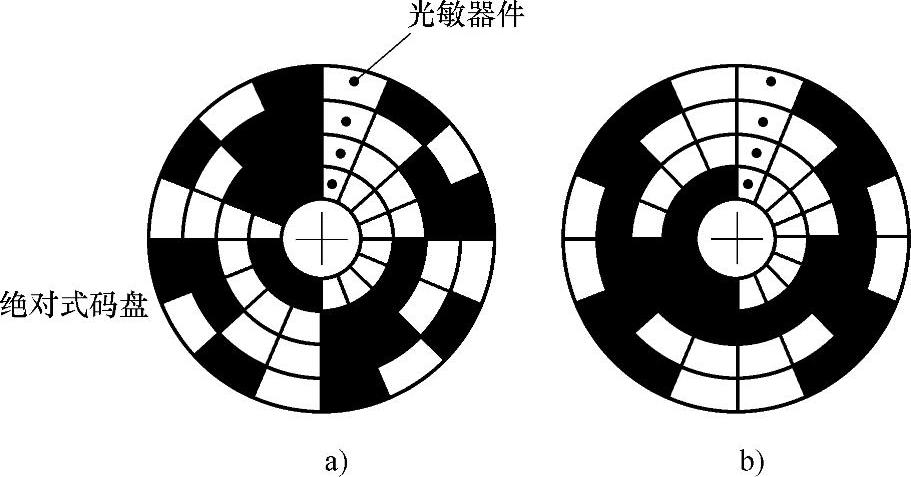
图4-13 绝对式光电编码器的编码盘结构示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。