



脉振高频电压注入法只是在电机的同步旋转坐标系d、q轴中的d轴注入高频电压,这个高频电压在静止坐标系α、β轴中表现为一个脉振高频电压。
根据式(5-109)有

由于注入电压信号的频率要远高于电机转子频率,因此电机可以等效为R-L模型,根据dq坐标系下永磁辅助同步磁阻电机的电压数学模型,可以推出此时的高频电压方程为

式中,Zdh和Zqh分别为d、q轴高频等效阻抗,定义转子位置信息估计误差Δθ为

式中, 为估计值,θ为真实值,关系图如图5-30所示。
为估计值,θ为真实值,关系图如图5-30所示。
定义T(Δθ)为真实转子位置到估计转子位置的转换矩阵。
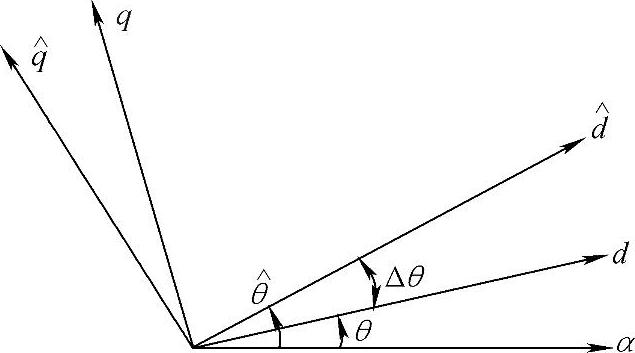
图5-30 估算转子位置和实际位置关系图

则在旋转坐标系d、q轴下,高频电压和电流关系可以写成
化简可以得到
 (https://www.xing528.com)
(https://www.xing528.com)
式中 Z=(Zd+Zq)/2——d、q轴平均高频阻抗;
ΔZ=(Zd-Zq)/2——d、q轴半差高频阻抗。
假设在永磁辅助同步磁阻电机dq坐标系中,估计d轴注入高频正弦信号为
则式(5-122)可以表示为
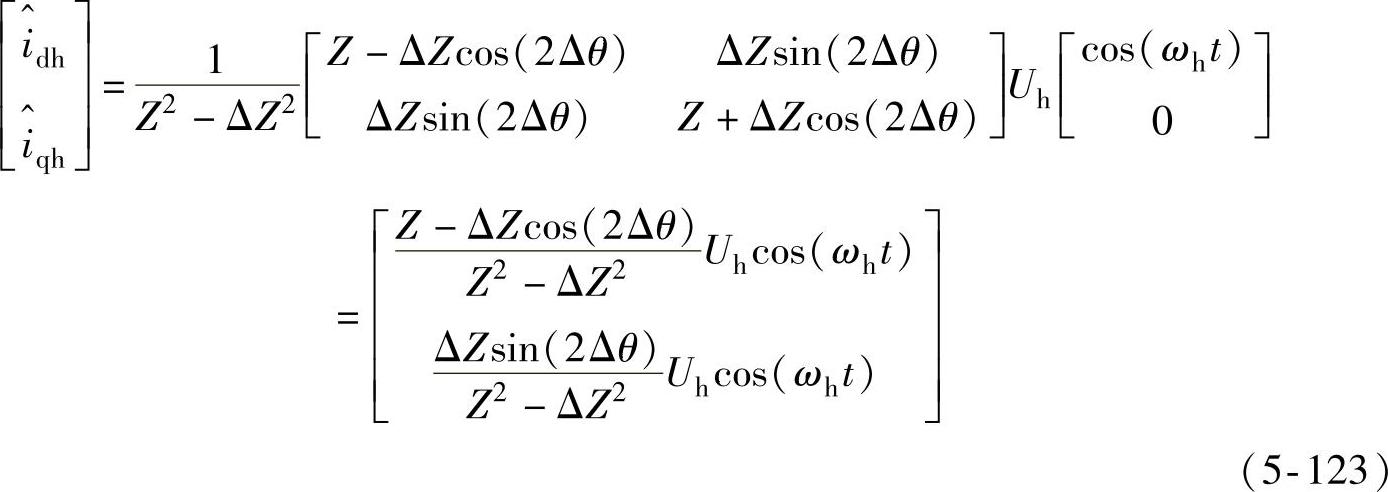
由式(5-123)可以看出,如果半差高频阻抗ΔZ不为0,则估计的旋转坐标系d、q轴中,d轴和q轴上的高频电流分量都与估计转子位置的误差Δθ有关。若Δθ为0,则d轴上的电流并不为0,而q轴上的电流为0,所以选择q轴上的高频电流分量进行相应的处理以得到转子位置信息,提取原理如图5-31所示,采集电机的三相电流经过坐标变换后得到估计的q轴电流,然后经过一个带通滤波器得到q轴的高频电流信息,再乘以调制信号sin(ωht)进行信号调幅,得到关于转子位置误差信息的函数 。
。
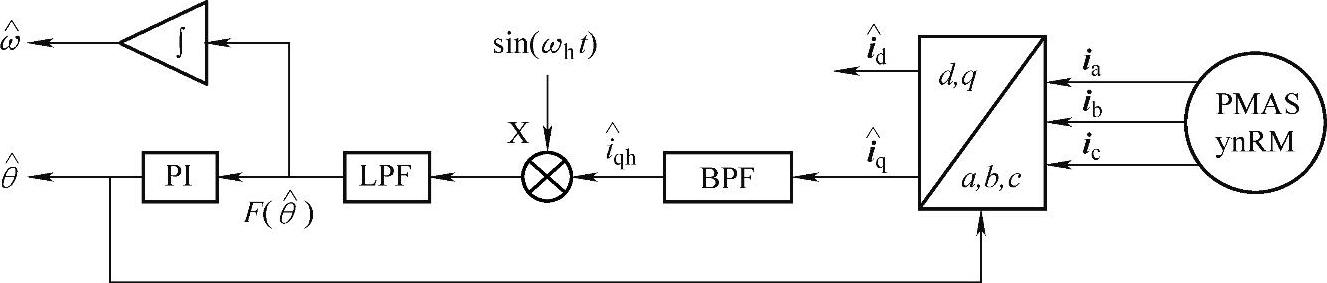
图5-31 转子位置信息提取原理图

从式(5-124)可以看出,当Δθ接近0时,sin(2Δθ)≈2Δθ, 可以表示为
可以表示为 ,其中,K=(UhΔZ/ωh)/(Z2-ΔZ2)为误差增益。如果通过调节器把
,其中,K=(UhΔZ/ωh)/(Z2-ΔZ2)为误差增益。如果通过调节器把 调节为0,则估计转子位置信息误差为0,
调节为0,则估计转子位置信息误差为0, 。在这里调节器采用PI调节器,如图5-31所示。
。在这里调节器采用PI调节器,如图5-31所示。
脉振高频电压注入法在误差函数 趋近于0时存在两种情况,一种是
趋近于0时存在两种情况,一种是 ,另一种是
,另一种是 。所以利用脉振高频电压注入法估算转子位置信息时,在起动时刻还需要进行极性判断,否则会存在起动失败的情况。
。所以利用脉振高频电压注入法估算转子位置信息时,在起动时刻还需要进行极性判断,否则会存在起动失败的情况。
判断转子极性可以利用磁路饱和效应,脉振高频电压注入法可以通过直接观测d轴高频电流来判断磁极极性。当id>0时,定子电流与永磁体的磁链方向一致,d轴电感降低;当id<0时,定子电流与永磁体的磁链方向相反,d轴电感升高。利用这种特性可以辨别出电机磁极的极性。当Δθ接近0时,估算出的高频d轴电流可以表示为

根据以上分析,当估计转子位置信息与实际位置一致时, 的正向幅值大于负向幅值;当估计转子位置信息与实际位置相反时,
的正向幅值大于负向幅值;当估计转子位置信息与实际位置相反时, 的正向幅值小于负向幅值。所以可以通过一个低通滤波器(LPF)来提取
的正向幅值小于负向幅值。所以可以通过一个低通滤波器(LPF)来提取 的直流分量,直接通过判断直流分量来判断磁极极性。
的直流分量,直接通过判断直流分量来判断磁极极性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。