



1.零件加工程序的处理过程
零件加工程序在CNC装置内部的处理步骤如图3-8所示。
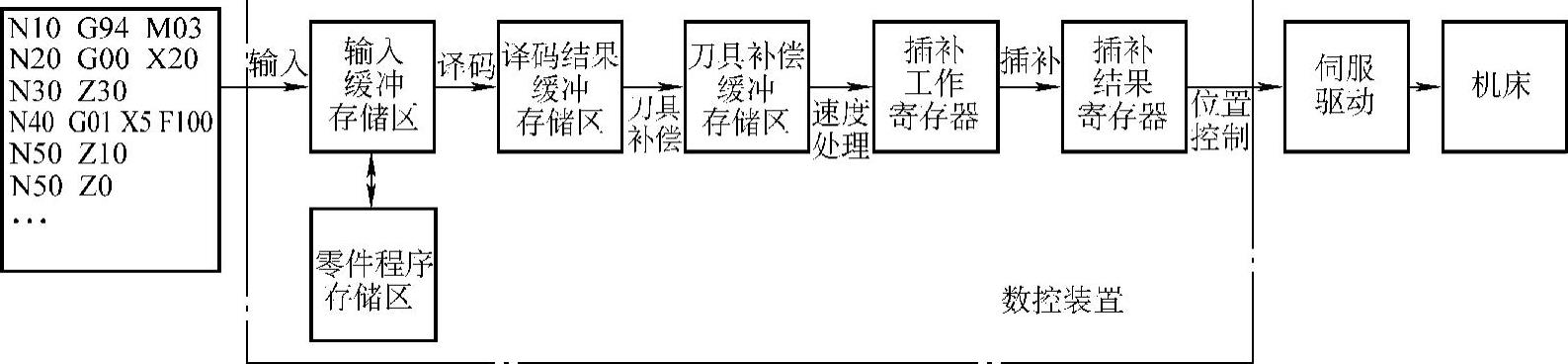
图3-8 数控零件程序的处理过程
(1)输入
通过键盘或其他输入途径将零件程序输入到CNC装置,并完成无效代码的删除、代码校验和代码转换。
(2)译码
将零件程序中的零件轮廓信息、进给速度信息和辅助开关信息翻译成统一数据格式,以方便后续处理程序的分析、计算。在译码过程中,还要对程序段进行语法检查。
(3)刀具补偿
将编程轮廓轨迹转换为刀具中心轨迹,保证刀具按其中心轨迹移动,以便加工出所要求的零件轮廓,并实现程序段之间的自动转换。
(4)进给速度处理
根据编程进给速度确定脉冲源频率或者确定每次插补的位移增量,以保证各坐标方向运动的合成速度满足编程速度的要求。
(5)插补
在已知曲线的类型、起点、终点和进给速度的条件下,在曲线的起点和终点之间补足中间点的过程。
(6)位置控制
在每个插补周期内,将插补输出的指令位置与实际位置相比较,用差值控制伺服驱动装置带动机床刀具相对于工件运动。
2.数控加工程序的输入
常用的程序输入装置有MDI键盘、纸带阅读机、串行通信接口以及以太网接口等。其中,MDI键盘是手动数据输入(Manual Data Input)键盘的简称,是数控系统中最常用的输入装置之一,主要用于手工输入不太复杂的零件程序。纸带阅读机是早期的数控系统所采用的输入装置,用来读取以穿孔纸带为介质的零件程序。它采用光电转换技术,将纸带上记录的信息(有孔或无孔)转换成相应的电信号,经过放大、整形后送入数控装置,供数控装置读入。
现代数控系统都带有标准串行通信接口,能够方便地与微型计算机相连,进行点对点通信,实现零件程序和参数的传送。随着CAD/CAM、FMS及CIMS技术的发展,机床数控系统与计算机的通信显得越来越重要。
在串行通信中,广泛应用的标准是RS232C标准。它是美国电子工业协会(EIA)颁布的数据通信推荐标准。RS是Recommended Standard的缩写,232C是标准号。该标准定义了数据终端设备(DTE)和数据通信设备(DCE)之间连接信号的含义及其电压信号规范等内容。其中,DTE可以是计算机或数控系统,DCE一般指调制解调器(Modem)。其远程数据通信系统构成如图3-9所示。当两台计算机相距比较近时,可以省去电话线、调制解调器等中间环节,构成如图3-10所示的零Modem数据通信系统。
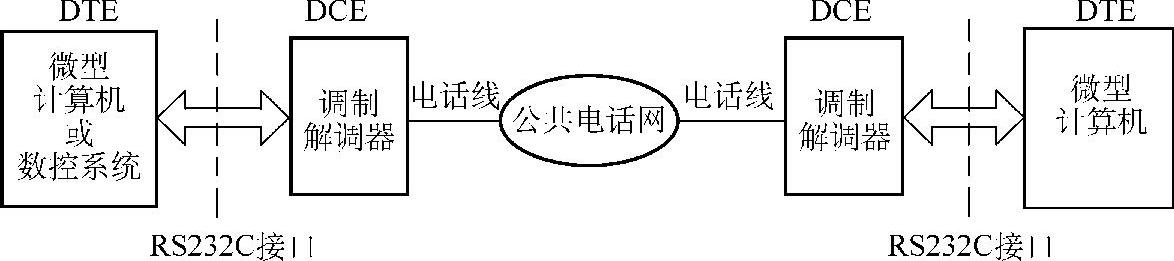
图3-9 远程数据通信系统
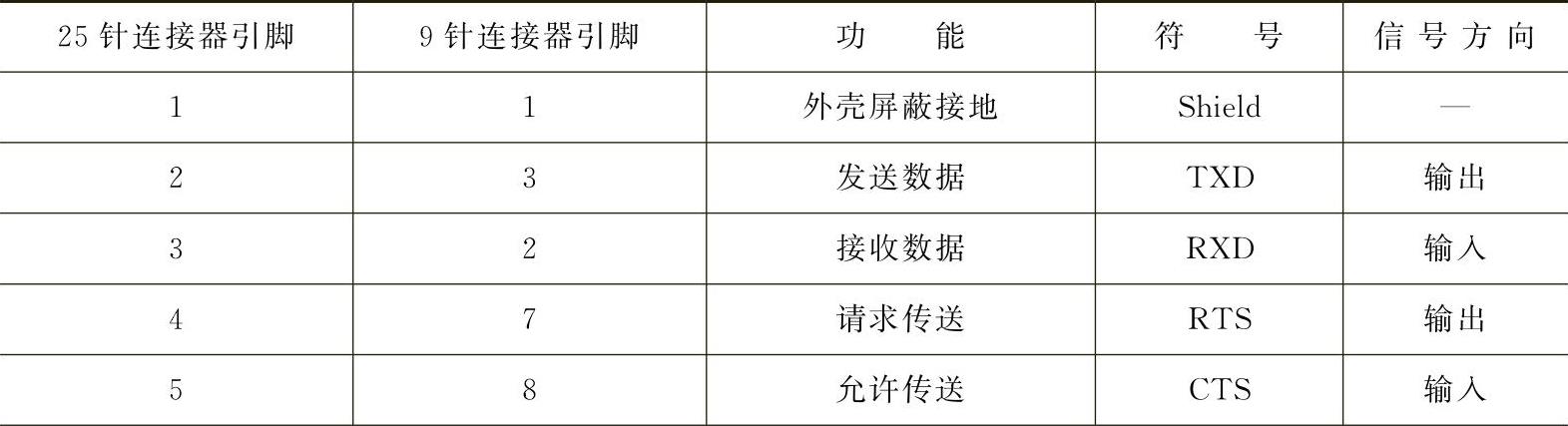
RS232C标准规定使用25芯的DB型连接器,并定义了其中的21个插针的功能。在计算机和数控系统中,RS232C接口有25针和9针两种,各引脚功能及对应关系见表3-2。
数控系统和微型计算机串行通信时,根据其RS232C接口所用连接器不同,有3种连接形式,如图3-11所示。图中实线必须连接,虚线的连接与否可根据通信双方的传输握手方式而定。当采用RTS/CTS握手时,虚线必须连接;当采用同步字符XON/XO-FF(11H/13H)握手时,虚线可以不连。
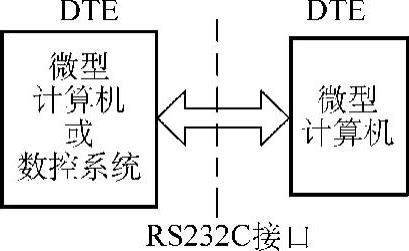
图3-10 零Modem数据通信系统
表3-2 常用的RS232C接口信号
(续)

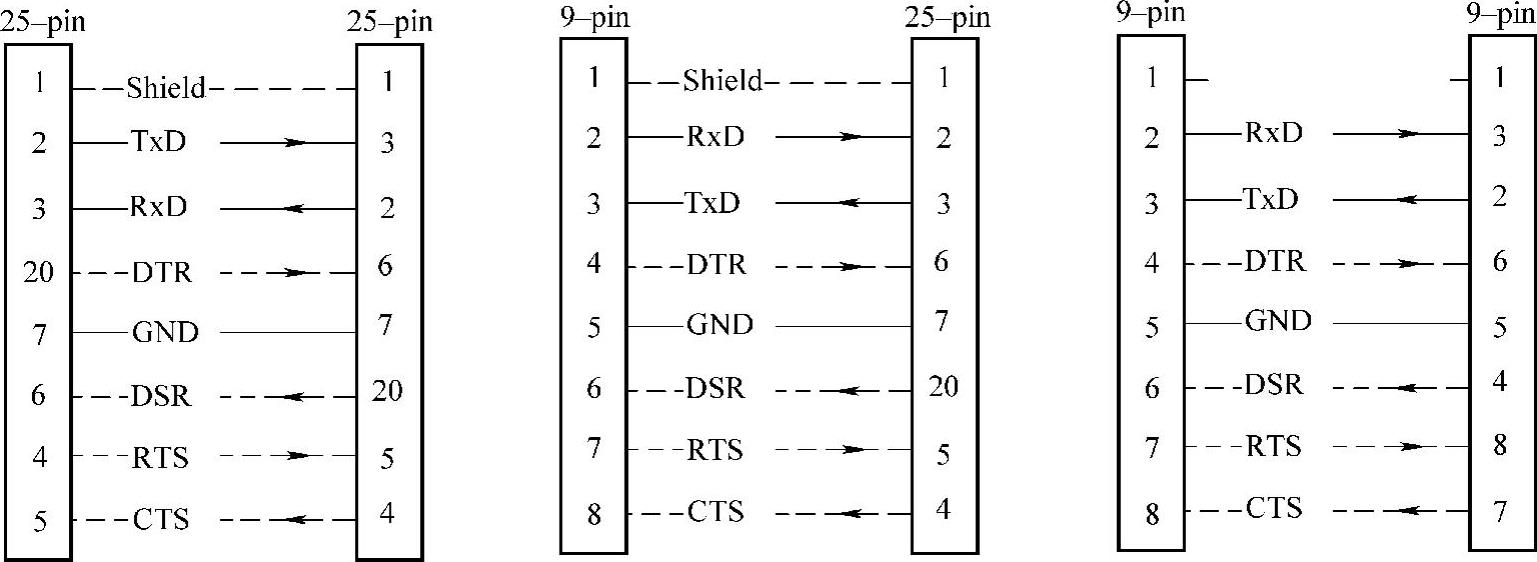
图3-11 RS232C接口连接形式
在异步串行传输中,以字符为单位进行传输,字符与字符之间没有固定的时间间隔要求。传输时,每个字符前都要有一位起始位,接着是该字符的5~8位数据位(依据其编码方式而定),随后是一位奇偶校验位(有时也可以没有奇偶校验位),最后是1~2位的终止位。异步串行传输的格式如图3-12所示。
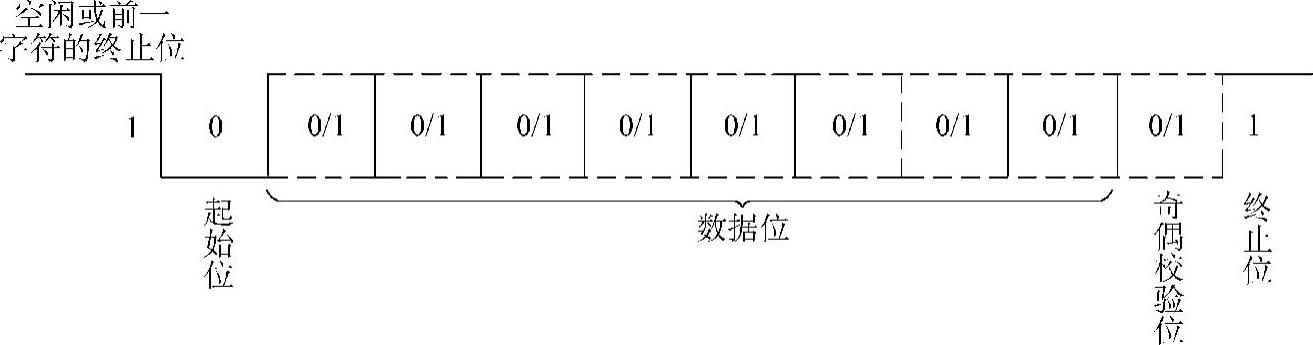
图3-12 异步串行传输的格式
从图3-12中可以看出,起始位取低电平(逻辑“0”),终止位和空闲位取高电平(逻辑“1”),这就保证起始位开始处有一个下降沿。接收端就是靠检测这个下降沿得知一个字符开始的,并以此沿作为采样后面各位的定时基准。
在进行计算机与CNC控制器连线时,连接电缆一般要求是带屏蔽的双绞线电缆。计算机与数控系统之间的通信距离一般能达到30m,如果通信距离较长,可在计算机与数控机床的RS232C接头上分别加装远程驱动模块,此时通信距离可增加到1~10km。
在计算机与数控机床之间进行串行通信时,需要在微型计算机上运行专门的软件,如WinPCIN、MtIlti-DNC等,大多数CAD/CAM集成软件系统也都直接提供传输模块。在进行通信时,需要对这些软件和数控系统进行串行通信参数设置。这些参数包括:设备(RTS/CTS、XON/XOFF)、波特率(Baud Rate)、奇偶校验(Parity)、数据位(Data bits)和停止位(Stop bits)等。图3-13所示为WinPCIN的软件操作界面,图3-14为RS232 Config的通信协议设置界面。

图3-13 WinPCIN软件操作界面
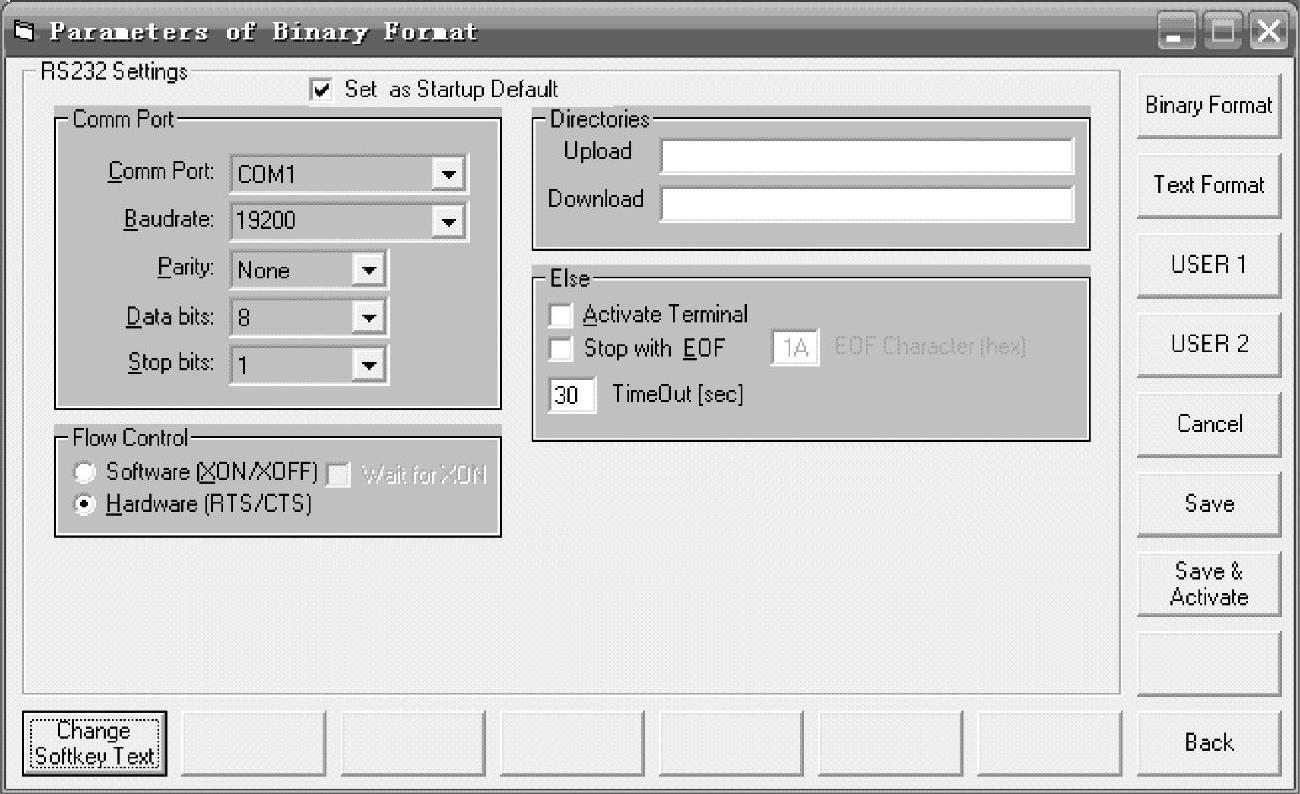
图3-14 RS232通信协议设置界面
3.数控加工程序的预处理
数控加工程序输入到缓冲器后,下一步的任务就是数据预处理,为后续的插补运算工作做好一切准备。其主要包括:数控加工程序的译码、运动轨迹的刀具补偿计算和速度处理三部分。
(1)数控加工程序的译码
虽然要执行的零件程序段已经转换成了内码形式并存储在零件程序缓冲器中,但是还不便于后续软件的处理计算,主要表现在以下几个方面。
①书写格式不统一。如:N10 G01 X106 Y-64 F46 LF程序段,也可以写成:N10 G01 Y-64 X106 F46 LF形式。
②各坐标值是BCD码形式,不便于刀具补偿和插补计算。
③仅含有本段程序信息,不包括历史数据,对后续程序的处理不利。
因此,在进行刀具补偿计算和其他处理之前,必须先对其进行译码。所谓译码,就是将输入的数控加工程序段按一定规则翻译成统一的数据格式,并按约定的格式存放在指定的译码结果缓冲器中。具体来讲,译码就是从零件程序缓冲器(或MDI缓冲器)中逐个读入字符,识别出文字码和数字码,根据文字码所代表的功能确定目标地址,将数字码进行代码转换(BCD→二进制等)后,送到相应的译码结果缓冲器单元中,并进行语法检查和错误诊断。可见,译码工作主要包括代码识别和功能码的译码两大部分。
1)代码识别 在CNC系统中,代码识别由软件完成。代码识别程序按顺序逐个读取字符,与各个文字码的内码相比较。若二者相等,则说明输入了该字符,并设置相应标志或转相应的译码处理子程序;如果不是内码表中规定的文字码,则说明程序有错,置出错标志,并返回主程序。软件处理流程如图3-15所示。
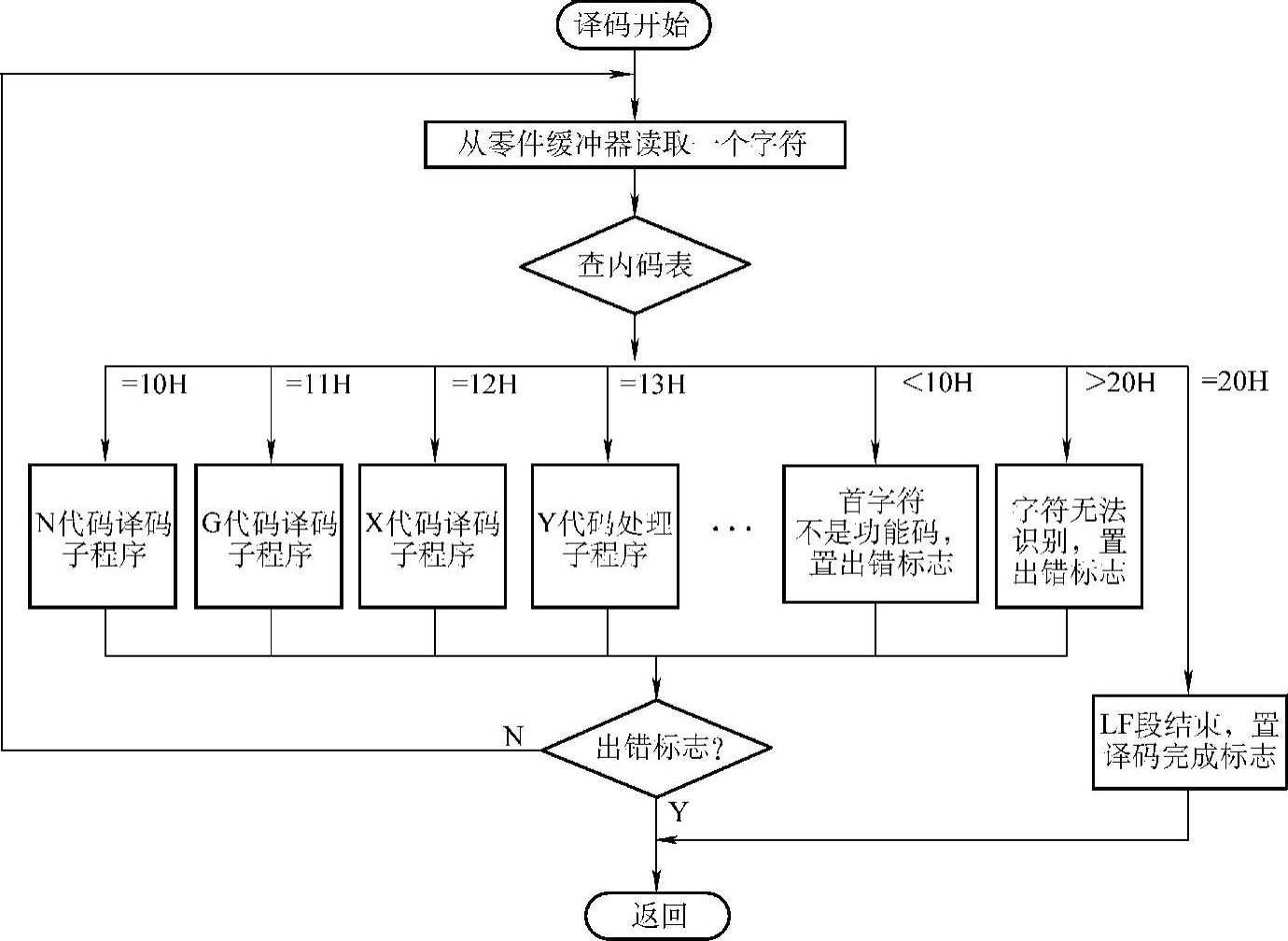
图3-15 代码识别程序流程图
2)功能码的译码 功能码译码子程序,就是将功能码后续的数字码进行代码转换(BCD→二进制等)后,送到该功能码指定的译码结果缓冲器单元中。如果数字码位数不够,则认为程序出错,并置出错标志。软件处理流程如图3-16所示。
3)译码结果缓冲器的格式 不同的CNC系统,其编程格式各有不同,译码结果缓冲器的格式设计应与零件程序格式相对应。对于某一个具体的CNC系统来讲,译码结果缓冲器的规模和格式是固定不变的,它含有所有功能码信息;各个功能码所占字节数视系统的精度、加工行程和码值范围而定;各功能码的数据格式根据后续软件的处理需要而定。典型CNC系统的译码结果缓冲器格式如表3-3所示。
表中,一般功能码只占一个单元,而对于用二进制数表示的各坐标值等则要占用两个单元。另外,考虑到某些G代码、M代码不能同时出现在同一个程序段中,如G00、G01、G02、G03和G33等,因此,没有必要为每一个G代码(或M代码)准备一个单元。可将它们分GA、GB、GC三组,把互斥的G代码(或M代码)归为一组,如表3-4所示。这样不仅能缩小缓冲区的容量,还能查出编程错误。除G代码和M代码需要分组外,其余的功能代码均只有一种格式,它的地址在内存中是可以指定的。
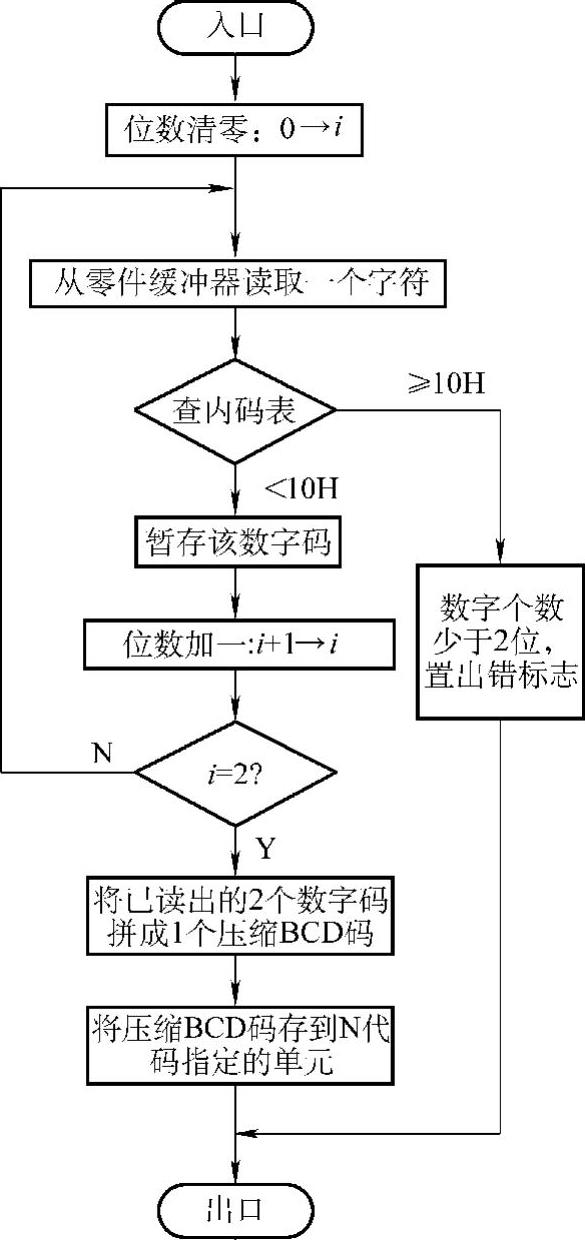
图3-16 N代码译码子程序流程图
表3-3 译码结果缓冲器格式
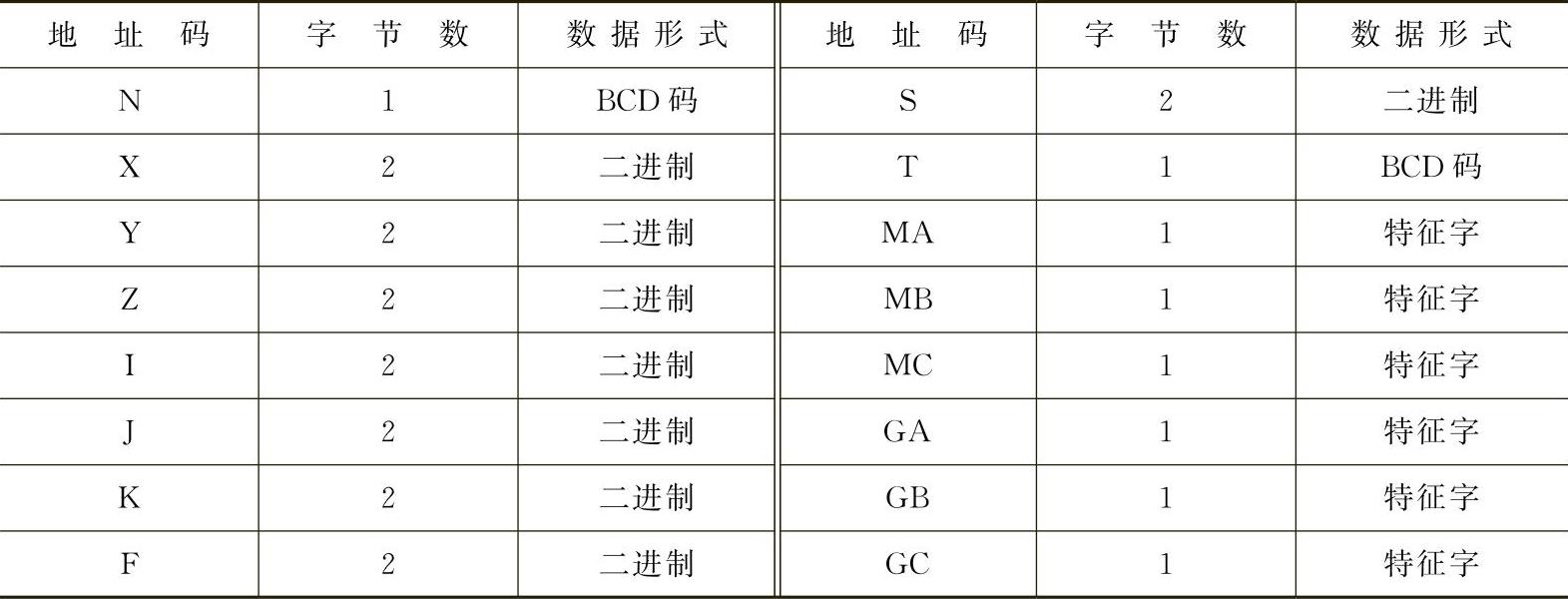
表3-4 常用G代码、M代码的分组
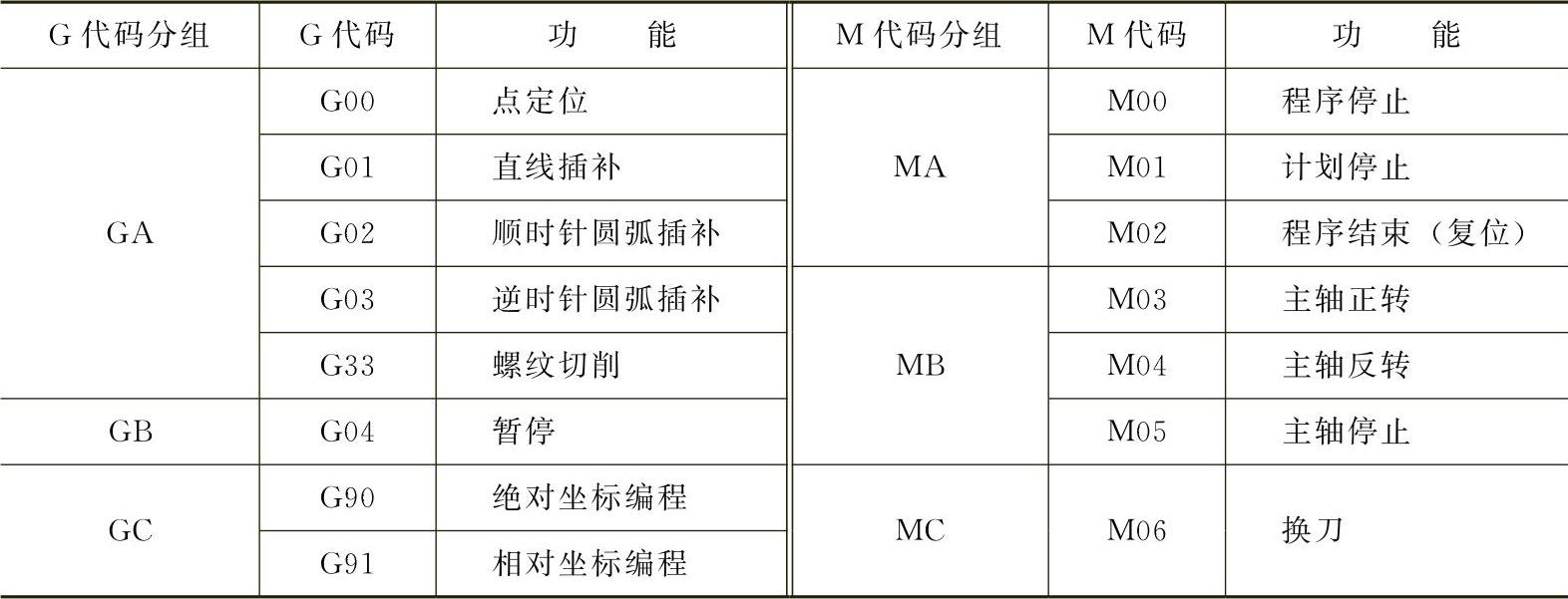
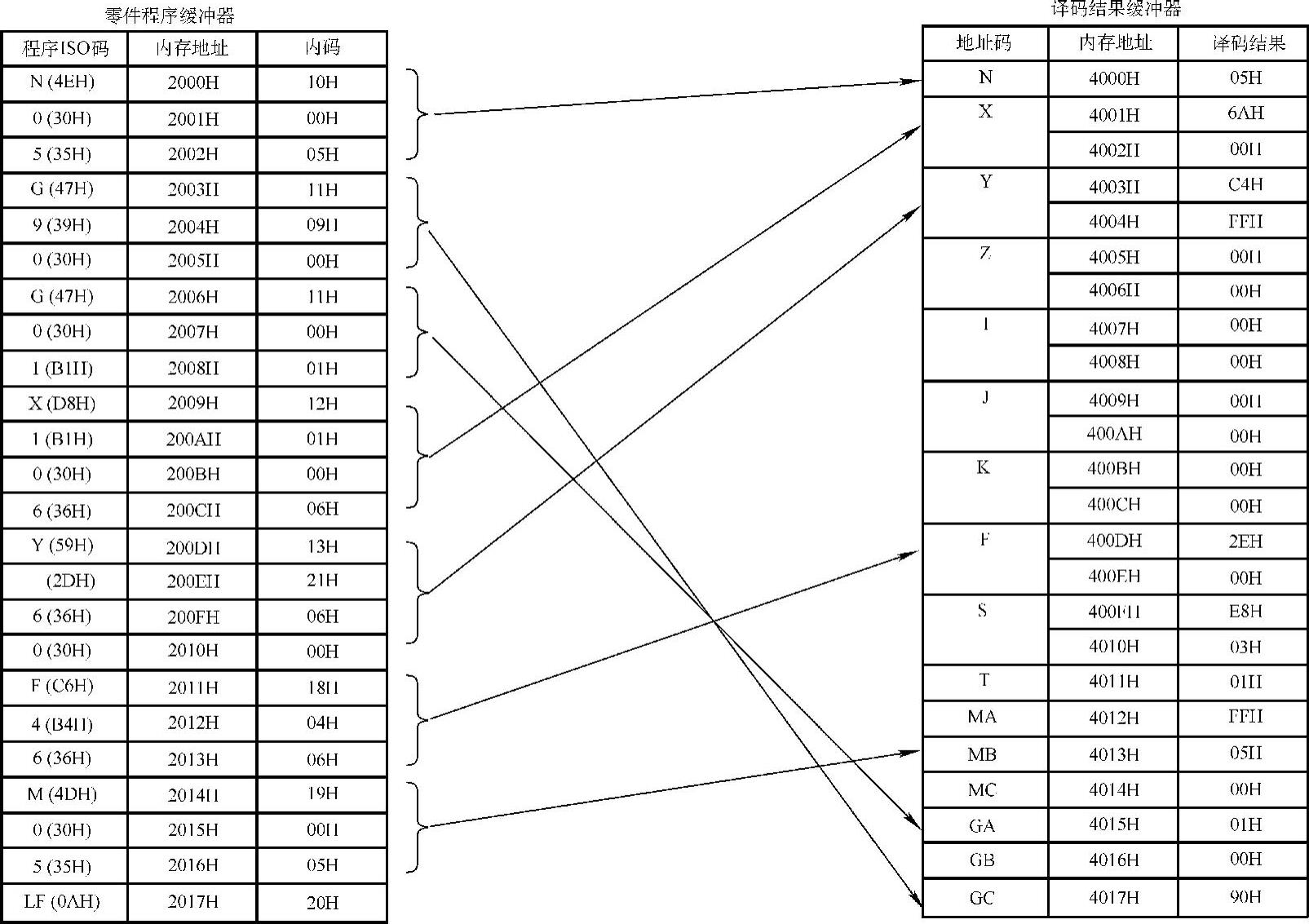
图3-17 零件程序译码过程示意图
4)译码过程 图3-17是零件程序译码过程示意图,这里假设译码结果缓冲器的起始地址是4000H。译码软件首先从零件程序缓冲器中读入一个字符,判断出是该程序段的第一个功能码N,设标志后接着读取下一个字符,判断是数字码0。由于N后面应该是二位的BCD码,故再读取一个字符,判断是数字码5,将它们拼装成压缩BCD码,并存入译码结果缓冲器N代码对应的内存单元4000H中。再取下一个字符是G代码,同样先设立相应标志,接着分两次取出G代码后面的二位数码(90),判别出是属于GC组,则在译码结果缓冲器中GC对应的内存单元4017H置入“90H”即可。继续再读入下一个字符仍是G代码,并根据其后的数字(01)判断出应属于GA组,这样只要在GA对应的内存单元中置入“01H”即可。接着读入的代码是X代码和Y代码及其后紧跟的坐标值,这时需将这些坐标值内码进行拼接,并转换成二进制数,同时检查无误后,便可将其存入X或Y对应的内存单元之中。如此重复进行,一直读到结束字符LF后,才进行有关的结束处理,并返回主程序。对于程序段中没有出现的功能码,则保留其初始结果。
(2)刀具补偿原理
在编写零件加工程序时,一般按照零件轮廓要求决定零件程序中的坐标尺寸。在数控机床实际加工时,CNC系统控制的是刀具中心(或基准点)轨迹,靠刀具的刀尖或刀刃外缘来实现切削。因此,必须根据刀具的形状、尺寸等对刀具中心位置进行偏置,将编程零件轨迹变换为刀具中心轨迹,从而保证刀具按其中心轨迹移动,从而能够加工出所要求的零件轮廓。这种变换的过程就称为刀具补偿,也叫刀具偏置(Tool Offset)。(https://www.xing528.com)
刀具补偿包括刀具长度补偿、刀具半径补偿以及刀具磨损量的补偿,对于不同类型的机床与刀具,需要考虑的补偿形式也不一样,如图3-18所示。对于铣刀而言,主要是刀具半径补偿;对于钻头而言,只有刀具长度补偿;但对于车刀而言,却需要两坐标长度补偿和刀具半径补偿。其中,有关刀具的编号、长度、半径、磨损量等参数,均需要预先存入CNC系统的刀具补偿参数表中,不同的刀具补偿号对应着不同的参数。编程员在进行程序编制时,通过调用不同的刀具号来满足不同的刀具补偿要求。
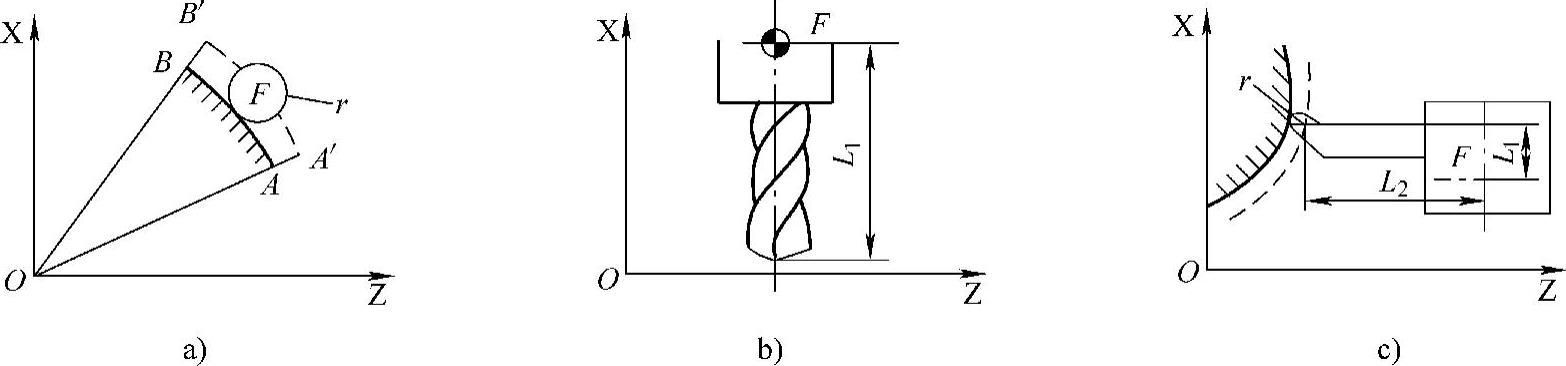
图3-18 刀具补偿原理
a)铣刀 b)钻头 c)车刀
1)刀具长度补偿 刀具长度补偿可以在不改变零件程序的情况下,随时补偿刀具长度尺寸的变化。
①铣床、钻床刀具长度补偿。
铣床、钻床的刀具补偿是对垂直于主平面的坐标轴实施的。一般用一把标准刀具的刀头作为刀具中心控制点,并将这把刀具定为零长度刀具。如果加工时用到长度不一样的刀具,则要进行刀具长度补偿。刀偏值等于所用刀具与标准刀具的长度差值,并用G43、G44指令指定偏置方向。其中,G43为正向偏置,G44为负向偏置,G40为取消偏置,如图3-19所示。
其刀具补偿计算公式为
zs=zp±L式中,在G43时用加号,在G44时用减号。
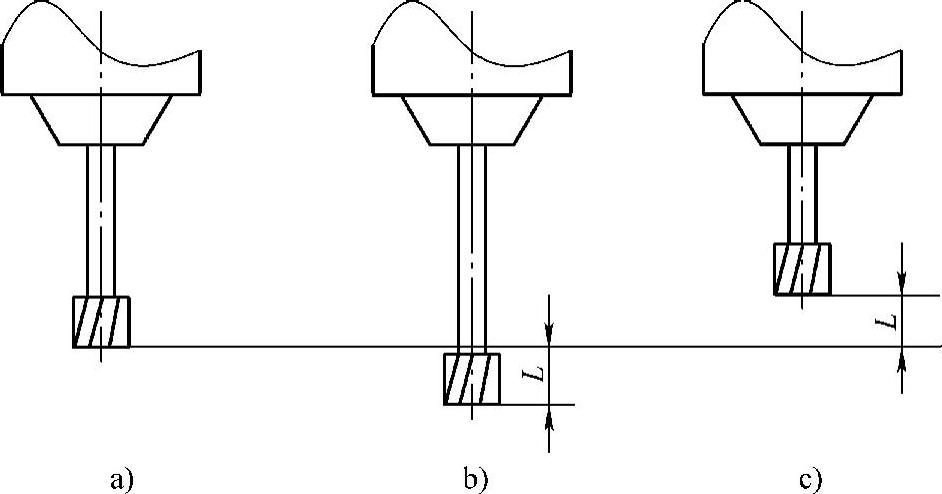
图3-19 铣床刀偏情况
a)标准刀具G40 b)正向偏置G43 c)负向偏置G44
另外,也可以把刀具长度的测量基准面作为刀具中心,则每一把铣刀、钻头都要进行长度补偿才能加工出正确的零件表面。如图3-20所示,设钻床编程坐标点为P(xp,yp,zp),钻头长度为L,建立刀具补偿后的坐标点在S(xs,ys,zs),则有计算公式:
xs=xp
ys=yp
zs=zp+L
可见,刀具补偿计算就是根据编程坐标和刀具尺寸计算出刀具中心坐标,供后续处理软件插补运算。
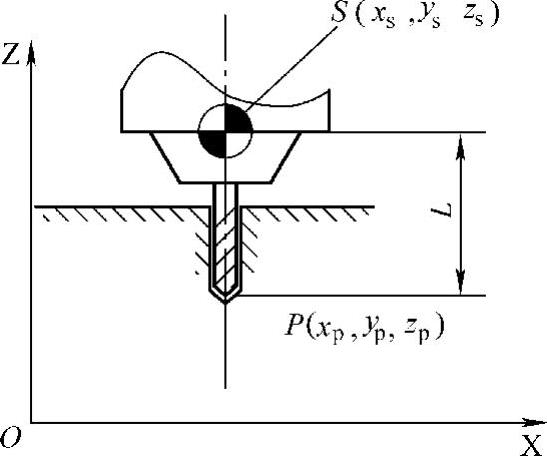
图3-20 钻床刀具补偿坐标计算
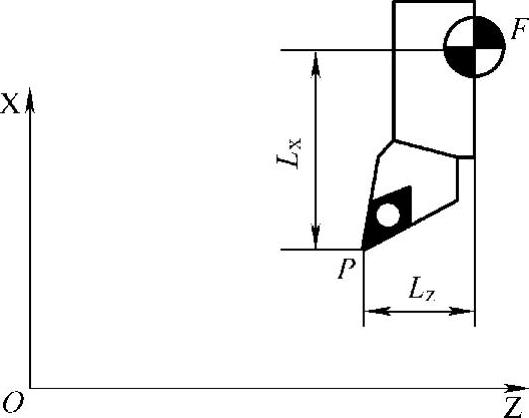
图3-21 车床刀具补偿计算
②车床刀具长度补偿。
车床的刀具长度补偿是对XZ平面的坐标轴实施的。通常以刀架参考点(也可用标准刀具的刀尖)作为刀具中心控制点,进行X、Z两个方向的长度补偿。如图3-21所示,设编程坐标点为P(xp,zp),车刀长度为Lx、Lz,刀架参考点坐标为F(xf,zf),则刀具补偿计算公式为
xf=xp+Lxzf=zp+Lz
这里忽略了刀具圆弧半径补偿,认为是理想刀尖。实际上,刀尖处总是存在圆弧的,要想正确地实现零件加工,除了进行长度补偿外,还需进行刀具圆弧半径补偿。
2)刀具半径补偿 在连续轮廓加工过程中,由于刀具总有一定的半径,例如铣刀的半径、车刀的刀尖圆弧以及线切割机的钼丝半径等。如果不考虑刀具半径,让刀具中心按编程轨迹运动,则加工出来的零件轮廓就会偏离图样要求。
例如在编制数控车床加工程序时,通常将刀尖看作是一个点。然而在实际应用中,为了提高刀具寿命和降低加工表面的粗糙度,一般是将车刀刀尖磨成半径约为0.4~1.6mm的圆弧,如图3-22所示。这样,如果仍以理论刀尖点P来编程,数控系统控制P点的运动轨迹,而切削时,实际起作用的切削刃是圆弧的各切点,这势必会产生加工表面的形状误差。
因此,在进行实际加工之前,操作者必须将车刀、铣刀或钼丝的半径作为刀偏参数输入到CNC系统中,并由零件程序的编制人员根据刀具的行进方向以及刀具与工件之间的相对位置,在零件程序中用G41、G42指令指定偏置方向。CNC系统就能够根据零件程序和输入的刀具半径值进行刀具半径补偿计算,使刀具中心偏移零件轮廓表面一个刀具半径值,自动地加工出符合图样要求的零件。这种偏移就称为刀具半径补偿,如图3-23所示。
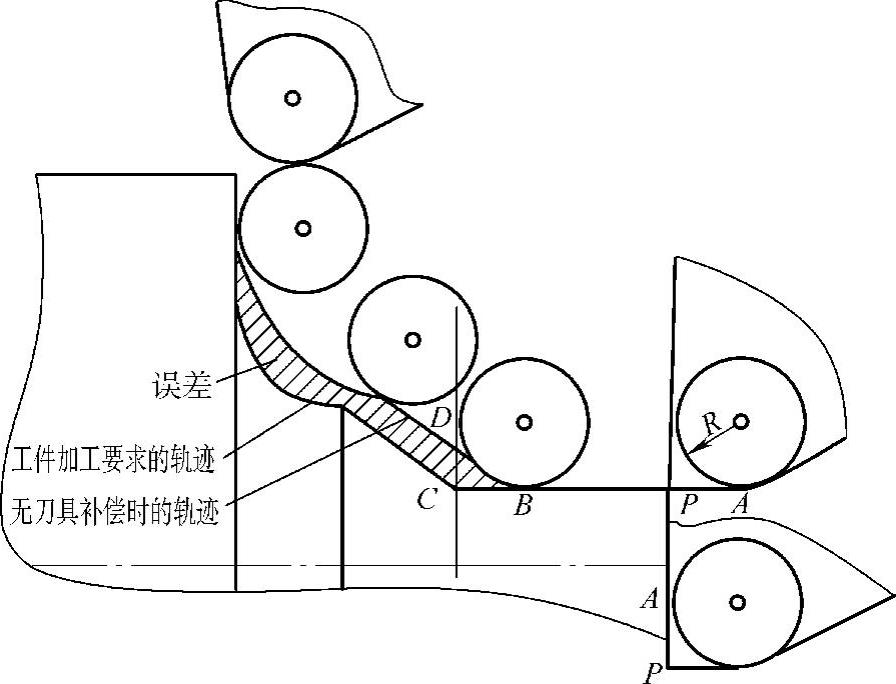
图3-22 刀尖圆弧半径对加工表面形状的影响
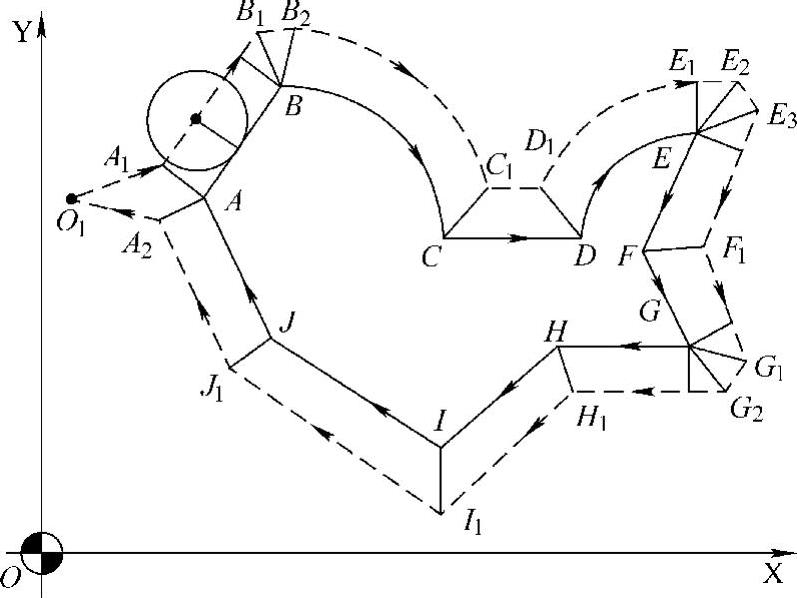
图3-23 刀具半径补偿示意图
图3-23中,要求加工的零件轮廓为ABCDEFGHIJA,起刀点在O1处,经过刀具半径补偿处理后,获得如虚线所示的刀具中心轨迹。其中,O1A1为刀具半径补偿建立段,A2O1为刀具半径补偿撤销段,其他各段均为刀具半径补偿进行段。
①刀具半径补偿方向。
为了规范零件编程,ISO标准规定,当刀具沿编程轨迹前进方向左侧行进时,称为左刀具半径补偿,用G41表示;反之,沿编程轨迹前进方向右侧行进时,称为右刀具半径补偿,用G42表示;当取消刀具半径补偿时,用G40表示。刀具半径补偿方向如图3-24所示。
②刀具半径补偿的执行过程。
在实际轮廓加工过程中,刀具半径补偿的执行过程分为刀具半径补偿的建立、刀具半径补偿的进行和刀具半径补偿的撤销三个步骤。
刀具半径补偿的建立是指刀具由起刀点接近工件(图3-23中O1A1段)的过程中,执行G41(或G42)指令建立刀具半径补偿,刀具中心逐渐偏离编程轨迹,当到达终点A时正好偏离一个刀具半径的距离。
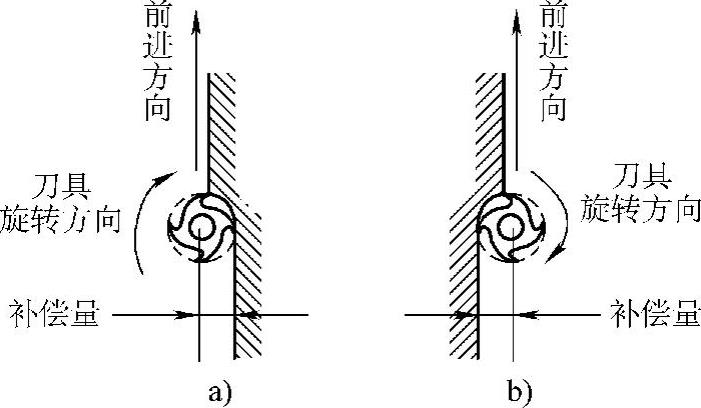
图3-24 刀具半径补偿方向
a)左刀具半径补偿G41 b)右刀具半径补偿G42
刀具半径补偿建立后,刀具中心始终垂直偏离编程轨迹一个刀具半径的距离,靠刀刃外缘加工零件轮廓。
零件加工完毕后,在刀具撤离工件,回到起刀点(图3-23中A2O1段)的过程中,执行G40指令,刀具逐渐回位。
③刀具半径补偿的转接过渡类型。
一般的CNC系统所能控制的加工轨迹仅限于直线和圆弧,前后两段编程轨迹间共有四种连接形式,即直线与直线相接(L-L)、直线与圆弧相接(L-C)、圆弧与直线相接(C-L)、圆弧与圆弧相接(C-C)。根据两轮廓段交点处在工件侧的夹角α的不同,直线过渡的刀具半径补偿可以分为以下三种转接过渡类型:
180°≤α<360°,缩短型过渡;
90°≤α<180°,伸长型过渡;
0°≤α<90°,插入型过渡。
角度α称为转接角,其变化范围为0°≤α<360°。α角的约定如图3-25所示,为两个轮廓段转接处工件一侧的夹角。
在刀具半径补偿执行过程的三个步骤中,均有可能遇到上述三种转接过渡类型,下面仅以直线接直线(L-L)为例加以说明。其他L-C、C-L、C-C的情况,读者自行分析。
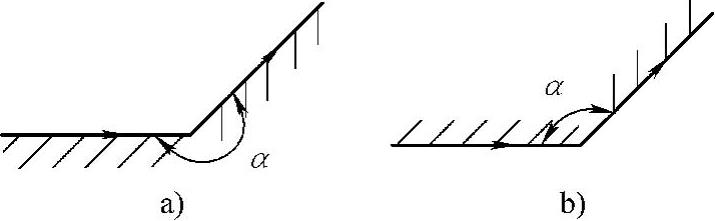
图3-25 转接角示意图
a)G41时 b)G42时
图3-26是L-L刀具半径补偿建立过程中三种转接类型的过渡形式,图3-27是L-L刀具半径补偿进行过程中三种转接类型的过渡形式,图3-28是L-L刀具半径补偿撤销过程中三种转接类型的过渡形式。转接过渡的原则是:保证零件轮廓接近编程轮廓,确保转接处的工艺性,刀具紧贴工件轮廓。
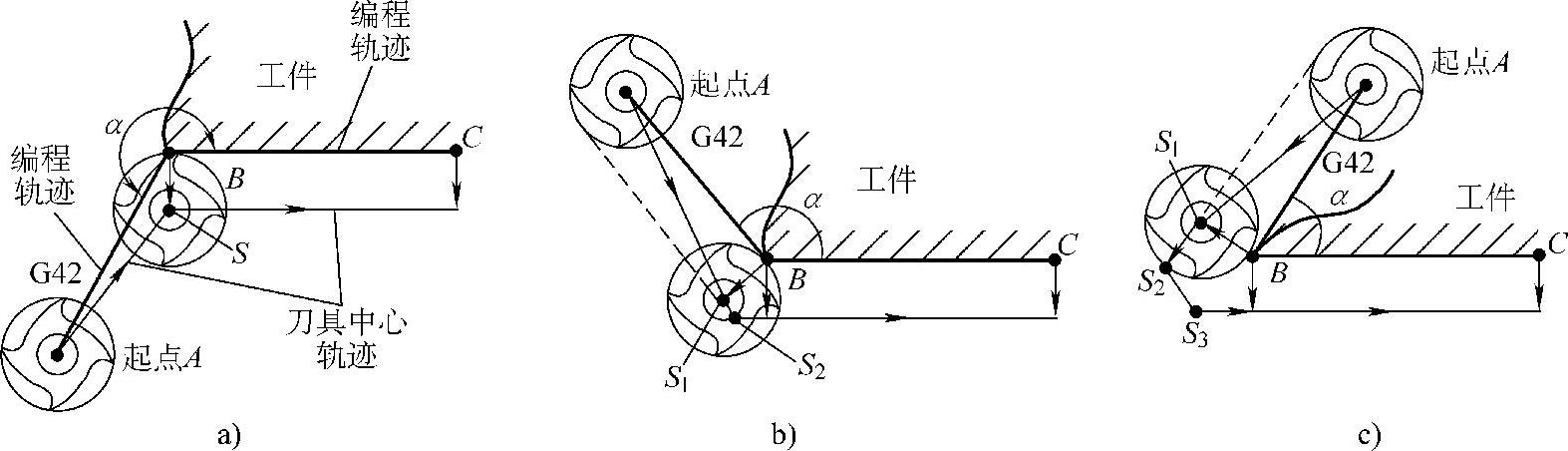
图3-26 刀具半径补偿建立示意图
a)缩短型 b)伸长型 c)插入型
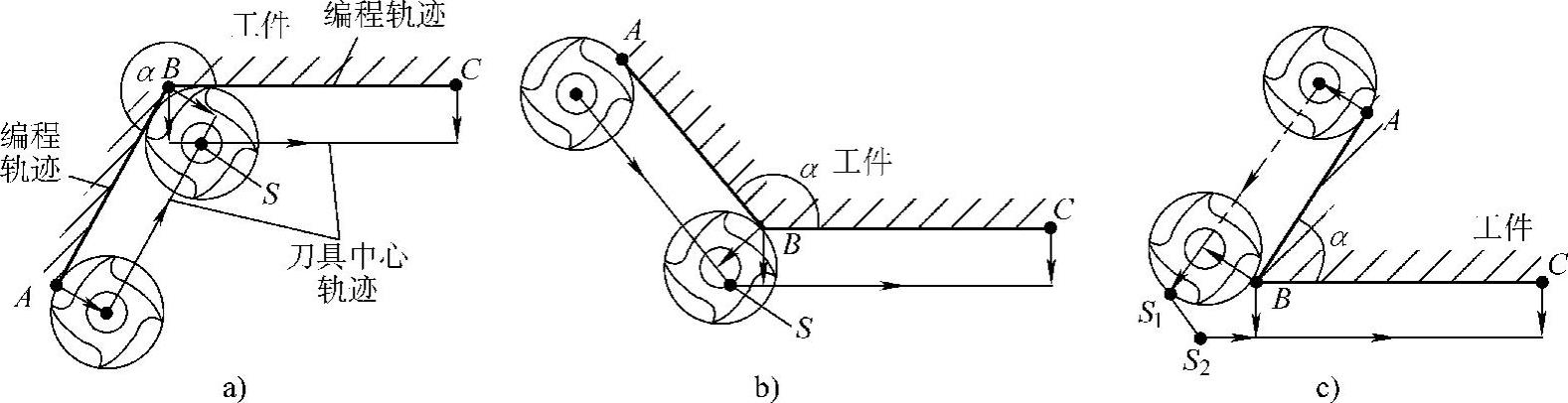
图3-27 刀具半径补偿进行示意图
a)缩短型 b)伸长型 c)插入型
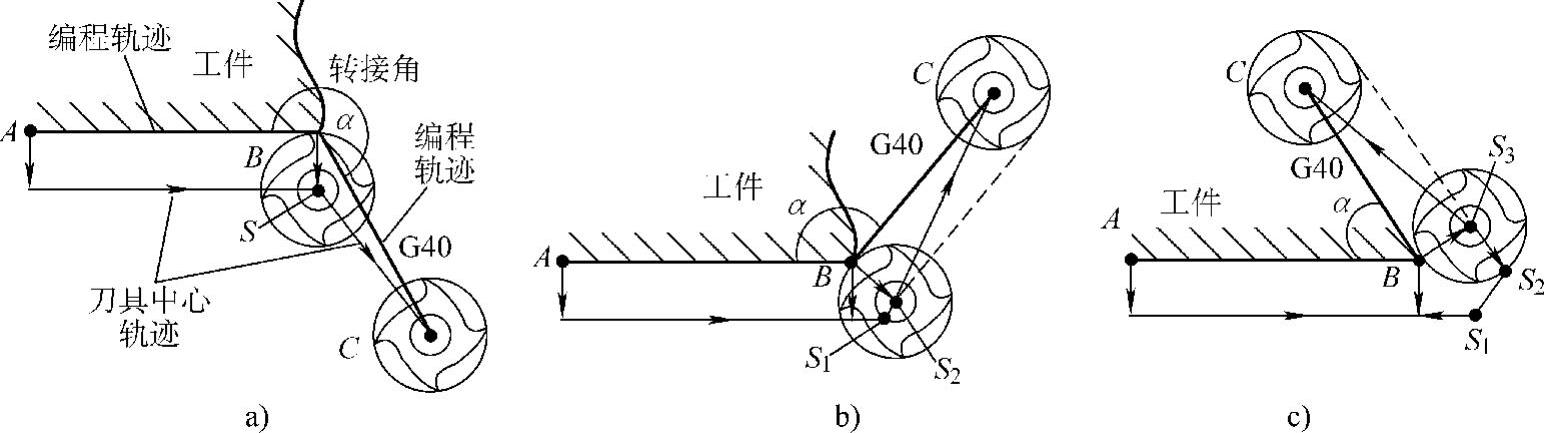
图3-28 刀具半径补偿撤销示意图
a)缩短型 b)伸长型 c)插入型
④刀具半径补偿的计算。
刀具半径补偿计算的主要工作是计算各种转接类型的转接点坐标值。它是根据相邻编程轮廓段的起止点坐标值,判断转接类型,调用相应的计算程序,计算出转接点坐标值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。