



微动执行机构是一种能在一定范围内精确、微量地移动到给定位置或实现特定的进给运动的机构,在机电一体化产品中,它一般用于精确、微量地调节某些部件的相对位置。微动执行机构应该能满足以下要求:灵敏度高,最小移动量能达到移动要求;传动灵活、平稳,无空行程与爬行现象,制动后能保持在稳定的位置;抗干扰能力强,响应速度快;能实现自动控制;良好的结构工艺性。微动执行机构按照运动原理可分为热变形式、磁致伸缩式和压电陶瓷式。
(1)热变形式
热变形式微动执行机构利用电热元件作为动力源,通过电热元件通电后产生的热变形实现微小位移,其工作原理如图2-29所示。传动杆1的一端固定在机座上,另一端固定在沿导轨移动的运动件3上。电阻丝2通电加热时,传动杆1受热伸长,其伸长量ΔL(mm)为
ΔL=α·L·(t1-t0)=α·L·Δt (2-8)
式中 α——传动杆1材料的线胀系数,mm/℃;
L——传动杆长度,mm;
t1——加热后的温度,℃;
t0——加热前的温度,℃;
Δt——加热前后的温度差,℃。
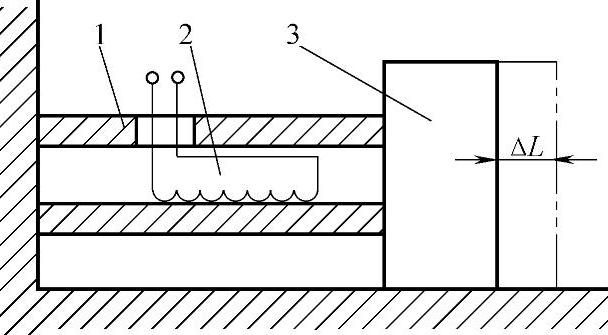
图2-29 热变形式微动执行机构工作原理
1—传动杆 2—电阻丝 3—运动件
热变形微动机构具有高刚度和无间隙的优点,并可通过控制加热电流得到所需微量位移;但由于热惯性以及冷却速度难以精确控制等原因,这种微动系统只适用于行程较短且使用频率不高的场合。
(2)磁致伸缩式
磁致伸缩式微动执行机构是利用某些材料在磁场作用下具有改变尺寸的磁致伸缩效应,来实现微量位移。其工作原理如图2-30所示,磁致伸缩棒1左端固定在机座上,右端与运动件2相连;绕在伸缩棒外的磁致线圈通电励磁后,在磁场作用下,磁致伸缩棒1产生伸缩变形而使运动件2实现微量移动。通过改变线圈的通电电流来改变磁场强度,使磁致伸缩棒1产生不同的伸缩变形,从而运动件可得到不同的位移量。在磁场作用下,磁致伸缩棒的变形量ΔL(m)为
ΔL=±λ·L (2-9)
式中 λ——材料磁致伸缩系数,ppm;(https://www.xing528.com)
L——伸缩棒被磁化部分的长度,m。
磁致伸缩式微动机构的特征有重复精度高、无间隙、刚度好、惯量小、工作稳定性好、结构简单紧凑。但由于工程材料的磁致伸缩量有限,该类机构所提供的位移量很小,如100mm长的铁钴钒棒,磁致伸缩只能伸长7μm,因而该类机构适用于精确位移调整、切削刀具的磨损补偿及自动调节系统。
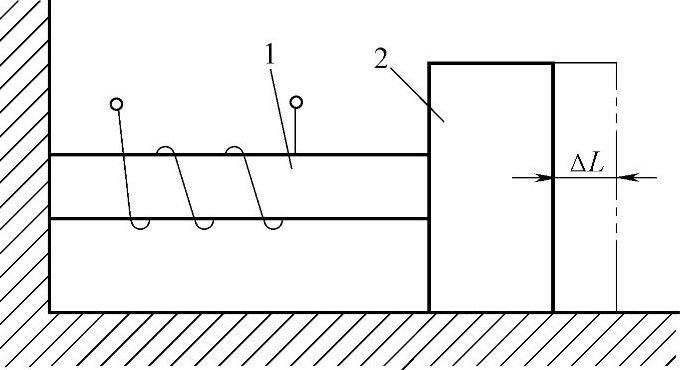
图2-30 磁致伸缩式微动执行机构工作原理
1—磁致伸缩棒 2—运动件
(3)压电陶瓷式
压电陶瓷式微动执行机构是利用压电材料的逆压电效应产生位移的。一些晶体在外力作用下会产生电流,反过来在电流作用下会产生力或变形,这些晶体称为压电材料,这种现象称为压电效应。压电效应是一种机械能与电能互换的现象,分为正压电效应和逆压电效应。对压电材料沿一定的方向施加外力,其内部会产生极化现象,在两个相对的表面上出现正负相反的电荷,这种现象称为正压电效应;相反,沿压电材料的一定方向施加电场,压电材料会沿电场方向伸长,这种现象称为逆压电效应。工程上常用的压电材料为压电陶瓷,如图2-31所示。利用压电陶瓷的逆压电效应可以做成压电微动执行器件。对压电器件要求其压电灵敏度高、线性好、稳定性好和重复性好。
压电器件的主要缺点是变形量小,为获得需要的驱动量常要加较高的电压,一般大于800V。压电陶瓷长度方向变形量为

式中 U——施加于压电器件上的电压;
b——压电陶瓷厚度;
L——压电陶瓷长度;
d——压电系数。

图2-31 压电陶瓷
由上式可以看出,增大压电陶瓷所用方向的长度、减少压电陶瓷厚度、增大外加电压、选用压电系数大的材料均可以增大压电陶瓷长度方向变形量。另外,也可用多个压电陶瓷组成压电堆,采用并联接法,以增大伸长量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。