



【摘要】:机构简图是指用简单符号和线条代表运动副和构件,绘制出表示机构的简明图形。表2-3 常用的机构简图图2-45至图2-48为用机构简图表示的工业机器人的运动原理。图2-45为直角坐标机器人,这种形式的机器人可以在三个互相垂直的方向上做直线伸缩运动。它的运动范围为一个圆柱体,与直角坐标机器人相比,其占地面积小,活动范围广。图2-45 直角坐标机器人图2-46 圆柱坐标机器人图2-47 极坐标机器人图2-48 多关节机器人
机电一体化系统机械结构设计的第一步往往是方案设计,即首先设计、分析其机械原理方案,这一设计阶段的重点在于机构的运动分析,机构的具体结构、组成方式等在这一设计阶段并不影响机构的运动特性。因此,机构的运动原理往往用机构简图来绘制。机构简图是指用简单符号和线条代表运动副和构件,绘制出表示机构的简明图形。常用的机构简图见表2-3所示。
表2-3 常用的机构简图
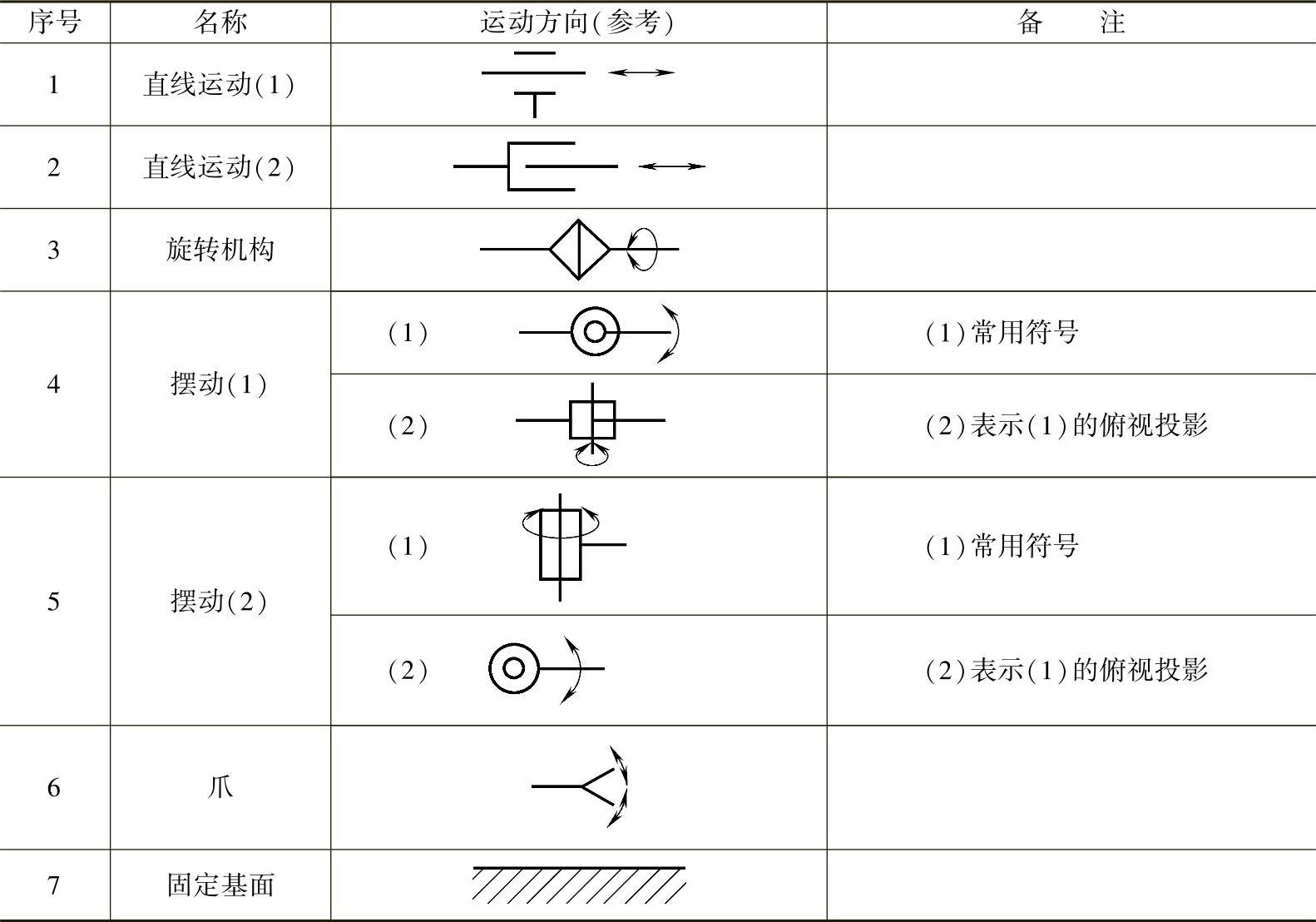
图2-45至图2-48为用机构简图表示的工业机器人的运动原理。
图2-45为直角坐标机器人,这种形式的机器人可以在三个互相垂直的方向上做直线伸缩运动。这种形式的机器人三个方向的运动均是独立的,控制方便,但占地面积较大。
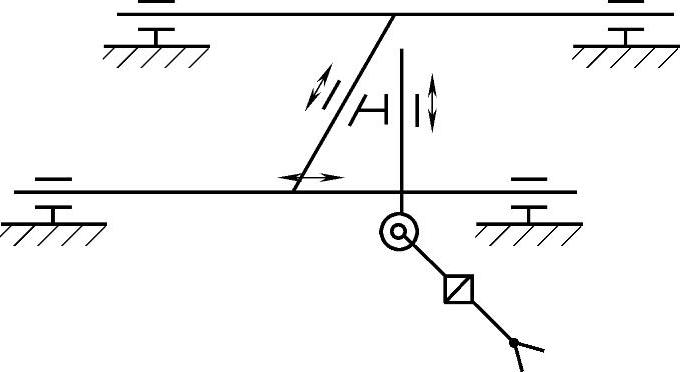
图2-46为圆柱坐标机器人,这种形式的机器人可以在一个绕基座轴的方向上做旋转运动和两个在相互垂直方向上的方向上做直线伸缩运动。它的运动范围为一个圆柱体,与直角坐标机器人相比,其占地面积小,活动范围广。
图2-47为极坐标机器人,这种机器人的运动范围由一个直线运动和两个回转运动组成。其特点类似于圆柱坐标机器人。
图2-48为多关节机器人,该形式的机器人由多个旋转或摆动关节组成,其结构近似于人的手臂。多关节机器人动作灵活、工作范围广,但其运动主观性较差。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-45 直角坐标机器人
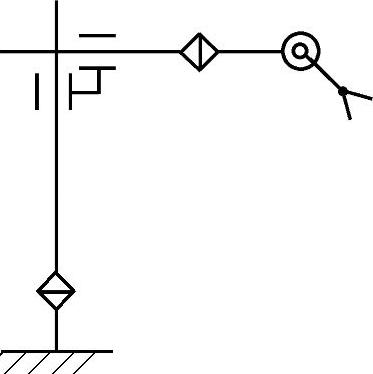
图2-46 圆柱坐标机器人
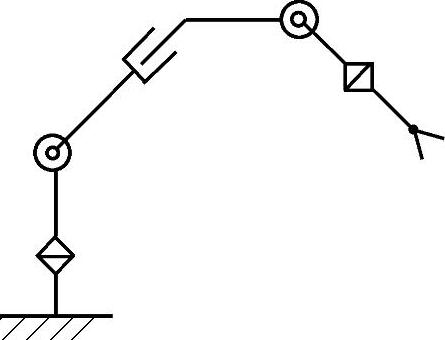
图2-47 极坐标机器人
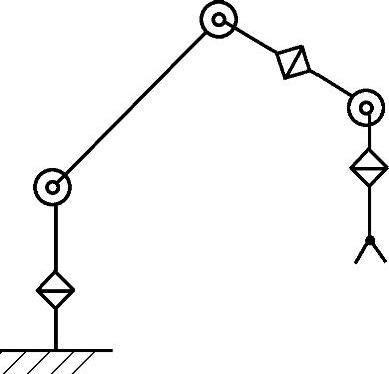
图2-48 多关节机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。