



1.步进电动机的特点
步进电动机是一种将电脉冲信号转换成相应角位移的机电执行元件。给一个电脉冲信号,电动机就回转一个固定的角度,称为一步,所以称其为步进电动机。由于步进电动机的转动角度由脉冲个数控制,不需要反馈环节,所以在经济型数控机床上应用较多。
(1)步进电动机的优点
①转子的角位移量和转速严格受脉冲的数量和频率控制,有脉冲就走,无脉冲则停,旋转方向由通电顺序决定。
②体积小,重量轻,价格低。
③驱动简单,工作可靠,误差不长期积累。
④精度高,惯性小,容易调试。
(2)步进电动机的主要缺点
①使用不当时,会引起“失步”或“过冲”。
②运转时有振动和噪声。
③额定转速较低,最高频率一般不超过18kHz。
2.步进电动机的分类
步进电动机的品种规格很多,通常可以分为反应式步进电动机、永磁式步进电动机和混合式步进电动机三种类型。
反应式步进电动机的定子和转子由硅钢片或其他软磁材料制成,定子上有励磁绕组,绕组相数一般为二、三、四、五、六相,步距角一般为0.36°~3°。反应式步进电动机结构简单、价格便宜、步距角小,其缺点是励磁电流大、带惯性负载能力差、容易“失步”和“振荡”、断电后无保持转矩。其产品系列代号为BF,例如110BF02、110BF03、130BF5、150BF5、160BF5等。
永磁式步进电动机的定子由软磁材料制成,定子上有励磁绕组,转子由永久磁铁制成,步距角一般为15°、22.5°、30°、45°等。永磁式步进电动机控制功率小、省电、运行稳定、断电后有保持转矩,但是其步距角太大。其产品系列代号为BY。
混合式步进电动机又叫永磁反应式步进电动机,它在结构和性能上兼有反应式步进电动机和永磁式步进电动机两者的特点,即具有反应式步进电动机步距角小、工作频率高的特点,又具有永磁式步进电动机控制功率小、运行稳定、断电后有保持转矩的特点,更适合应用于数控系统中,但是其制造工艺复杂、成本较高。其产品系列代号为BH。
3.步进电动机的工作原理
(1)反应式步进电动机工作原理
三相反应式步进电动机外形结构如图3-59所示。其定子上有A、B、C三对磁极,分别绕有A、B、C三相绕组,三对磁极在空间上相互错开120°;转子上有20个齿,没有绕组,每个齿在空间上相隔18°,它在定子磁场中被磁化而呈现极性。当A相磁极与转子齿对齐时,B相磁极与转子齿错开18°/3=6°,C相磁极与转子齿错开(2×18°)/3=12°。
步进电动机是在电磁吸力作用下产生位移的。当某相定子励磁后,该相定子磁极吸引转子,转子的齿与该相定子磁极上的齿对齐,转子转动一个角度;下一相定子通电励磁时,转子又转过一个角度,每相不停地轮流通电,转子就不停地转动。为便于理解,现以图3-60所示的反应式步进电动机为例,分析其转动原理。该步进电动机转子齿数为4,齿距为90°,当A相磁极与转子齿对齐时,B相磁极与转子齿错开90°/3=30°,C相磁极与转子齿错开(2×90°)/3=60°。
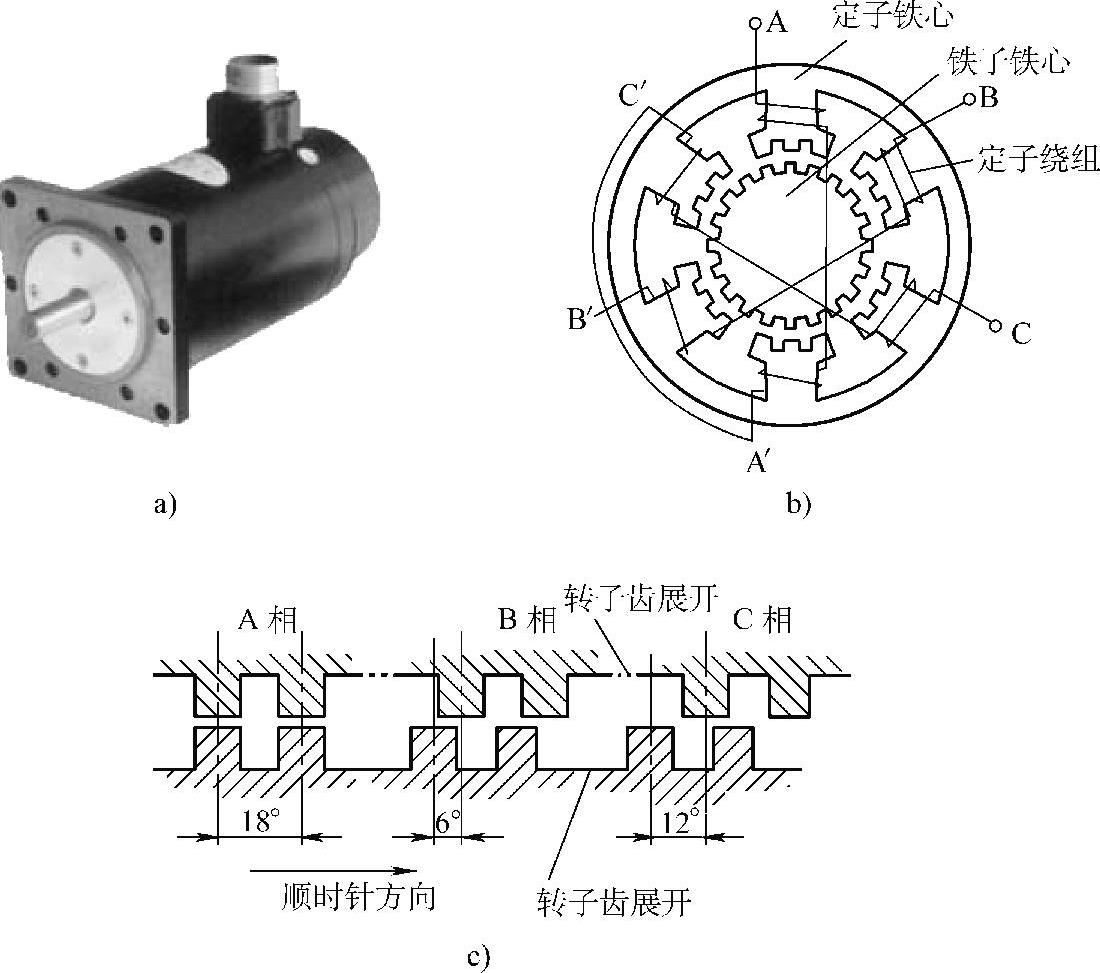
图3-59 三相反应式步进电动机外形结构图
a)外形图 b)横切面图 c)展开图
如图3-60a所示为给各相定子绕组接通直流电源。当A相绕组通电时,形成以A-A'为轴线的磁场,转子受电磁吸力作用而产生转矩,使转子的1、3齿和定子的A-A'磁极对齐,如图3-60b所示;当A相断电、B相绕组通电时,以B-B'为轴线的磁场使转子的2、4齿和定子的B-B'磁极对齐,转子将在空间逆时针转过30°角;当B相断电、C相绕组通电时,以C-C'为轴线的磁场使转子的1、3齿和定子的C-C'磁极对齐,转子将在空间沿逆时针转过30°角。如此按A→B→C→A的顺序通电,转子就会不断地按逆时针方向转动;如按A→C→B→A的顺序通电,转子就会不断地按顺时针方向转动。从一相通电换到另一相通电,叫一拍;每一拍转子转动一步,每步转过角度叫步距角,用α表示。步距角越小,位置精度越高。步距角的大小与转子齿数、定子绕组相数以及通电方式有关。对于定子相数为m、转子齿数为Z、通电方式系数为K的步进电动机,其步距角为
步进电动机的通电方式有以下三种。
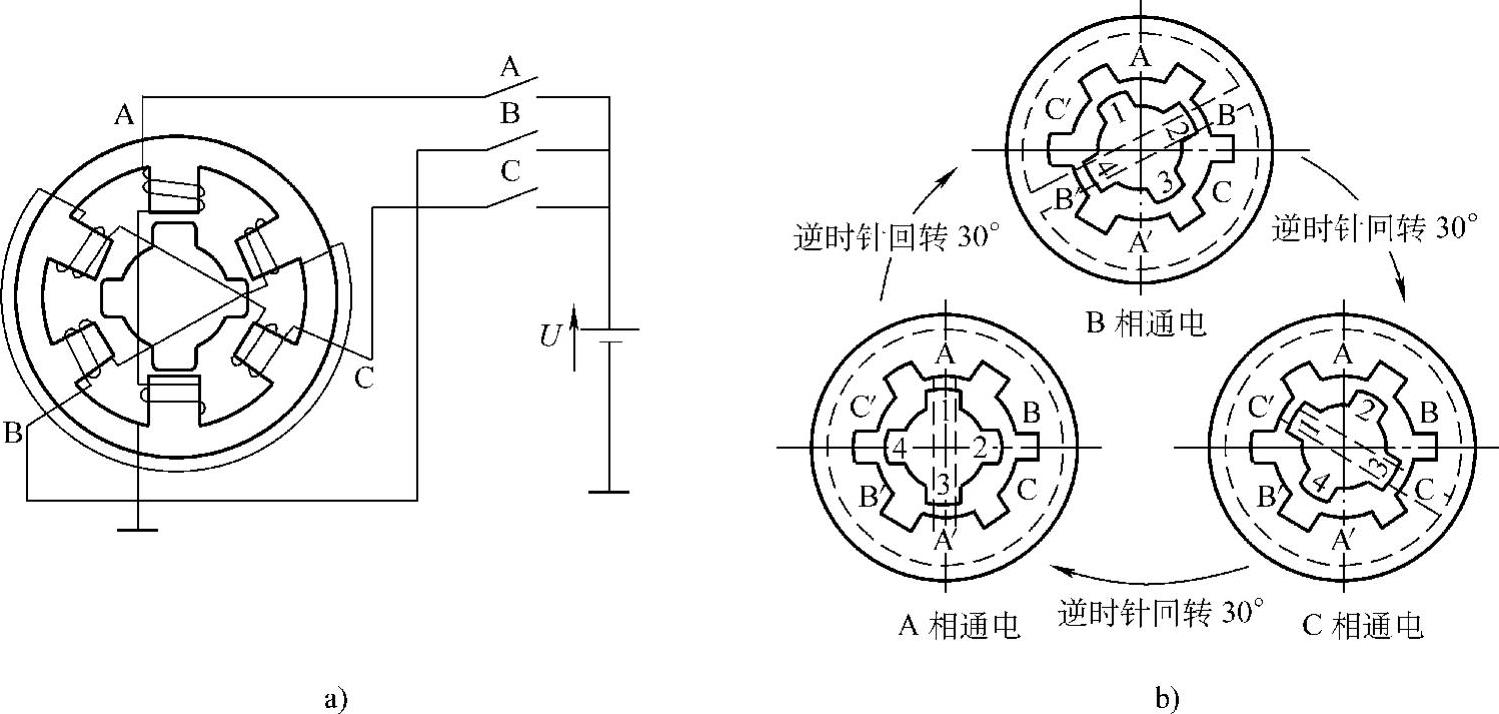
图3-60 反应式步进电动机工作原理
a)电路图 b)工作原理图
1)单拍 在上述各相轮流通电过程中,每拍只有一相通电,称为单拍。对于m相步进电动机,一个循环为m拍,称为m相单m拍工作制,通电方式系数K=1。如上例中,为三相单三拍工作制。单拍工作制的稳定性较差,容易失步。
2)双拍 采用双相轮流通电方式,即每拍都有两相通电,称为双拍。对于m相步进电机,一个循环仍为m拍,称为m相双m拍工作制,通电方式系数K=1。如三相步进电动机的通电顺序为AB→BC→CA→AB,构成三相双三拍工作制。由于这种通电方式是两相同时通电,力矩大,定位精度高,每拍只改变一相,另一相锁定,不易失步。
3)单双拍 即单双相轮流通电。如对三相步进电动机来说,通电顺序为A→AB→B→BC→C→CA→A,一个循环为6拍,是单拍时的2倍,称为三相六拍工作制。对于m相步进电动机,一个循环为2m拍,称为m相2m拍工作制,通电方式系数K=2。
由此看出,转子齿数为4的步进电动机在三相三拍时 ,三相六拍时
,三相六拍时 ;而转子齿数为20的步进电动机在三相三拍时
;而转子齿数为20的步进电动机在三相三拍时 °,三相六拍时
°,三相六拍时 。说明定子磁极对数和转子齿数越多,步距角就越小,但是由于受控制器复杂程度和制造工艺的限制,定子磁极对数和转子齿数不可能很多。一般地,相数为三到五相,步距角在0.36°~3°范围内的步进电动机较为常用。
。说明定子磁极对数和转子齿数越多,步距角就越小,但是由于受控制器复杂程度和制造工艺的限制,定子磁极对数和转子齿数不可能很多。一般地,相数为三到五相,步距角在0.36°~3°范围内的步进电动机较为常用。
(2)永磁式步进电动机工作原理
永磁式步进电动机如图3-61a所示,定子上有两相(或多相)绕组,转子为两对(或多对)永久磁铁制成的磁极,转子磁极数与每相定子绕组磁极数相同。图3-61b画出的是两相两对磁极的绕组(AO、BO),转子为两对永久磁极。当定子绕组按A→B→-A→-B→A的顺序轮流通电时,转子将按顺时针转动,步距角为45°。步距角的计算公式为
式中,m——拍数,p——转子磁极对数。(https://www.xing528.com)
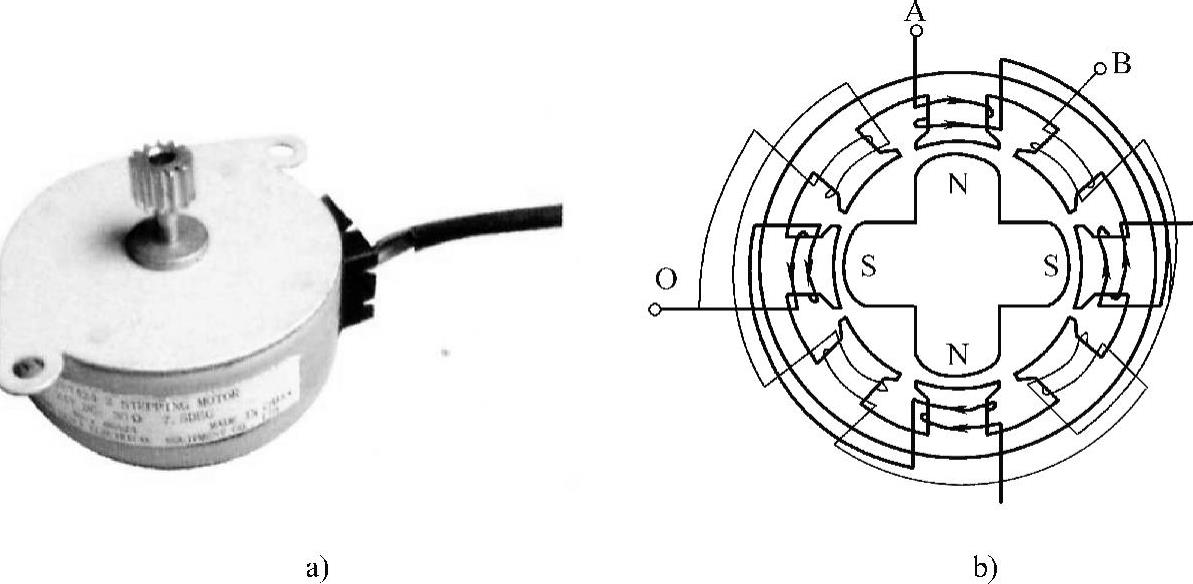
图3-61 永磁式步进电动机外形结构图
a)电动机外形 b)电动机绕组
上述通电方式是两相四拍运行,它要求驱动器供给正负脉冲,否则电动机不能连续运行,这使得驱动器电路复杂化。若每相绕两套绕组,让其绕向相反,就构成了四相永磁步进电动机,可以简化对驱动器的要求,只需提供正脉冲即可连续运行,但是增加了用铜量,相同功率下电极尺寸也会较大。
(3)混合式步进电动机工作原理
混合式步进电动机外形结构如图3-62所示。它的定子结构与反应式步进电动机基本相同,也分成若干个磁极,磁极上绕有定子绕组,磁极端面有小齿。转子由环形永久磁铁及两段铁心组成,环形永久磁铁在转子的中部,轴向充磁,两段铁心分别装在永久磁铁的两端,转子铁心上也有如反应式步进电动机那样的小齿,但两段转子铁心上的小齿相互错开半个齿距,定转子小齿的齿距相等。
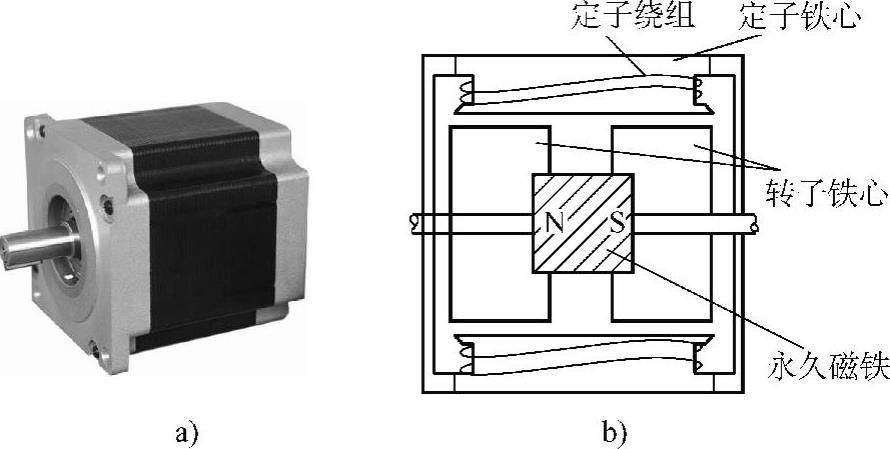
图3-62 混合式步进电动机外形结构图
a)电动机外形 b)电动机绕组
如图3-63所示为两相混合式步进电动机剖面图。定子有8个磁极,在空间上均匀分布,每相4个磁极,每相相邻磁极线圈绕向相反;转子有10个齿,在空间上均匀分布;定子绕组通电顺序为AA'→BB'→A'A→B'B→AA'。
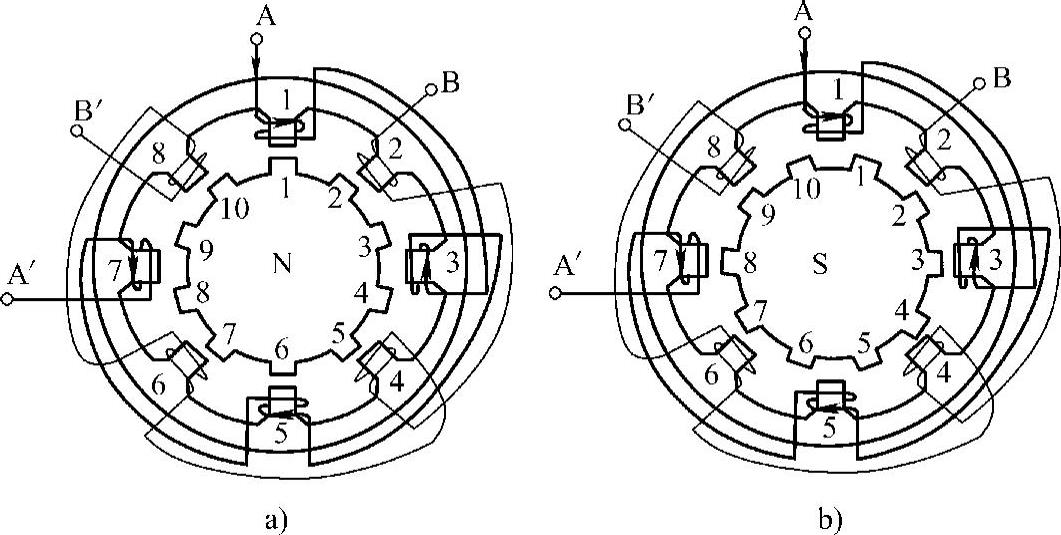
图3-63 混合式步进电动机剖面图
a)N段转子剖面 b)S段转子剖面
当定子绕组AA'通电时,定子的1、5号磁极为S极,3、7号磁极为N极;异性磁极相吸引,N段转子的1、6齿与定子1、5号磁极的齿对齐;同性磁极相排斥,N段转子的3、4齿与定子3号磁极的齿错开,8、9齿与定子7号磁极的齿错开。两段转子铁心上的齿相互错开半个齿距,S段转子的3、8齿与定子3、7号磁极的齿对齐;10、1齿与定子1号磁极的齿错开,5、6齿与定子5号磁极的齿错开。
当定子绕组BB'通电时,定子2、6号磁极为S极,4、8号磁极为N极;N段转子的2、7齿与定子2、6号磁极的齿对齐,其余各齿的对错情况可一次推出;转子顺时针转过9°。步距角的计算公式为
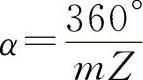
式中,m——拍数,Z——转子齿数。
4.步进电动机的主要特性
1)步距角α步进电动机每步转过的角度,称为步距角。在数控机床中,一般是根据其传动比例和系统脉冲当量的要求来选择步距角的。通常选用1.5°/0.75°、1.2°/0.6°、3°/1.5°等。
2)步距误差Δα指在空载情况下,理论的步距角与实际的步距角之差。它直接影响执行部件的定位精度,一般为±10'~±25'。
3)步距角特性 当保持定子某一相绕组通电,并且转子不带负载,则这时转子的齿与定子通电相的齿对齐,这时转子所受的磁力矩M=0,这个位置叫步进电动机的初始平衡位置。这时,如果在电动机轴上外加一个负载转矩ML,则转子会向ML方向转过一个角度θ,这时转子将受到电磁转矩M=ML的作用而达到新的平衡,角度θ称为失调角。设每两个齿之间的齿距角为θt,则转矩M与失调角θ之间的关系为
图3-64描述了转矩M和失调角θ间的关系,称为矩角特性。该特性上的电磁转矩最大值Mmax称为最大静转矩。在静态稳定区内,当外加转矩除去时,转子在电磁转矩作用下,仍能回到稳定平衡点位置。
4)距频特性 距频特性是指输出转矩M与运行频率f之间的关系,如图3-65所示。步进电动机的转矩随运行频率的上升而下降。
5)运行特性 步进电动机一般在连续脉冲的作用下运行,根据其对运行性能的影响,可将脉冲频率分为三个区段。
①低频区。步进电动机的运行为连续的单步运动。每次换相时,转子都要来回振荡若干次,如图3-66a所示。在这种情况下,电动机有较强的振动和噪声,但能运行可靠。
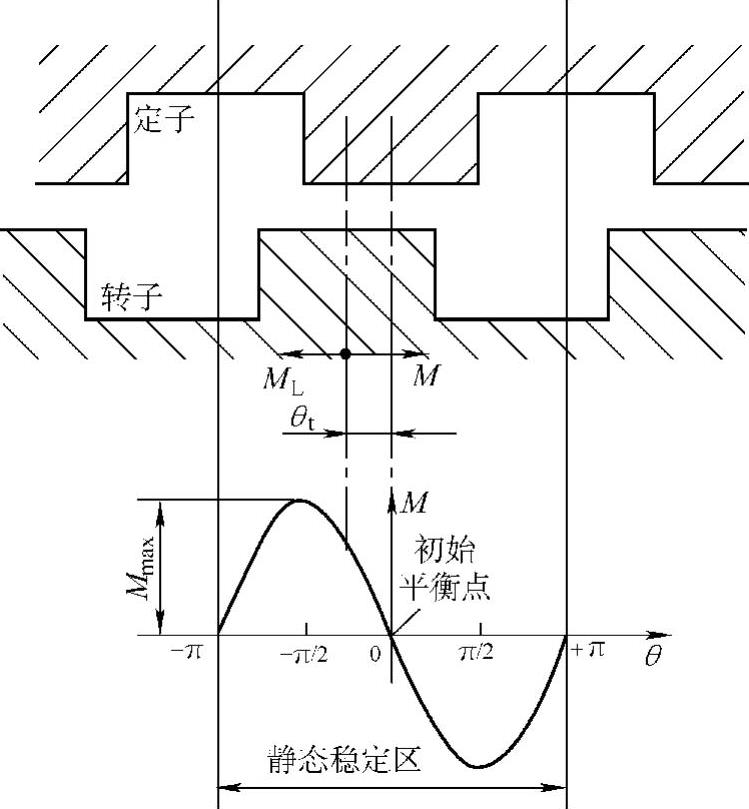
图3-64 步进电动机的矩角特性
②高频区。这时脉冲间隔短,在前一步还没有振荡结束时,后一个脉冲就已经到来,从而使步进电动机连续平滑的转动,运转比较平稳,如图3-66b所示。
③共振区。当脉冲频率介于低频和高频之间,而接近电动机本身的固有振荡频率时,电动机将产生强烈的振荡,甚至“走一步退两步”地左右摇摆,无法正常工作,这种情况应设法避免。
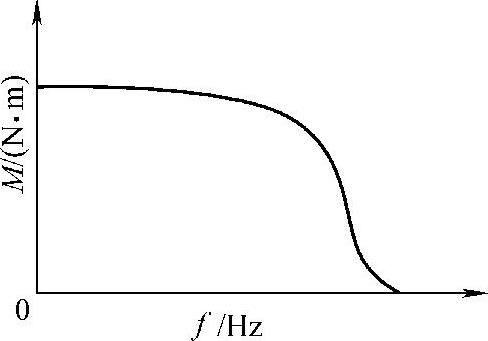
图3-65 步进电动机的矩频特性
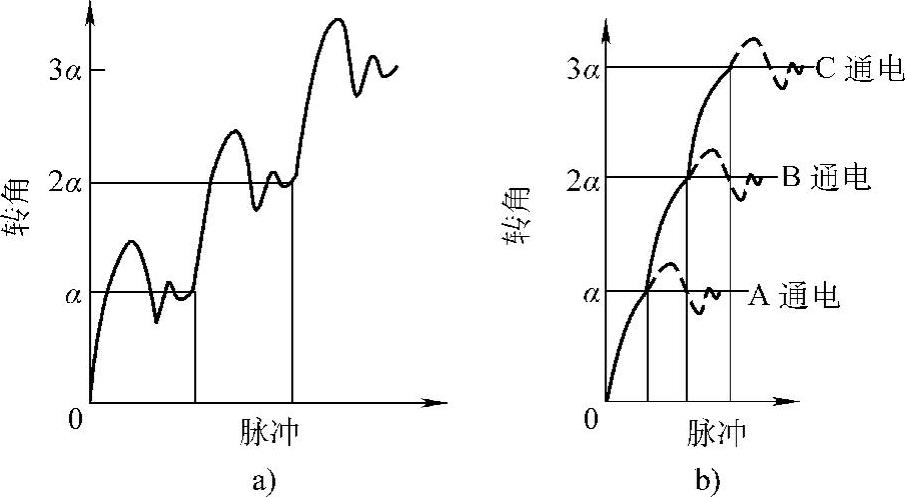
图3-66 步进电动机的运行特性
a)低频区 b)高频区
在实际使用中,步进电动机走的步数少于(或多于)节拍脉冲数的现象为“失步”现象。当电动机转矩选配不合理、负载阻力矩过大、加减速太快或工作在共振区时,都会引起“失步”。振荡和“失步”会引起进给失败,必须设法避免。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。