



末端执行器安装在机械手的手腕或手臂的机械接口上,是直接执行作业任务的装置。末端执行器根据用途不同可分为三类:机械夹持器、吸附式末端执行器和灵巧手。
(1)机械夹持器
机械夹持器具有夹持和松开的功能。夹持工件时,有一定的力约束和形状约束,以保证被夹工件在移动、停留和装入过程中,不改变姿态。松开工件时,应完全松开。机械夹持器的组成部分包括手指、传动机构和驱动装置。手指是直接与工件接触的部件,夹持器松开和夹紧工件是通过手指的张开和闭合来实现的。传动机构向手指传递运动和动力,以实现夹紧和松开动作。驱动装置是向传动机构提供动力的装置,一般有液压、气动、机械等驱动方式。根据手指夹持工件时的运动轨迹的不同,机械夹持器分为圆弧开合型、圆弧平行开合型和直线平行开合型。
图2-32所示为圆弧开合型液压连杆传动夹持器。其工作过程如下:
1)抓取。液压缸3向下运动,通过连杆2使手指1绕支架4上的固定销轴转动,抓取工件5。
2)夹紧。液压缸3继续向下运动,使手指2以较大的力夹持工件5。
3)放开。液压缸3向上运动,通过连杆2使手指1绕支架4上的固定销轴的反向转动,放开工件5。
该夹持器用于夹持圆柱形的工件。
图2-33为用于夹持方形工件的圆弧开合型夹持器。夹持器工作时,两手指绕支点作圆弧运动,同时对工件进行夹紧和定心。这类夹持器对工件被夹持部位的尺寸有严格要求,否则可能会造成工作状态异常。
图2-34为圆弧平行开合型夹持器。这类夹持器工作时两手指作平行开合运动,而指端运动轨迹为一圆弧。图2-34所示的夹持器是采用平行四边形传动机构带动手指的平行开合的两种情况。图2-34a为机构在夹持时指端前进,图2-34b为机构在夹持时指端后退。
图2-35为直线平行开合型夹持器。这类夹持器两手指的运动轨迹为直线,且两手指夹持面始终保持平行。图2-35所示的为采用齿轮齿条机构的直线平行开合型夹持器,当活塞杆末端的齿条带动齿轮旋转时,手指上的齿条作直线运动,从而使两手指平行开合,进行夹持工件。
(2)吸附式末端执行器
吸附式末端执行器可分为气吸式和磁吸式两类。气吸式末端执行器利用真空吸力或负压吸力吸持工件,它适用于抓取薄片及易碎工件的情形,吸盘通常由橡胶或塑料制成;磁吸式末端执行器则是利用电磁铁和永久磁铁的磁场力吸取具有磁性的小五金工件。
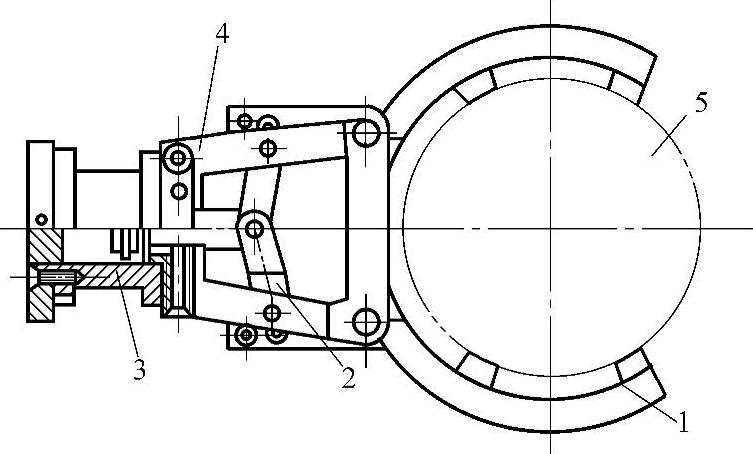
图2-32 圆柱形工件圆弧开合型液压连杆传动夹持器
1—手指 2—传动机构(连杆) 3—驱动装置(液压缸) 4—支架 5—工件
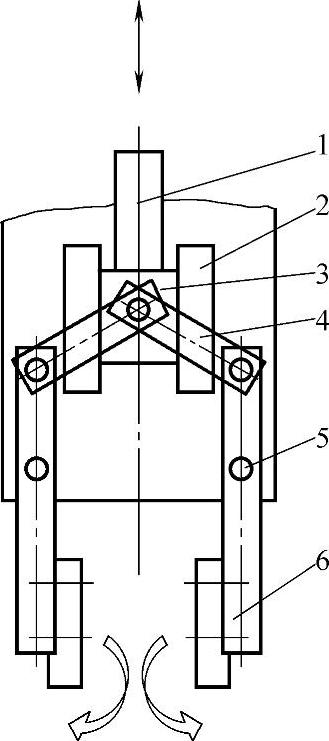
图2-33 方形工件圆弧开合型夹持器
1—杆 2—十字头 3—导轨 4—中间连杆 5—支点 6—手指(https://www.xing528.com)
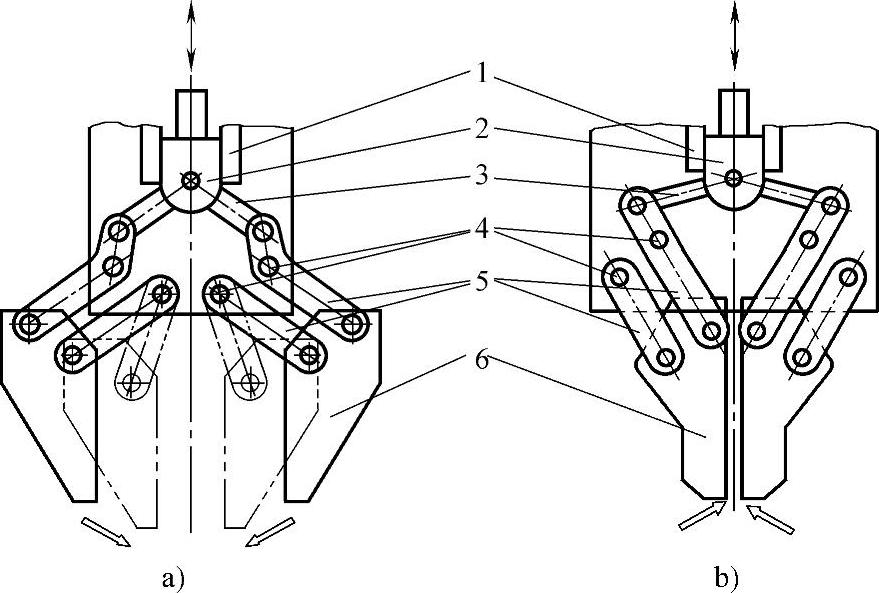
图2-34 圆弧平行开合型夹持器
1—导轨 2—十字头 3—中间连杆 4—支点 5—平行连杆 6—手指
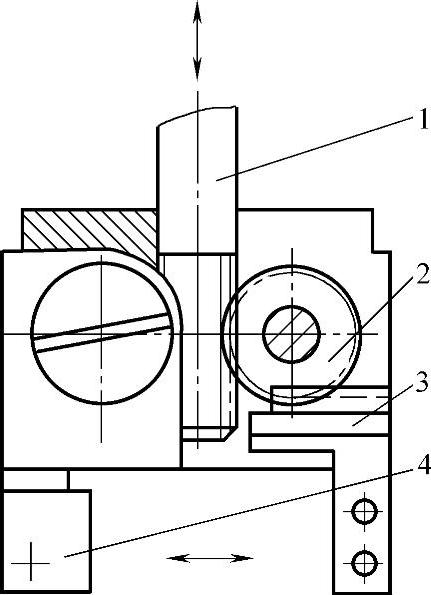
图2-35 直线平行开合型夹持器
1—活塞杆齿条 2—齿轮 3—手指齿条 4—手指
图2-36所示为真空吸附式末端执行器(真空吸附手),抓取工件时,橡胶吸盘与工件表面接触,橡胶吸盘起到密封和缓冲的作用,通过真空泵抽气来达到真空状态,在吸盘内形成负压,实现工件的抓取。松开工件时,吸盘内通入大气,失去真空状态后,工件被放下。该吸附式末端执行器结构简单、价格低廉,常用于小件搬运,也可根据工件形状、尺寸、重量的不同将多个真空吸附手组合使用。
图2-37所示为电磁吸附式末端执行器,又称为电磁吸附手,它利用通电线圈的磁场对可磁化材料的作用来实现对工件的吸附。该执行器同样具有结构简单,价格低廉的特点。电磁吸附手的吸附力是由通电线圈的磁场提供的,所以可用于搬运较大的可磁化材料的工件。吸附手的形状可根据被吸附工件表面形状来设计,既可用于吸附平坦表面工件又可用于吸附曲面工件。图2-37所示的电磁吸附手用于吸附曲面工件,吸附手的吸附部位装有磁粉袋,线圈通电前将可变形的磁粉袋贴在工件表面上,当线圈通电励磁后,在磁场作用下,磁粉袋端部外形固定成被吸附工件的表面形状,从而达到吸附不同表面形状工件的目的。
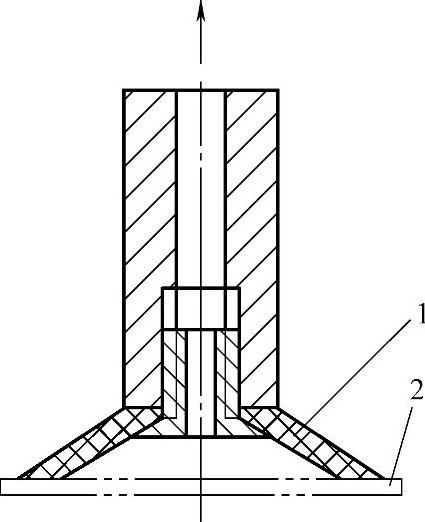
图2-36 真空吸附式末端执行器
1—橡胶吸盘 2—工件
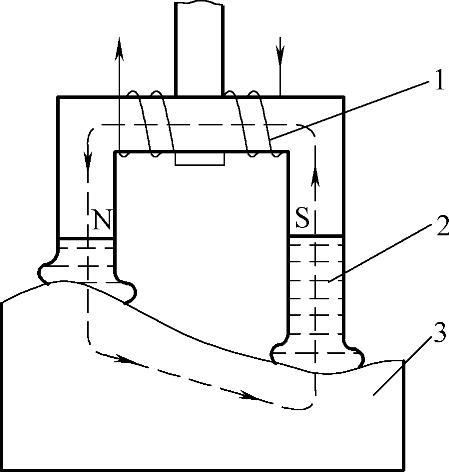
图2-37 电磁吸附式末端执行器
1—励磁线圈 2—磁粉袋 3—工件
(3)灵巧手
灵巧手是一种模仿人手制作的多指多关节的机器人末端执行器。它可以适应物体外形的变化,对物体进行任意方向、任意大小的夹持力,可以满足对任意形状、不同材质物体的操作和抓持要求,但是其控制、操作系统技术难度大。图2-38为灵巧手的一些实例。
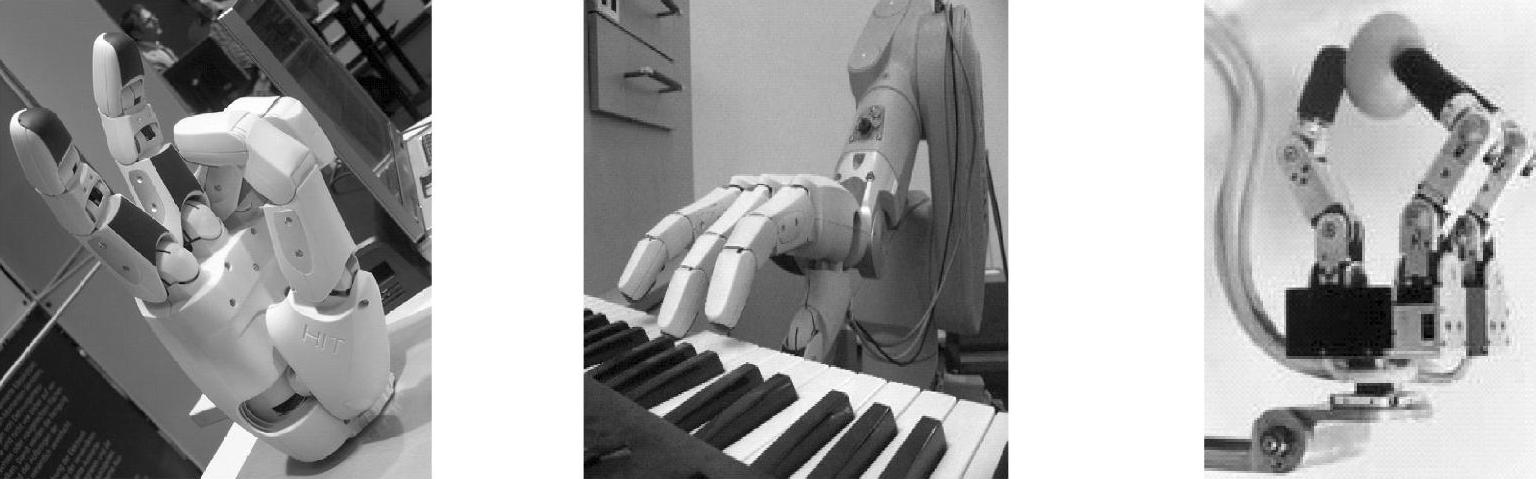
图2-38 灵巧手
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。