



由于三种伺服电动机的出现,也因此产生了三种伺服驱动系统:即步进伺服驱动系统、直流伺服驱动系统和交流伺服驱动系统。
1.步进伺服驱动系统
步进电动机的运行性能,不仅与步进电动机本身和负载有关,而且与配套的驱动装置有着十分密切的关系。步进电动机驱动装置由环形脉冲分配器、功率放大驱动电路两大部分组成,如图3-68所示。其中,步进电动机驱动电路完成由弱电到强电的转换和放大,也就是将逻辑电平信号变换成电动机绕组所需的具有一定功率的电流信号。
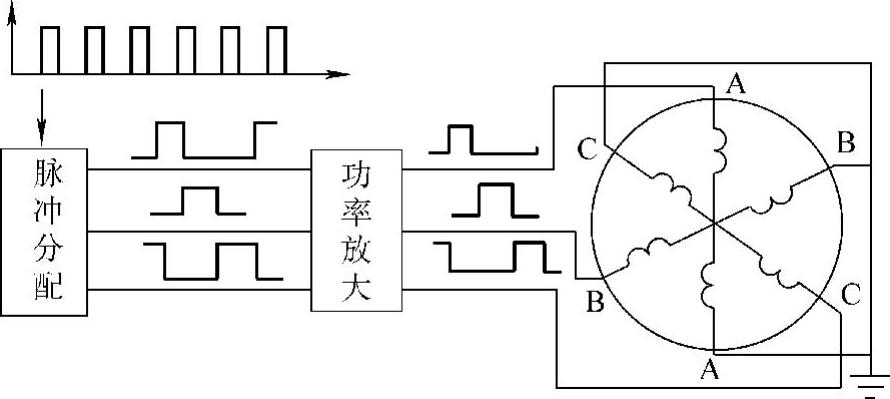
图3-68 步进电动机控制电路
(1)步进电动机的驱动电路
一般要求,驱动电路能够提供足够幅值、前后沿较陡的励磁电流,而且功耗小、效率高、运行稳定可靠、易于维护。常见的步进电动机驱动电路形式有以下几种。
1)单电源串电阻驱动电路 单电源串电阻驱动电路如图3-69所示。脉冲分配器输出脉冲到控制信号端后,通过脉冲放大器放大,加到晶体管VT的基极,使其导通,并利用电容C使电动机绕组中的电流迅速上升。在稳态时,串联电阻R起限流作用。在换相时,晶体管VT截止,利用二极管VD的续流作用,防止绕组电感电流不能突变而在VT集电极产生高电压击穿。这种电路适用于小型步进电动机,且性能要求不高的场合。
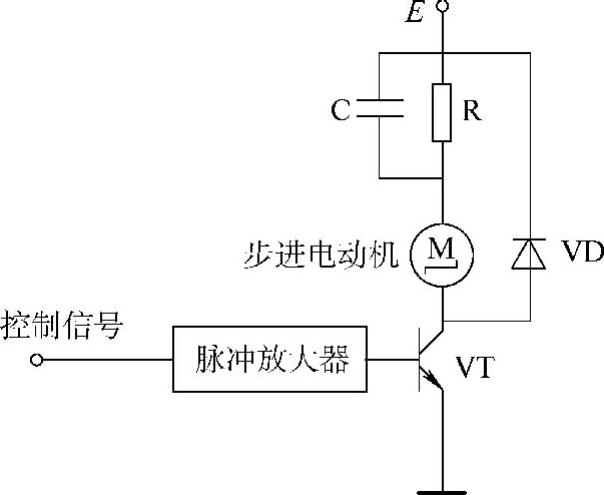
图3-69 单电源串电阻驱动电路
2)高低压切换型驱动电路 电路及波形如图3-70所示。这种电路的特点是高压充电,低压维持。步进电动机的绕组每次通电时,首先接通高压,以保证电流以较快的速度上升;然后改由低压供电,维持绕组中的电流为额定值。
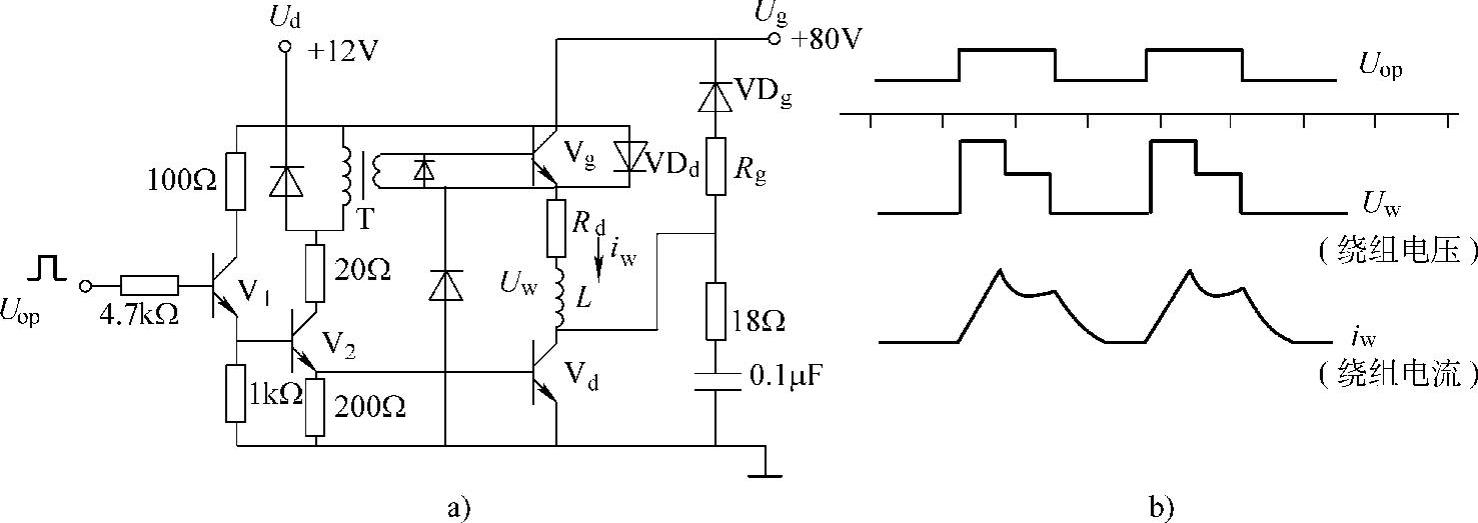
图3-70 高低电压驱动电源
a)电路 b)波形
图3-70中,由脉冲变压器T组成了高压控制电路。当输入信号为低电平时,V1、V2、Vg、Vd均截止,电动机绕组中无电流通过。当输入信号为高电平时,V1、V2、Vd饱和导通,在V2由截止过渡到饱和导通期间,与T一次侧串联在一起的V2集电极回路的电流急剧增加,在T的二次侧产生感应电压,加到高压功率管Vg的基极上,使Vg导通。80V的高压经功率管Vg加到步进电机绕组上,使电流按La/(Rd+r)的时间常数上升,达到电流稳定值Ug/(Rd+r)。经过一段时间,当V2进入稳定状态(饱和导通)后,T一次电流暂时恒定,无磁通量变化,T二次侧的感应电压为零,Vg截止。这时12V低压电源经二极管VDd加到绕组La上,维持Ld中的额定电流不变。
当输入的脉冲结束后,V1、V2、Vg、Vd截止,储存在La中的能量通过Rg、VDg及Ug、Ud构成放电回路,Rg使放电时间常数减小,电流迅速减小为0,改善电流波形的后沿。
该电路由于采用高压充电,电流增长加快,绕组上脉冲电流的前沿变陡,使电动机的转矩、起动及运行频率都得到提高。又由于额定电流由低电压维持,故只需较小的限流电阻,功耗较小。
该电路为一相绕组的驱动电路,若要驱动三相步进电动机,则需三组这样的驱动电路。此外,电路中的高低压切换也可通过定时来控制。在每一个步进脉冲到来时,高压脉宽由定时电路控制,宽度是一定的,也叫作高压定时控制驱动电源。
3)恒流斩波型驱动电路 单电源斩波型驱动电路如图3-71所示。当输入信号为低电平时,VT截止,电动机绕组中无电流通过;当输入信号为高电平时,VT导通,由于绕组回路没有串接限流电阻,所以绕组中电流迅速上升。当绕组中电流上升到预定值时,由于R1的反馈作用,通过斩波电路使VT截止,绕组中电流迅速下降;当下降到预定值以下时,又由于R1的反馈作用,通过斩波电路使VT导通,绕组电流又上升。如此反复进行,形成一个在预定值上下波动的电流波形,近似恒流。这种电路功耗小,效率高,运行特性好。
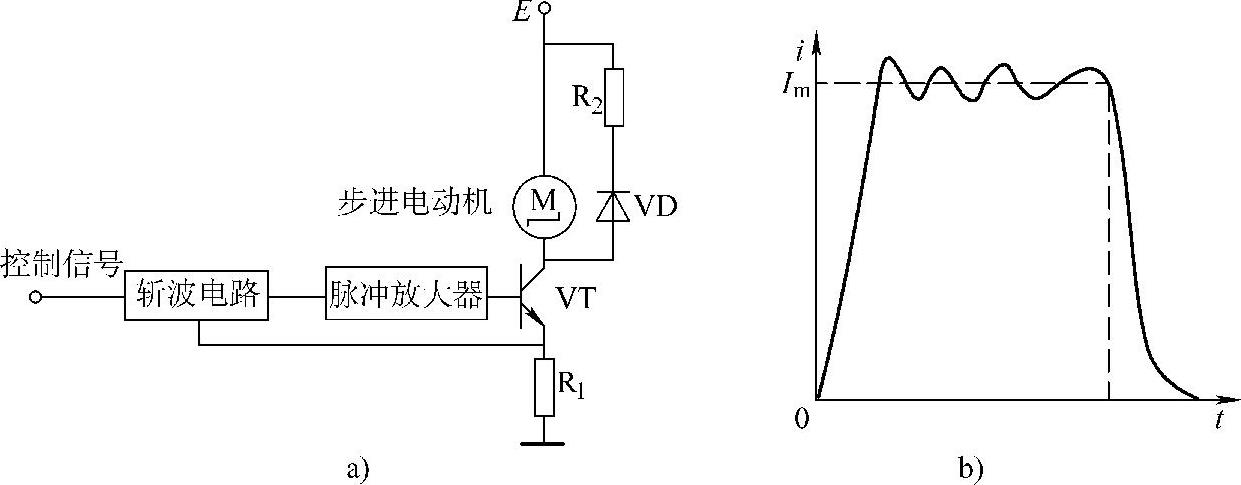
图3-71 单电源斩波型驱动电路
a)电路 b)电流波形
4)分频段调压驱动电路 由于在低频时,节拍脉冲比较宽,有足够的绕组电流上升时间,只需较小的限流电阻和较低的电源电压,即可达到额定电流;在高频时,节拍脉冲变窄,在限流电阻不变的情况下,需要较高的电源电压,使绕组电流迅速上升,以提高高频时步进电动机的带载能力。通常,把输入脉冲的频率分为几个频段,每段工作电压不同。高频段采用较高的电压,低频段采用较低的电压。
5)细分控制驱动电路 在实际应用中,为了进一步提高进给运动的分辨率,在不改变步进电动机结构的前提下,要求对步距角进一步细分。为了达到这一目的,可将绕组电流以阶梯波的方式输入,如图3-72所示。这时,电流分成多少个阶梯,则转子就以同样的步数转过一个步距角。这样将一个步距角细分成若干步的驱动方法称为细分驱动电路。
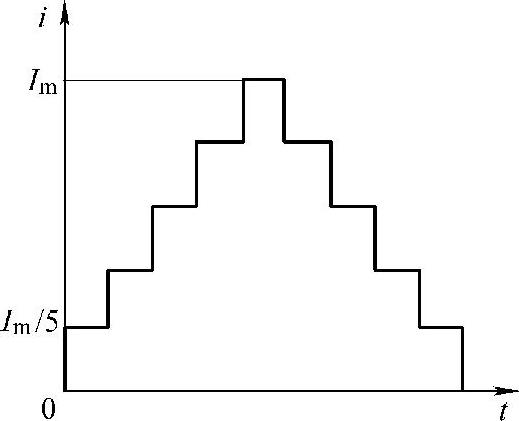
图3-72 细分控制驱动电路绕组电流波形
(2)脉冲分配器
脉冲分配器用来控制步进电动机的运行通电方式。在数控系统中,就是将数控装置送来的一串指令脉冲,按照运行通电方式所要求的顺序和分配规律,分配到各相驱动电路输入端,用以控制各相绕组中电流的开通和关断。由于步进电动机有正反转要求,所以脉冲分配器的输出既是周期性的,又是可逆的,因此又叫环形脉冲分配器。图3-73所示为三相三拍制步进电动机环形分配器的结构框图及输入输出关系。脉冲分配器有硬件和软件两种实现形式。
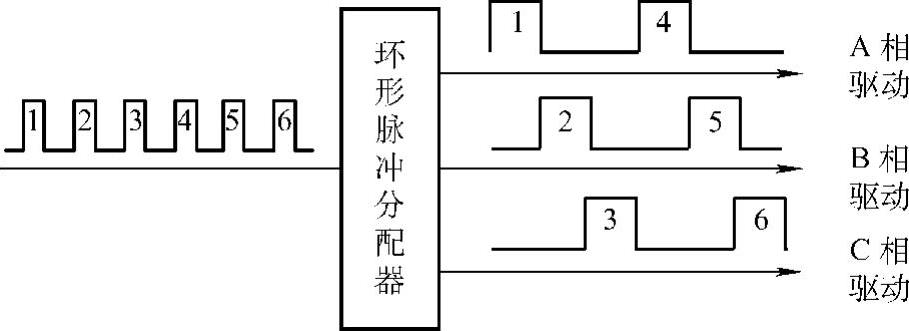
图3-73 三相环形脉冲分配
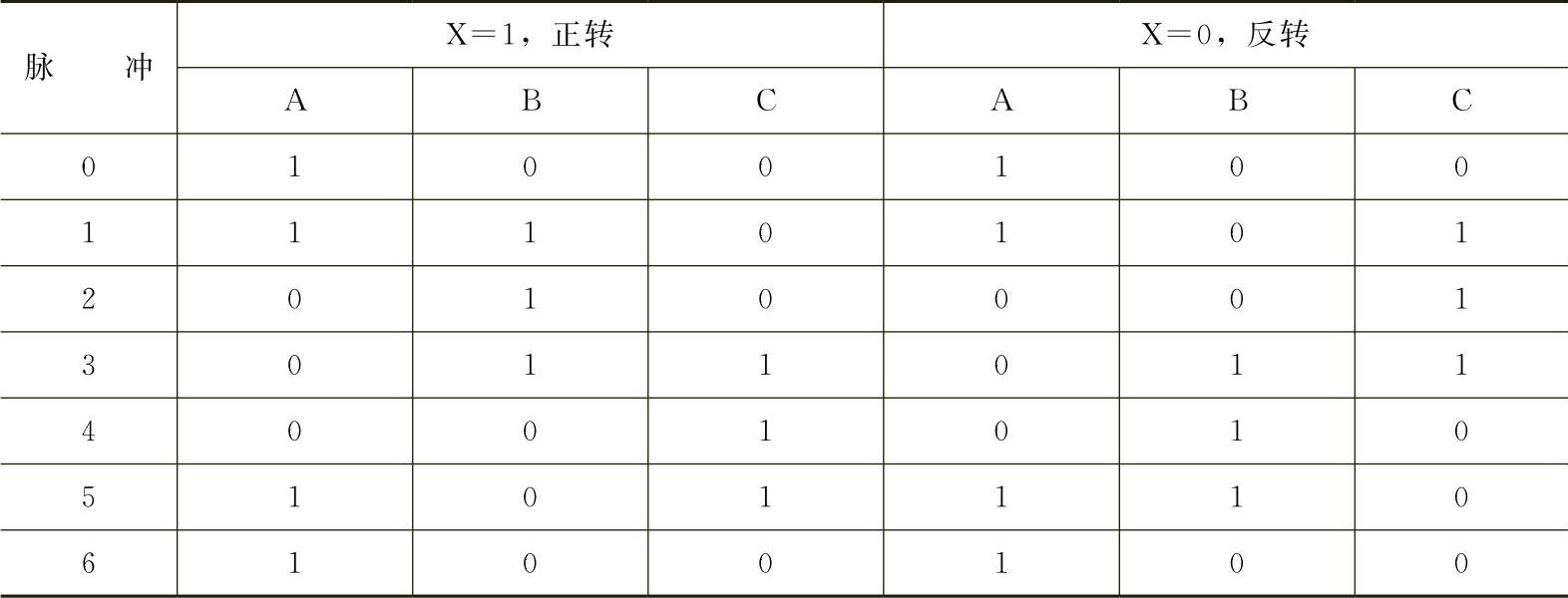
1)硬件脉冲分配器 硬件脉冲分配器由逻辑门电路和触发器构成。图3-74所示为三相六拍环形脉冲分配器原理图。当X=“1”时,每来一个脉冲(CP)则电动机正转一步,分配顺序为:A→AB→B→BC→C→CA→A;当X=“0”时,每来一个脉冲(CP)则电动机反转一步,分配顺序为:A→AC→C→CB→B→BA→A。输出状态真值表如表3-9所示。
硬件脉冲分配器也可采用专用集成芯片实现硬件环分,如CH250就是为三相步进电动机设计的环形脉冲分配器。该芯片采用CMOS工艺,可靠性高,可工作于单三拍、双三拍、三相六拍等方式。如图3-75所示为三相六拍脉冲分配电路的接线图。步进电动机的初始励磁状态为AB相,当进给脉冲CP的上升沿有效,并且方向信号为“1”则正转,为“0”则反转。
显然,对于相数不同、通电方式不同的步进电动机,必须重新设计或选用不同的硬件分配电路。因此,硬件脉冲分配器缺乏灵活性。
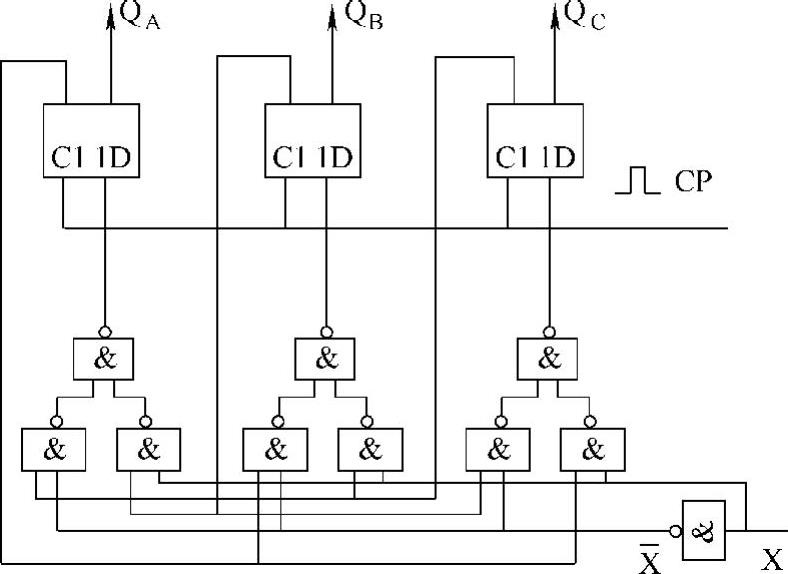
图3-74 三相六拍脉冲分配器(https://www.xing528.com)
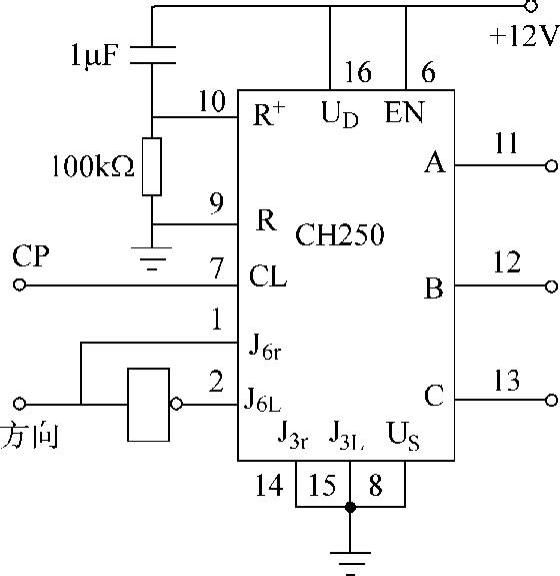
图3-75 CH250实现的三相六拍脉冲分配电路
表3-9 三相六拍脉冲分配器输出状态真值表
2)软件脉冲分配 为了提高脉冲分配器的灵活性,也可用软件来实现环形脉冲分配。图3-76所示为89C51单片机与步进电动机驱动电路的接口框图。P1口的3个引脚经过光电隔离后,将节拍脉冲信号加到驱动电路的输入端,从而控制三相绕组的通电顺序。一般采用“查表法”编写脉冲分配程序,即按步进电动机通电顺序求出脉冲输出状态字状态表,并将其存入EPROM中,然后根据步进电动机的运转方向,按表地址正向或反向地取出该地址中的状态字进行输出,即可控制步进电动机正向或反向地旋转起来。
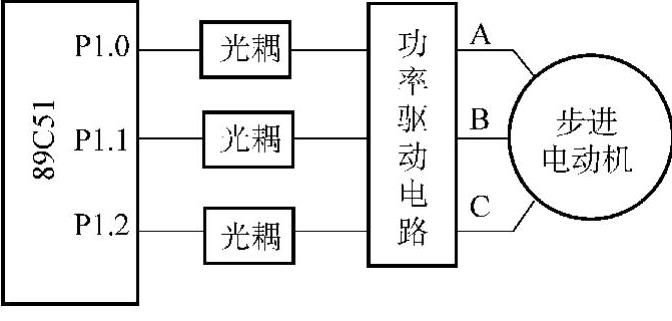
图3-76 单片机控制的三相步进电动机驱动电路框图
2.直流伺服驱动系统
直流伺服驱动系统的主要作用是把来自CNC装置的信号进行功率放大,以驱动伺服电动机转动,并根据来自CNC装置的信号指令,调节伺服电动机的速度。一般结构框图如图3-77所示。直流伺服驱动装置一般采用调压调速方式,按功率放大电路元件的不同,可分为晶闸管(VTH)直流伺服驱动系统和晶体管脉宽调制(PWM)直流伺服驱动系统两大类。
(1)晶闸管(VTH)直流伺服驱动系统
晶闸管直流伺服驱动系统的主电路采用晶闸管三相全控桥式可逆整流电路,根据限制环流的办法不同,又可分为以下两种电路结构。
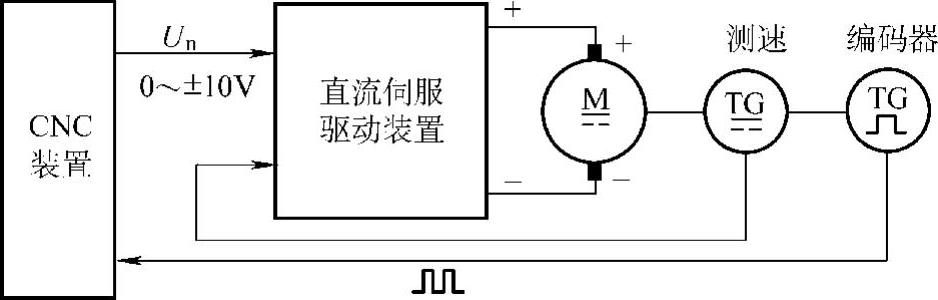
图3-77 伺服驱动系统结构框图
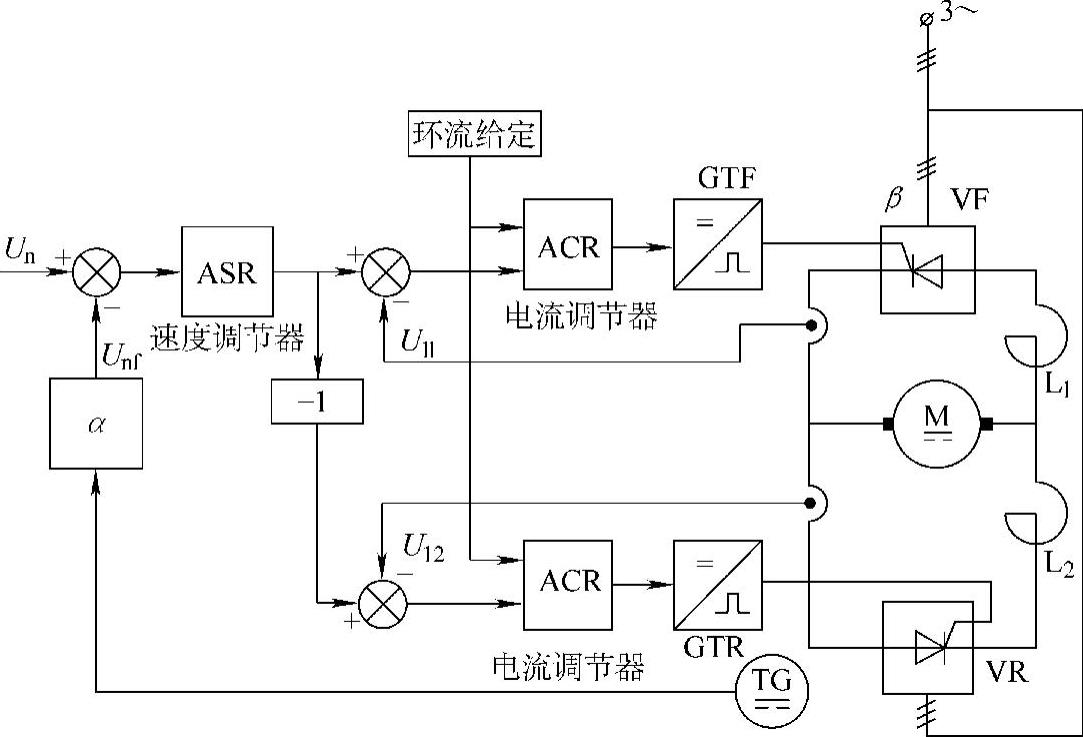
图3-78 环流可控直流伺服驱动系统结构框图
①环流可控可逆直流伺服系统。
这种电路结构框图如图3-78所示。在两组反并联的整流桥之间加限流电抗器L1~L2(平波电抗器),并通过两路电流反馈,把环流控制在一定范围之内。由于这种电路的两组整流桥始终处在工作状态,电流反向时,由一组整流桥切换到另一组整流桥时的过程比较快速,也比较安全;在电动机加减速或改变方向时,反应快速。但是,由于要用平波电抗器,体积较大、复杂、笨重。
②逻辑无环流可逆直流伺服驱动系统。
这种电路结构框图如图3-79所示。该电路通过无环流逻辑控制器DLC控制两组整流桥的开通与封锁,使得在一组整流器工作时,把另一组整流器的触发脉冲封锁,使它不通电,这样也就不会出现环流了。由于这种电路无需平波电抗器,体积小,结构简单,在数控机床上应用较为广泛。但是,由于在一组整流桥工作时,另一组是封锁的,电流反向时两组整流器之间的切换比较费时,必须在前一组整流器的电流衰减到零,所有晶闸管完全关断的情况下才能开放另一组整流器,即存在换相死区,对快速性有一定的影响。
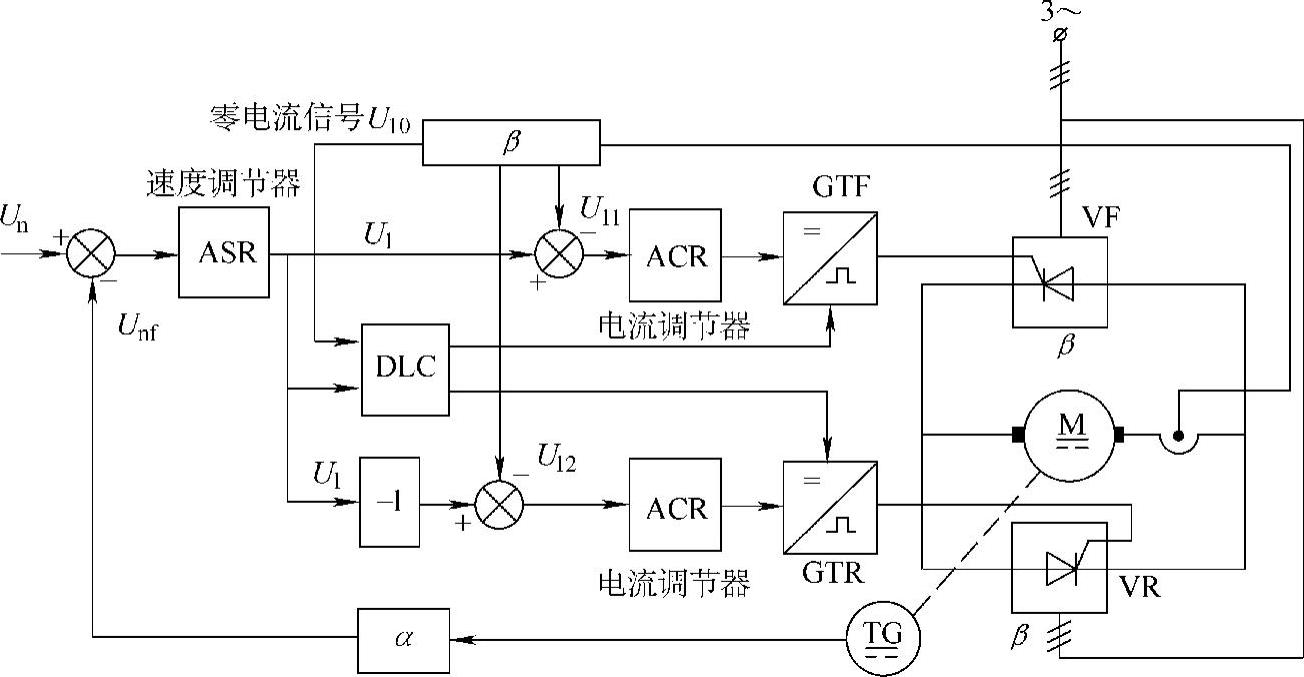
图3-79 逻辑无环流直流伺服驱动系统结构框图
(2)晶体管脉宽调制(PWM)直流伺服驱动系统
晶体管调制直流伺服驱动系统的主电路,由H型桥式大功率晶体管(GTR、IGBT等)驱动模块构成。它利用大功率晶体管器件的开关作用,将直流电源电压转换成较高频率(一般为数千Hz以上)的方波电压,并加在直流电动机的电枢上,通过对方波脉冲宽度的控制,改变加在电枢上的平均电压Ua,从而调节电动机的转速。其电路结构如图3-80所示。
与晶闸管直流伺服驱动系统相比,晶体管调制直流伺服系统有以下优点:主电路功率器件少,线路简单;开关频率高,电流容易连续,低速性能好,稳速精度高,调速范围宽;系统频带宽,快速响应性能好,动态抗扰能力强;直流电源采用三相不可控整流时,电网功率因数高,对电网冲击小。因此,该系统在数控系统中应用较为广泛。
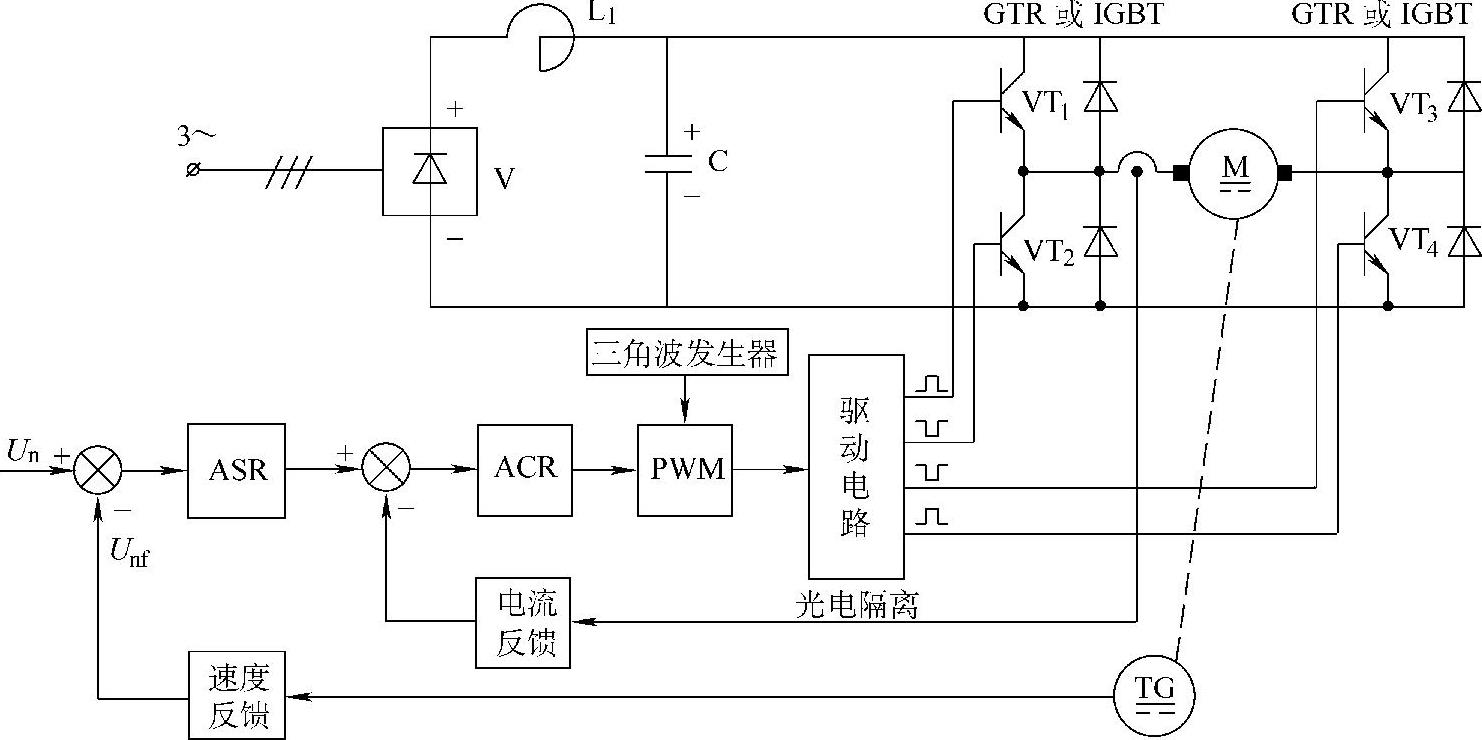
图3-80 晶体管PWM直流伺服驱动系统结构框图
3.交流伺服驱动系统
数控系统的交流伺服驱动系统以三相永磁同步交流伺服电动机为执行元件。从换向电路的控制方法分,同步电动机的驱动电路可以分为他控换向和自控换向两大类。和异步电动机变频调速一样,用独立的变频装置给同步电动机提供变压变频电源,称他控换向交流伺服驱动系统;用电动机转子位置传感器信号来控制换向变频的,是自控换向交流伺服驱动系统。数控机床用的交流伺服驱动系统一般是自控换向交流伺服驱动系统。
自控换向交流伺服驱动系统的主要组成结构如图3-81所示。它通过电动机轴端上的转子位置检测器BQ(如霍尔开关)发出的信号来控制逆变器的换流,从而被动地改变同步电动机的供电频率;并根据外部速度给定信号,以PWM方式控制逆变脉冲宽度,改变输出到电动机定子绕组上的电压,从而调节同步电动机的转速。
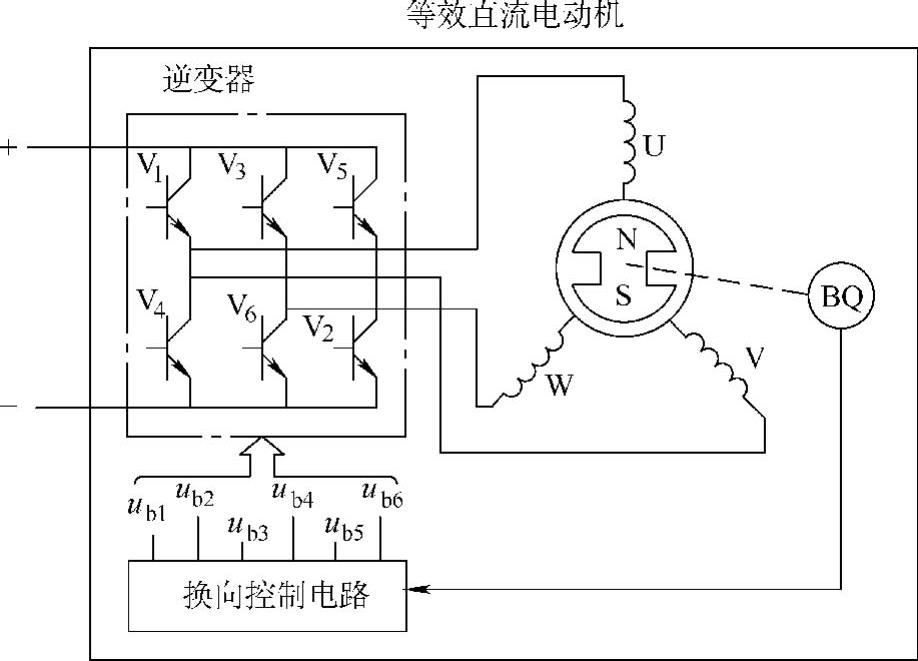
图3-81 自控换向交流伺服驱动组成结构
图3-82所示为西门子SIMODRIVE 611A交流进给伺服驱动装置原理图。
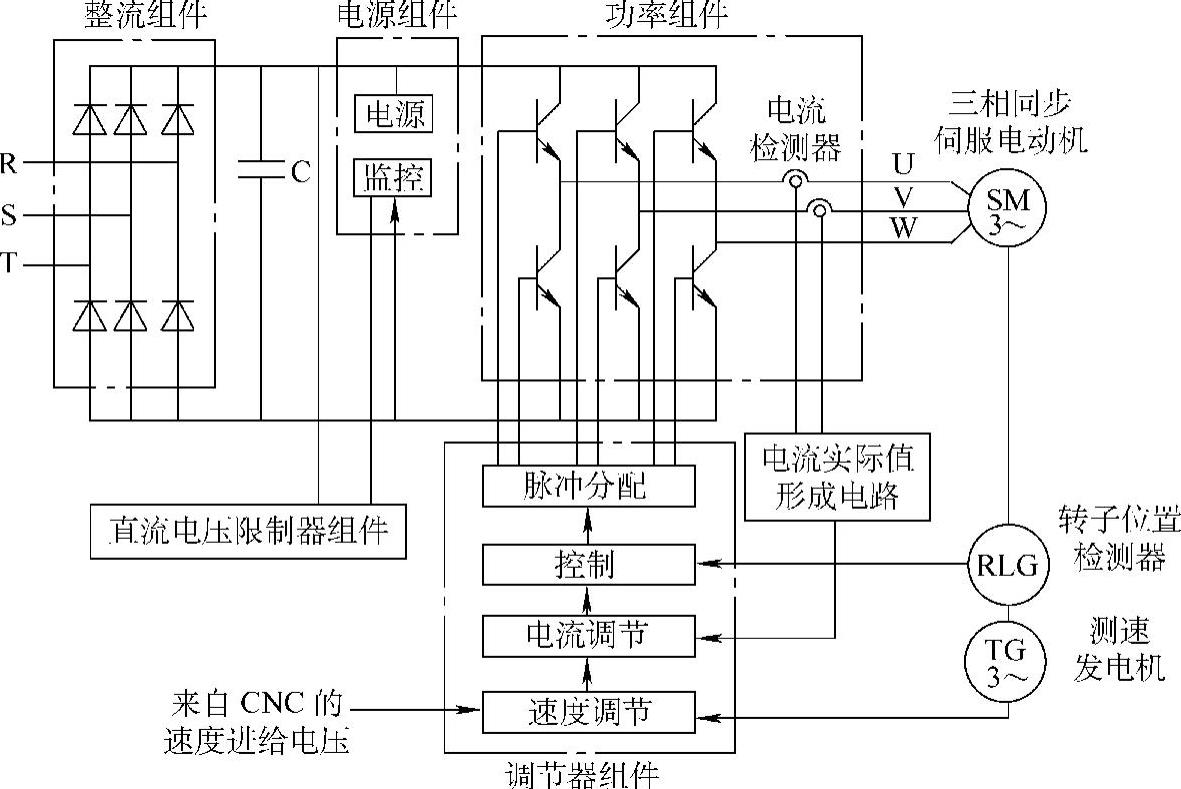
图3-82 SIMODRIVE 611A交流进给伺服驱动装置原理图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。